英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
期刊
机 械 科 学 与技术
机械科学学报23(2009)974〜979
www.springerlink.com/content/1738-494x
DOI 10.1007/s12206-009-0324-5
带助力系统和舒适提篮的智能婴儿车的研究dagger;
川岛武*
神奈川工业大学机械工程系,厚木下mo野1030,日本243-0292
(文稿于2008年12月24日收到; 2009年3月16日修订; 2009年3月16日接受)
摘 要
在日本,通常使用轻便且易于折叠的婴儿车,因为父母在上下楼梯时必须同时抱住婴儿及其车架。由于乘私家车上下班的家庭在增加,因此需要具有高功能性的车厢。在这项研究中,通过实验开发了一种智能婴儿车,该婴儿车配备了先进的电动混合动力辅助系统,使用轮内式电动机做动力源。该系统通过使用超声波距离传感器检测人行道的边缘,来帮助父母将童车提升到人行道上。该童车还具有以下功能:倾斜控制系统,即使在斜坡上也可将篮子保持在水平位置;心跳模拟器可通过模拟父母的心跳为篮子中的婴儿提供舒适感。通过进行实验证实了所提出的托架的有效性。
关键字:辅助系统;乘坐舒适;心跳智能设备;运动控制;巡逻车婴儿车倾斜控制
- 引言
大多数婴儿车属于A型(床型)或B型(椅子型)。可以方便地调整这些托架,以适应婴儿的年龄和生活方式。尽管一些城市已经配备了足够的设施,用于婴儿车的便捷使用,但仍然存在许多地方,例如车站或人行天桥上的楼梯,很难乘坐婴儿车移动。在日本,鉴于父母必须在,车站上下楼梯时必须同时抱住婴儿及其婴儿车,因此通常使用轻便且易于折叠的婴儿车。另一方面,汽车的普及导致了使用私人汽车的家庭数量越来越多,这样的父母相比较婴儿车的重量更加重视它的功能情况。因此,作者提出了一种智能婴儿车,该电动婴儿车配备了电动混合动力辅助系统,该系统由轮内式电动机和摆式篮组成,可在倾斜运动时被动减小俯仰角和侧倾角[1]。在这项研究中,为了开发出一种既方便婴儿又方便父母的新型童车,所以选用了A型婴儿车。
年8月20日至23日在韩国济州岛举行的第四届亚洲多体动力学会议(ACMD2008)上发表。
