
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
机器鱼的嵌入式视觉引导三维跟踪控制
俞俊志,IEEE高级成员,孙菲虎,徐德旭,IEEE高级成员,谭敏
摘要:考虑到水环境中的成像质量,自由游动机器鱼的视觉跟踪仍然是一个巨大的挑战。本文提出了一种由深度控制和方向控制组成的三维跟踪控制的视觉识别和定位方法。具体来说,提出了一种基于模糊滑模控制的深度控制方法,使机器鱼游到预定的目标深度并保持在该深度。提出了一种多阶段的定向控制方法,并提出了一系列的控制策略,将敏捷运动与控制精度结合起来。最后在室内水池中进行了深度控制和三维跟踪控制实验。最新结果表明,所提出的算法是有效可行的,为水下复杂任务的执行奠定了坚实的基础。
关键词:运动控制,机器鱼,三维跟踪控制,视觉识别和定位。
绪论
水环境中的自动跟踪非常适合各种实际应用,如海洋资源勘探、海底测绘和海洋救援。因此,自主跟踪和导航在自主水下机器人(auv)的发展中起着至关重要的作用[1],[2]。视觉引导跟踪具有低成本、高精度的特点,虽然容易受到非均匀光照和低质量成像的影响[3]-[6],但仍然受到人们的关注。
一般来说,水环境下的视觉引导跟踪可以分为有图跟踪和无图跟踪。在环境未知的情况下,利用映射进行跟踪适用于要求高精度的情况。然而,它具有高复杂度和资源消耗的特点。Kim和Eustice[7]提出了一种实时视觉同步定位与映射(SLAM)算法,该算法克服了视场有限和成像质量差的缺点。此外,还实现了一种视觉显著性方法来检测船舶。Lee等人。提出了一种用于视觉SLAM的单簇概率假设密度滤波方法,为AUV的跟踪任务奠定了基础[8 ]。另一方面,没有映射的跟踪是简单而有效的,这为已知环境提供了额外的便利。采用简单的线性迭代聚类方法进行图像分割。然后,利用最小邻域分类法得到目标位置,并设计鲁棒控制策略来指导auv。Park等人。设计了一个安装在对接站入口处的光学系统,引导AUV实现稳定对接[10]。
作为一种受生物启发的AUV模式,被称为机器鱼的类鱼机器人在过去几十年里受到了越来越多的关注。预计一个安静移动的敏捷机器鱼将比现有的具有刚性船体和旋转螺旋桨提供动力的水下机器人更具有竞争力。特别是配备了强大视觉系统的机器鱼,推动了auv复杂而精确的任务执行。然而,视觉引导下的机器鱼跟踪仍然具有挑战性,三维跟踪控制很少被解决。例如,Hu等人。对一条尾鳍和一对简化胸鳍的机器鱼在二维空间实现了基于视觉的目标跟踪和避碰跟踪[15]。Yu等人。针对具有多个控制面的机器鱼,提出了一种基于视觉的二维跟踪方法[16]。Takada等人。估计了单关节机器鱼基于视觉的目标定位性能[17]。
本文在前人研究的基础上,重点研究了一种具有船载嵌入式视觉的自由游动机器鱼的三维跟踪控制设计与实现。首次提出了一种完整的三维跟踪控制框架。该框架将三维跟踪控制问题分为深度控制和方向控制,使耦合控制变量最小化,保证了控制的平稳性和稳定性。本文的具体贡献在于,基于车载嵌入式视觉的深度控制和方向控制的集成,大大方便了机器鱼的三维跟踪控制,从而大大扩展了三维运动能力的范围。与以往对机器鱼跟踪控制的研究[15]-[17]相比,提出了深度控制和方向控制相结合的方法,实现了三维定位估计。值得注意的是,根据期望深度与实际深度之间伴随的深度误差,提出的模糊滑模控制器即使在模型误差和干扰的情况下也能快速跟踪期望深度。所提出的基于模型的控制框架非常适合机器鱼的实际应用。此外,改进后的跟踪方法有助于丰富传统控制理论,拓展其在快速移动机器人领域的应用。
