
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
本文研究了H型门座起重机在起重机运动和负载摆动的激励下,对承载结构动态特性的影响。介绍了结构动力学问题的重要性。根据给定的问题,建立并求解了起重机臂架和门座的动态空间模型。本文的主体部分采用有限元法和直接积分法对空间结构进行模态分析,确定空间结构的动力响应。分析了速度和加速度的变化对结构动力响应的影响。分析了臂架转角的变化对结构动力响应的影响。研究结果为门座起重机的设计和今后的研究提供了重要的依据和结论。
- 0介绍
结构动力特性的研究在机械工程和土木工程中均有涉及。各种用途的结构受到各种不同的影响。这些影响可以是常见的[1],仅在时间上是可变的,也可以是在时间和空间上可变的[2]和[3]移动荷载的影响。这些影响对结构的作用反映在结构的动力位移、速度和加速度上。
在机械工程中,这个问题首先出现在起重机工程领域。门座起重机是起重机机械的代表之一,也是本文的研究对象。这些起重机的吊臂与门座相连,可以360度旋转。这些起重机因其高承载能力和相对于其高度的较小基底而成为动力分析的有趣对象。在门座起重机中,有些影响是随着时间变化的。负载摆动对起重机的动态加载起着重要的作用。论文[1]和[4]考虑并证实了负载摆动问题的重要性。此外,这个问题的重要性在标准[5]中有定义。第一篇论文考虑了平面动力学模型,后来发表的门座起重机的动力学领域的论文主要研究了平面动力学模型[6]和[7]。本文作者利用动态空间模型研究了门座起重机[8]的动态特性。因此,从更广泛的意义上说,研究的方向是旋转起重机。首先,考虑了处理旋转起重机动态特性问题的动力学模型[9][11]。接着,对涉及旋转起重机控制问题的动态模型[12]和[13]进行了综述。
在几乎所有上述[6]到[13]的论文中,作者都将门座起重机建模为直接模型或离散连续模型。Vasiljević等人[14]展示大量一致的实验获得更精确的结果。
对门座起重机臂架的动力学模型研究较多,但对考虑承载结构的动力学模型研究较少。
根据这一事实,本文将有助于了解在起重机运动和负载摆动的激励下,门座起重机承载结构的动态特性。
解决这一问题需要对臂架和承载结构进行适当的建模。门座式起重机动力模型的建模方法是将整个门座式起重机分为承重结构和臂架两个子系统。通过减小载荷和臂架自重对门座对应点的影响,简化了承载结构与臂架之间的关系。将门座起重机的承载结构建模为空间线形梁。在实际中,空间线形梁是质量连续分布的系统,而承载结构的空间模型较为复杂。由于这些原因,连续分布的质量被一致的质量所代替。因此,系统的一致质量矩阵是基于用于刚度矩阵推导的相同的插值函数而得到的。空间线形梁采用空间梁单元建模,每个单元有两个节点和六个未知数。对所采用的门座起重机动力模型,在第一步进行了振动模态分析,为更好地了解承载结构的动力特性奠定了基础。第二步,确定门座起重机的动力响应。