*通讯作者电话: 81 46 291 3122,传真: 81 46 242 6806电子邮件地址:kawashima@eng.kanagawa-it.ac.jp
copy; KSME amp; Springer 2009
当在平坦的道路或斜坡上移动时,轮内式电动机通过助力帮助父母移动车架。该系统还通过使用超声波距离传感器检测人行道的边缘,控制车架的速度以及通过轮内式电机施加扭矩来抬起前轮,来帮助父母将婴儿车提升到人行道上。此外,童车还配备有倾斜控制系统,该系统可控制吊篮的俯仰角,即使在斜坡上也可将其保持在水平位置。它还配备了心跳模拟器,可生成微弱的电击,模拟父母的心跳用于安慰在篮子处于水平位置时的婴儿。而且通过进行实验证实了这种装置的有效性。
-
婴儿车的设计
- 轮毂电机的布置
将四个车轮都使用轮内式电动机可以提高其适应性,因为驱动能量是通过细电线传递给车轮的。换句话说,可以根据道路状况自由地改变轴距和车轮的胎面。但是,如果四个轮子都装有电动机,则托架又会变重。
通过驱动左右车轮之间的转速差,驱动前轮可,以使滑架向左或向右转动。此外,前轮驱动有助于婴儿车爬上高度低于车轮半径的台阶或人行道。但是,前轮上的额外重量可能会使父母难以通过使用安装在车架后部的推杆来移动车架。
另一方面,如果驱动后轮,则不能通过引入左右轮的转速之间的差来使婴儿车转动。并且在转弯开始时,操作人员需要一点点帮助。附加力的施加可以被识别为来自驾驶员的转向信号,此操作适用于辅助系统。当车架在人行道上行驶时,与后轮驱动相比,操作员会发现在后轮驱动的情况下抬起前轮更容易。因此,考虑到这些优点和缺点,在本研究中,采用后轮驱动。
-
- 篮子的支撑
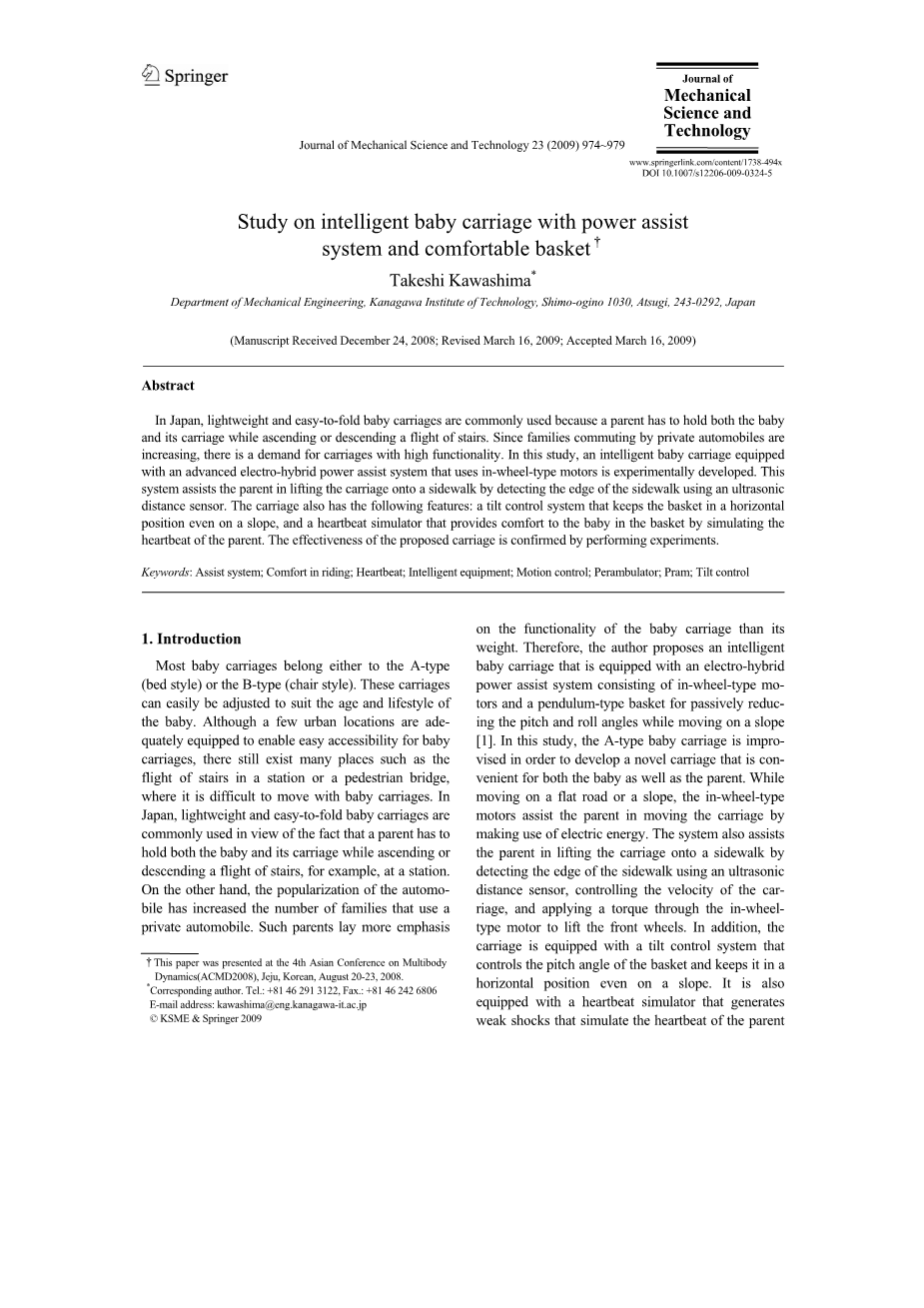
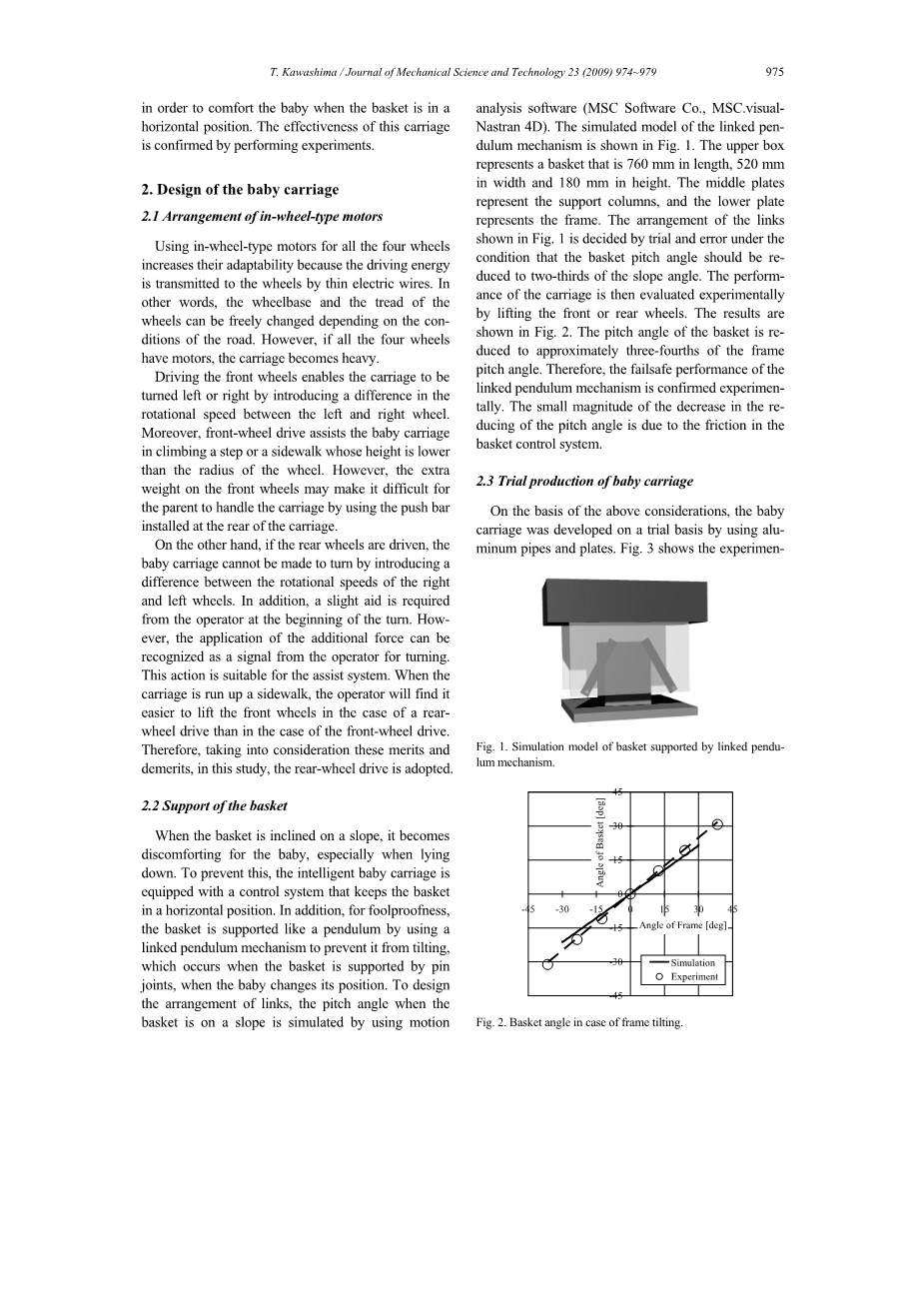
分析软件(MSCSoftwareCo.,MSC.visual- Nastran4D)。链接摆机构的仿真模型如图1所示。上面的框代表一个篮子,篮子长760毫米,宽520毫米,高180毫米。中板代表支撑柱,下板代表框架。图1所示的链节的布置是在网篮俯仰角应减小到倾斜角的三分之二的条件下通过反复试验确定的。然后,通过抬起前轮或后轮,通过实验评估滑架的性能。结果示于图2。篮的俯仰角减小到框架俯仰角的大约四分之三。因此,实验证明了链接摆机制的故障安全性能。俯仰角减小的较小幅度变化是由于篮形控制系统中的摩擦引起的。