本文的其余部分安排如下。第二节简要介绍了三维跟踪问题,并给出了系统框架。第三节介绍了三维跟踪的自动识别和定位方法。第四节详细介绍了基于模糊滑模控制的深度控制方法。第五节提出了一种多阶段的方向控制方法和一系列的控制策略,将敏捷运动和控制精度结合起来。试验最后,第七节对本文进行了总结,并对今后的工作进行了展望。
问题描述与系统框架
图1是本文研究的三维跟踪控制的原理图。惯性坐标系OXY Z的坐标原点设定在机器鱼的初始位置。轴线Oy向下垂直于表面,轴线Oz沿头部-尾部轴线向前移动,轴线Ox根据右手规则确定。三维跟踪分为基于视觉的定位、深度控制和方向控制。首先,根据视觉信息计算出入口在三维空间中的位置。在视觉定位的引导下,鱼游到入口中心的深度(即,鱼到达A点)并停留在该深度。最后,进行航向调整,鱼到达B点。当鱼瞄准入口中心时,它迅速游向目标。
三维目标跟踪的一个基本前提是机器鱼可以潜到首选的深度/稍后将详细介绍,机器鱼可以通过调整胸鳍的攻角,同时保持一定的向前游动速度来潜水或上升。因此,在深度控制中,获取稳定的图像数据是不可能的。同时,实时反馈图像数据不可靠。具体来说,目标深度是通过预先编程的视觉信息一次获得的。然后,压力传感器在深度控制期间反馈深度信息,但视觉信息的深度反馈不可用。另一方面,当鱼到达入口深度时,需要对航向调整进行相对精确的控制。它基于视觉感知的多级航向角。注意,在这个过程中,还应考虑游泳的速度。然而,要保证图像数据的稳定采集和快速游动是矛盾的。因此,有必要建立适当的控制策略,以集成控制精度和灵活的运动。
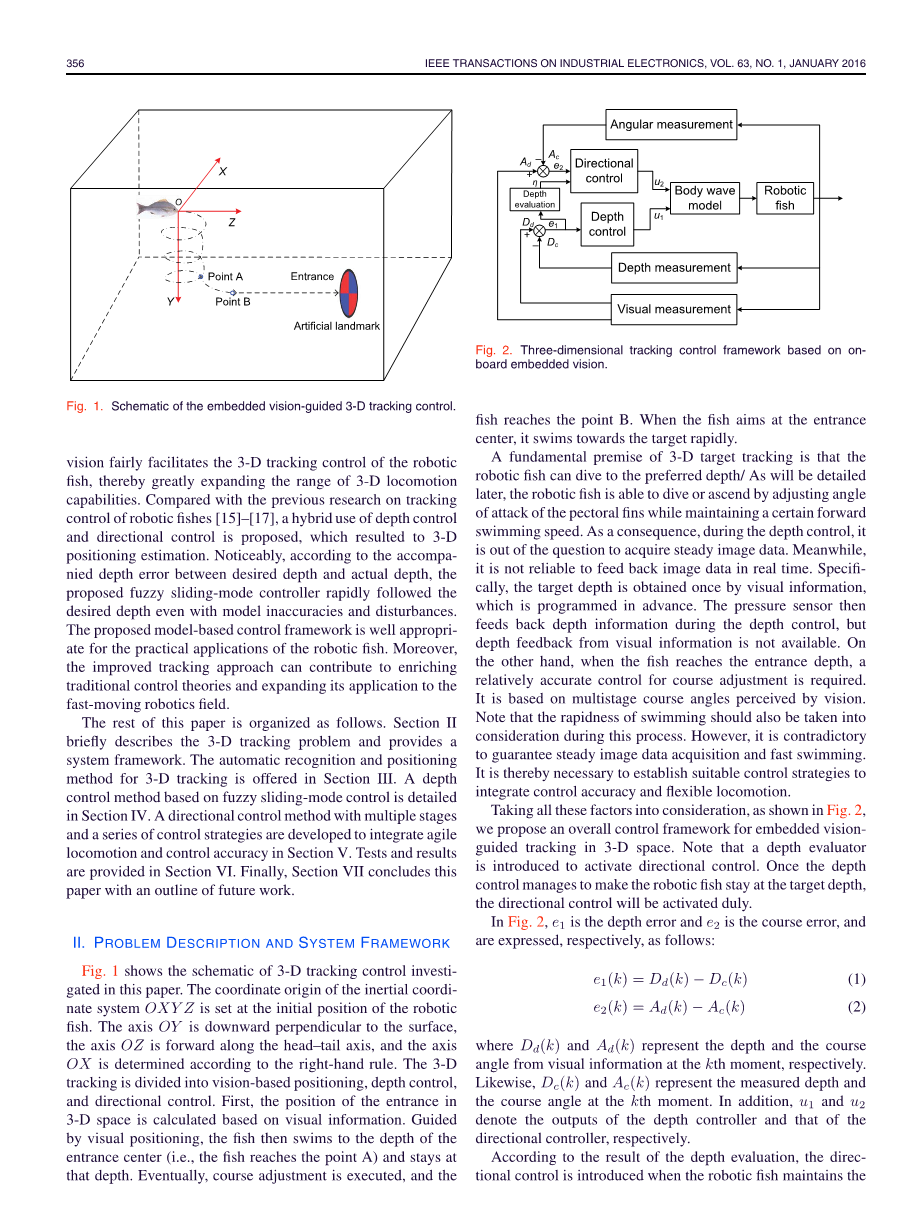
考虑到所有这些因素,如图2所示,我们提出了一个三维空间中嵌入式视觉跟踪的总体控制框架。注意,引入深度计算器来激活方向控制。一旦深度控制成功使机器鱼停留在目标深度,方向控制将被适时激活。
在图2中,e1是深度误差,e2是航向误差,分别表示如下:
(1)
(2)
其中Dd(k)和Ad(k)分别表示第k时刻视觉信息的深度和航向角。同样,Dc(k)和Ac(k)表示第k时刻的测量深度和航向角。此外,u1和u2分别表示深度控制器和方向控制器的输出。
根据深度评估的结果,引入了当机器鱼保持所需深度时的方向控制。深度评估器表示如下:
(3)
其中,eta;表示深度计算器的输出,e1Th表示深度误差的阈值,e˙1Th表示深度误差偏差的阈值。注意,只有当且仅当eta;等于1时,方向控制才被激活。
采用体波模型作为运动控制模型,生成鱼状游泳数据。传统的体波模型描述如下,最初由Lighthill[21]提出:
(4)
当YBOLD表示横向位移时,X表示沿主轴的位移,C1表示线性波振幅包络的系数,C2表示二次波振幅包络的系数;K是波数,omega;是体波的频率。
根据Liu和Hu[22],采用改进的体波模型来保证头部的稳定性[23]。修正体波方程描述如下:
(5)