- 1问题设置
振动是弹性机构和承载结构在惯性力作用下产生的。这些力作用的时间越短,振荡就越不利。
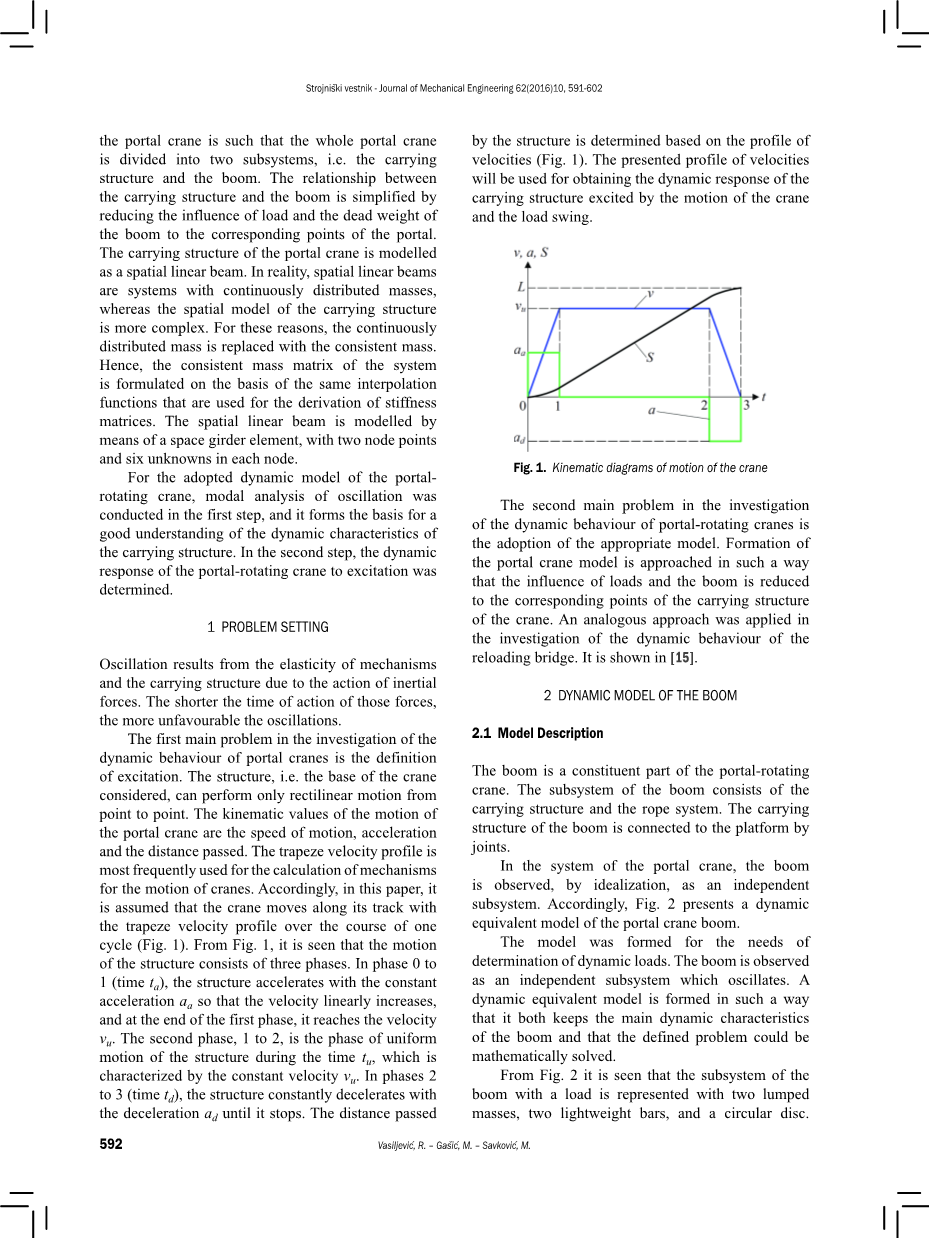
门座起重机动力特性研究的第一个主要问题是激励的定义。这种结构,即所考虑的起重机底座,只能在点与点之间作直线运动。门座起重机运动的运动学值为运动速度、加速度和通过的距离。梯形速度分布是计算起重机运动机构最常用的方法。因此,本文假设吊车沿轨道沿梯形速度分布运动一个周期(图1)。从图1可以看出,结构的运动分为三个阶段。在0~1阶段(ta时间),结构在恒定的加速度aa的作用下加速,所以速度线性增加,在第一阶段的最后,它达到速度vu。第二阶段,1~2阶段,是结构在时间tu内匀速运动的阶段,其特征是速度恒定为vu。在阶段2至3(时间td),结构不断减速,直到停止。通过该结构的距离是根据速度简况确定的(图1)。所提出的速度简况将用于获得由起重机运动和负载摆动所激发的承载结构的动态响应。
图1 起重机的运动示意图
研究门座起重机动力特性的第二个主要问题是采用合适的模型。通过将荷载和臂架的影响降至吊车承载结构的相应点来探讨门座起重机模型的形成。类似的方法也应用于重载桥的动力特性研究。它在[15]中探讨。
- 2臂架动态模型
- 2.1模型描述
臂架是门座起重机的组成部分。臂架的子系统由承载结构和绳索系统组成。臂架的承载结构通过节点与平台连接。
在门座起重机系统中,臂架作为一个独立的子系统被理想化地观察。因此,图2给出了门座起重机臂架的动态等效模型。
该模型是根据动载荷确定的需要而建立的。臂架作为一个独立的震荡子系统被观测。建立一个动态等效模型,既保留了臂架的主要动态特性,又能从数学上解决所定义的问题。
从图2可以看出,加载臂架的分系统由两个集中质量、两个轻杆和一个圆盘来表示。对臂架的承载结构进行离散化处理的是一根重量较轻的杆,杆端质量较轻。换句话说,臂架的承载结构由一根长度为Lb、质量为m1的轻型杆表示,它被简化为臂架的顶端。吊杆的绳索系统由一根长度为Lr、质量为m2的非弹性轻型杆表示,它允许负载摆动。这意味着臂架的顶端,即质量m1和质量m2,由长度为Lr的非弹性轻质杆连接。转动柱由圆盘表示,圆盘的轴向转动惯量为J,转动惯量为T。臂节与柱轴的距离为r。