-
- 婴儿车的试生产
基于上述考虑,婴儿车是通过使用铝管和铝板进行试验开发的。图3显示了实验-
图1.链接摆机构支撑的篮子的仿真模型
当吊篮倾斜在斜坡上时,它会使婴儿感到不适,尤其是在躺下时。为了防止这种情况,智能婴儿车配有控制系统,可将篮子保持在水平位置。另外,为了安全起见,通过使用联动的摆锤机构来防止篮子倾斜,就像婴儿摆一样,当婴儿改变其位置时,当篮子由销接头支撑时,倾斜就不会发生。为了设计链节的布置,使用运动来模拟篮在斜坡上时的俯仰角
-45 -3
-
模拟实验
45
30
篮子角度[度]
15
0
0 15 30 45
-15 镜框角度[°]
-30
图2.框架倾斜的角度
图3.婴儿车的实验原型
tal的原型车。滑架的总长度为1100毫米,胎面为480毫米,轴距为500毫米,车轮直径约为300毫米。篮筐由链接的摆锤机构支撑,并由嵌入式微型计算机控制的小型齿轮电动机使篮筐倾斜。为了进行倾斜控制,在篮子上安装了一个加速度传感器,用于感应篮子的俯仰角。每个后轮都配备有轮毂式电动机,该电动机由嵌入式微计算机控制,并且由设置在推杆上的油门手柄控制。油门手柄上还装有一个单向微型操纵杆,用于转动支架。超声波距离传感器安装在两个前轮之间的车架上,用于检测人行道的边缘。电源是电动混合动力自行车(或电动助力自行车)中使用的锂离子电池,并且将电池放置在篮子下方以保持平衡。另外,在篮框的底部安装了心跳模拟器,以使婴儿感到舒适。
-
智能系统
- 电动混合动力辅助系统
电动混合动力辅助系统是所提出的婴儿车的特征之一。该系统不仅有助于在平坦的道路或斜坡上移动时的滑架,还可以协助其爬上人行道。
3.1.1 协助爬上人行道
油门手柄的快速旋转使轮式电动机能够抬起前轮。但是,在低路缘的情况下,前轮可能会不必要地升高到比路缘的高度高得多的位置,因此在降落在人行道上时会产生震动。由于人类不可能
图4(a)前轮爬上了路缘
图4(b)驱动小车直到后轮碰到路缘
图4(c)后轮爬上路缘