其中c3是一个比例因子。它可以用来调整体波的振幅包络,以满足鱼类游泳时的振幅特性。
三、 三维空间中的嵌入式视觉定位
在水下环境中识别和定位感兴趣的目标是一项挑战。鉴于嵌入式系统资源有限,这是一种基于人工地标的视觉识别和定位的有效方法[24]。为了确保实时性和鲁棒性,如图1所示,设计了由色块组成的人工路标。注意,颜色补丁可以根据特定规则或规则集灵活排列。实际上,三维空间中的位置可以根据地标的大小来计算。
地标中心在图像平面上的位置检测有弱检测和强检测两种方法。前者的目的是检测单一颜色的红色或蓝色。单一颜色的主要成分被设置为满足松散阈值。相反,后者用于定位入口中心,这取决于不同颜色之间的强拓扑关系。对于被测试的机器鱼来说,标志性的是视野中的椭圆形。在几何关系方面,感知椭圆的长轴和短轴在入口中心处是垂直的和相交的。因此,轴检测从所获得的中心开始,然后它们可以根据不同颜色的拓扑关系来识别。
假设长轴的端点是图像平面中的(u1,v1)和(u2,v2)。长轴的长度被定义为L。在从视觉信息导出入口中心的位置之后,可以根据针孔成像模型计算出航向角AD和深度DD。图3示出了三维定位的原理,其中摄像机坐标系OcXcYcZc的坐标原点设置在摄像机镜头的中心,并且轴OCZC表示光轴。图像坐标系O1UV的坐标原点设置在图像平面中光轴的中心。f表示焦距,d表示入口和光学中心之间的距离。
假设忽略了相机镜头的失真。相机的内部参数可以表示为:
(6)
其中(u0,v0)是光学中心的图像坐标,(fu,fv)是从图像平面到相机坐标系的放大系数。此外,(fu,fv)可描述如下:
(7)
其中(SU,SV)表示轴O1U和轴O1V中每个像素的长度。
航向角Ad可计算如下:
(8)
其中(u,v)是入口中心的图像坐标。类似地,俯仰角Pd可以计算为:
(9)
针孔成像模型的几何关系如下:
(10)
其中R表示人工路标的直径。
最终,入口中心的深度可以计算为
基于模糊滑模控制的深度控制
俯仰运动分析
图4说明了机器鱼俯仰时的流体力学分析。将机器人抽象为包括鱼体杆、左胸鳍杆和右胸鳍杆的连杆结构。首先,建立坐标系。OgXgYgZg是惯性坐标系。OjXjYjZj(j=0,1,2)为连杆坐标系,其中j=0为鱼体杆,j=1,2为胸鳍杆。O0设置在机器鱼的重心,O1和O2设置在胸鳍和鱼体的交界处。OjXj沿杆J轴,OjZj沿轴线的垂直方向,OjYj由右手规则确定。
在本文中,机器鱼的潜水和浮出水面主要依靠保持一定攻角的独立胸鳍。为了简化流体动力学分析,重点将是胸鳍产生的力,而其他杆产生的沿轴O0Z0的力将被忽略。根据Kutta-Joukowski定理和理想势流理论,胸鳍FL和FR上的升力可以表示为:
(11)
其中,rho;是流体密度,AL和AR分别代表左胸鳍和右胸鳍的表面积。CL和CR分别是左右胸鳍的升力系数。它们可以表示为攻角delta;P的函数,即:
(12)
式中,phi;表示修正指数函数,即:
(13)
lambda;是无量纲时间。
因此,作用在左右胸鳍上的流体力在O0X0Y0Z0中可以表示为0FL和0FR,即:
(14)
根据刚体的转动规律,如下:
(15)
其中delta;表示机器鱼的俯仰角,J表示旋转惯量。
最终,机器鱼的深度计算如下:
(16)