根据路缘高度精确地操作油门,在两个前轮之间的车架上安装了一个超声波距离传感器,以检测路缘的边缘及其高度。此外,开发了一种用于将前轮提升到路缘顶部的控制系统。该算法设计如下。首先,当滑架接近路缘边缘时,其速度会降低。其次,通过快速旋转油门手柄,使轮内电动机产生提升前轮所需的大扭矩。第三,为避免前轮升高到高于要求的高度,一旦传感器未能检测到路缘的边缘,就停止施加扭矩,如图4(a)所示;第四,如图4(b)所示,滑架由电动机驱动直到后轮与路缘相遇。最后,使后轮爬上路缘,如图4(c)所示。
图5.带和不带传感器的前轮附近车架的垂直加速度比较
控制系统的有效性已通过实验得到证实。在10毫秒的间隔内测量左前轮附近车架的垂直加速度。收集的数据以25个数据点的移动平均值进行过滤,以去除高频分量。图5显示了前轮爬上路缘时的时间历程。为了比较,该图中还显示了不使用超声波距离传感器时的垂直加速度。粗线表示使用传感器的情况,虚线表示不使用传感器的情况。图中加速度的第一个正向变化对应于前轮被抬起,随后的负向变化和波动对应于前轮降落在人行道上。与不使用传感器的情况相比,使用传感器时,前轮抬起的时间更短,着陆冲击更小。而且,垂直加速度的波动立即得到抑制。因此,确认了控制系统的有效性。
-
- 篮子的倾斜控制系统
篮子的倾斜控制系统的开发旨在为篮子中的婴儿提供舒适感。为了在上升或下降斜坡时将篮框保持在水平位置,通过控制系统测量并消除了篮框的纵向加速度。它还可以防止篮子中的婴儿由于速度的突然变化而摇摆。当滑架分别加速和减速时,倾斜控制系统通过提起吊篮的后部和前部来工作。图6显示了当滑架以大约5度的倾斜度上升时,篮筐(粗线)和框架(实线)的纵向加速度的时间历程。
图6.上升斜坡时,篮和车架的纵向加速度的比较
尽管控制系统不能有效地响应加速度的快速变化,但是可以确认,篮子沿斜坡的加速度几乎为零。
- 模拟婴儿舒适度
倾斜控制系统和悬架分别减少了滑架的低频摇摆和高频振动,从而最大程度地减少了提篮中婴儿的不适感。另外,提议的婴儿车带有模拟器,该模拟器为婴儿提供舒适感。通常,婴儿在母亲拥抱时会停止哭泣。尽管可能是母亲的气味,温暖和身体形状等引起的,但其心跳的节律却是主要原因。因此,安装在篮子底部的模拟器会产生微弱的震动,以模拟操作员(即父母)的心跳。
-
- 耳传感器,心跳检测器和模拟器
选择图7所示的类似小衣夹的耳朵传感器,将其戴在耳垂上或对其进行检测,因为它会稍微干扰操作人员。这种耳朵传感器通常用于健身俱乐部的健身车(或测功计)中。被测信号被心跳检测器放大并转换为数字TTL信号。然后,通过使用小型无线发送器和接收器将信号发送到心跳模拟器。然后,在图8所示的模拟器中重现检测到的心律。在模拟心律时,模拟器使用螺线管推抵橡胶覆盖的薄塑料板上,从而产生电击。螺线管根据TTL信号工作。
图7.耳朵传感器和心跳检测器
图8.心跳模拟器
-
- 心跳模拟器的有效性
作者已经证实了心跳模拟器的有效性[2,3]。在此,说明实验步骤和结果。受检者是一个在托儿所里与祖母一起玩耍的孩子,观察员是在托儿所附近一个房间里的孩子的母亲。测量母亲的心跳,并通过心跳检测器将其转换为TTL信号。该信号通过Internet和无线系统传输到心跳模拟器。将模拟器放在枕头中,并将枕头放在儿童附近。 母亲通过摄像机观察到了孩子。实验设备如图9所示。最初,母亲的心跳模拟器将测量的母亲心跳复制到枕头上17分钟,以使孩子适应模拟器。停止模拟器10分钟,然后再次重现母亲的心跳10分钟。最后,信号发生器将标准脉搏率为1.3 Hz的恒定节奏重现10分钟。虽然模拟的持续时间已经告诉母亲,为孩子获得了以下数据。
实验之前,母亲对问卷的回答表明孩子既没有好
心情,也没有不好的心情。此外,它们表明孩子
有点劳累,兴奋和困倦。
-
-
- 母亲的心跳1,最初,孩子对枕头上模拟的声音没有反应。但是,孩子经过9分钟后开始对声音做出反应。然后,孩子用手触摸枕头,确认动作并保持住。母亲对问卷的回答表明,孩子处于一种平静的心态,它对枕头做出了回应,并且开始喜欢它。这位母亲说,孩子起初很怕枕头,但后来对枕头产生了兴趣。
- 没有模拟。4分钟后,孩子确认停止了枕头上的声音,孩子对此不再感兴趣。对问卷的答复还表明,孩子不再对此感兴趣。这位母亲说,在枕头停止模拟后,孩子并不在乎枕头。
- 母亲的心跳2,枕头发出的声音恢复后,孩子开始对枕头产生兴趣。然后,孩子用手触摸枕头并握住它。母亲对问卷的回答表明,孩子处于一种平静的心态,喜欢抱着枕头,并且喜欢抱着枕头。这位母亲说,孩子喜欢枕头,声音恢复后非常喜欢。
-
恒定的节奏。即使枕头由其祖母赠给,孩子也不会对枕头感兴趣。对问卷的答复表明,孩子对枕头没有兴趣。根据母亲的说法,即使将模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[413953],资料为PDF文档或Word文档,PDF文档可免费转换为Word
-