式中,gamma;(t)表示游动速度,h(0)表示初始深度。
根据上述分析,可以推断深度控制是一个与游泳速度密切相关的三阶系统。注意,图像数据的实时反馈不可靠。虽然简化的俯仰分析对深度控制具有重要的指导意义,但不能作为精确的深度控制模型。此外,当鱼跳水时,挠性体的变形引起扰动(26)。为此,设计了一种用于深度控制的模糊滑模控制器。它不仅克服了模型不精确的缺点,而且抑制了俯仰过程中的干扰[27]。
深度控制器的设计
基于模糊滑模控制的深度控制如图5所示,其中基于深度误差设计滑模面。s和s˙是开关面及其导数。模糊控制器的输入为s和s˙。u˙1是胸角的导数,表示输出。ks、ks˙和ku˙1是相应的比例因子。
首先,滑动模态表面的输入计算如下:
(17)
其中T s是采样周期。
其次,开关表面根据:
(18)
其中alpha;1、alpha;2和alpha;3是正值调整因子。
最后,从设计良好的模糊控制器中得到u˙1。
- 隶属函数的设计:s、s˙和u˙1分别被模糊化为5、7和7个模糊语言值。语言值pB、PM、pS、ZE、NS、NM和NB分别表示正大、正中、正小、零、负小、负中和负大。选择正态分布函数作为隶属函数,如图6所示。
- 规则库的设计:在滑模曲面存在的前提下,设计规则基以满足SS<0。当s和s˙都被模糊化为NB时,u˙1被设计为NB,使得ss˙迅速减小。同样,当s和s˙都被模糊化为P B时,u˙1也被设计为P B。所设计的规则库如表1所示。
- 解模糊:采用重心解模糊法计算产量。
根据模糊控制器的输出,胸鳍的攻角可以确定如下:
(19)
同时,驱动信号是为后体的伺服电机预先设定的,从而产生保证机器鱼自由潜水所必需的速度。
多级定向控制的设计
再次强调了在多级定向控制中进行的深度评估。在某种意义上,下面描述的多级定向控制是在深度评估器的输出等于1的前提下进行的。
如图7所示,实现了具有多个级的方向控制。航向角由陀螺仪作为反馈测量,保证了控制系统的稳定性。方向控制中的模糊控制器由隶属函数、规则库和解模糊组成。选取标准三角函数作为隶属函数,根据经验设计ruse基,采用重心解模糊方法。具体方法见[20]。我们注意到,一方面,机器鱼的设计是为了实现高效灵活的运动。另一方面,鱼群的可操作性对稳定成像是一个障碍,这不可避免地降低了控制精度。因此,在定向控制中,应提出适当的控制策略,以综合操纵性和控制精度。基本策略如下:
- 控制的连续性和离散性:从视觉信息中感知到的航向角是离散的,而定向控制的单个过程是连续的。该控制策略基于通信协议实现多级连续控制。显然,基于图像的伺服控制被分解为相对独立和简单的控制。为了适应嵌入式芯片的处理能力,这种精细化的策略可以减少计算量。最终,可以实现方向控制的快速实现。
-
多级控制:方向控制的整个过程分为偏航和前进两个阶段。具体来说,航向角是从视觉信息中输入的,然后是角度调整。当鱼头对准入口中心时,向前游动会切换到入口快速到达。在偏航阶段,对鱼头进行稳定控制,实现稳定成像。采用(5)中描述的改进体波模型来减小头部的摆
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238143],资料为PDF文档或Word文档,PDF文档可免费转换为Word