图2臂架动态模型
根据[15]中的建议,可根据以下关系确定减质量m1:
其中mb为臂架质量。
- 2.2数学公式
采用第二类拉格朗日方程建立所形成的臂架动力学模型的数学公式。基于图2所示的动力等效模型,建立了臂架单元的运动方程。
系统的动态运动方程为:
其中theta;是负载在纵向方向的摆动角,psi;是负载在边(侧)的方向的摆动角,phi;是圆柱(即臂架)的旋转角,x是臂架的直线运动,omega;是负载振荡的角频率。
- 2.2.1负载振荡
根据图1所示的图给出的起重机加速度,荷载随时间沿广义坐标theta;和Psi;的非衰减振荡规律将由方程式(2a)和(2b)确定。
在第一步中,观察荷载(即质量m2)沿广义坐标theta;的纵向运动,从而将其从系统中取出,如图3所示。
图3纵向负载振荡
为了确定负载摆动的规律,粒子相对运动的微分方程,即质量m2,定义为:
将式(3)投影到与质量m2相连的自然三面体的t、n轴上。给出了获得纵向负载振荡规律的具体方法。由于这两个方向的负载振荡有相似之处,所以只给出侧方方向的最终形式。
得到纵向负载振荡规律:
在式(4)中,的关系代表了象限负载omega;2的角频率。对于小振荡的情况,可以引入角度theta;较小的近似值,从而使sintheta;asymp;theta;,costheta;asymp;1。此外,还介绍了的替换。将式(4)线性化,得到如下形式:
方程(5)最适合用拉普拉斯变换法求解。第一步,确定:
从图1的运动学图可以看出,加速度图特别适用于求解式(6)。如图4所示,它采用aa =ad= h和ta = td =tau;。对于之前的计算,可以采用0.5(ta td)=3 - 5秒。
图4加速度曲线
现在,根据图4加速度随时间的变化关系图,拉普拉斯域内的加速度表达式可以表示为:
其中h为输入加速度幅值,ti是加速度图中对应的时间步长。
式(6)得到:
最后,通过对方程进行变换,可以得到纵向负载振荡规律。式(8)通过使用拉普拉斯逆变换得到时域中的theta;(s)。
所获得的负载振荡定律(等式(9)和(10))表示具有线性多项式的赫维赛德(阶跃)函数。
当负载摆动的角度达到最高点时,负载摆动对起重机的失稳和倾覆的影响最大。这种情况发生时,时间计算的脉冲是相互同步的。在这种情况下,将累加每步加速度引起的负载振荡,并产生最大的负载振荡幅度。
方程式(9)和(10)表明,满足以下条件时出现最大振荡角:
- 方程式(9)和(10)中的每一个余弦分量同相位;
- 将等式(9)和(10)中的余弦值乘以赫维赛德阶跃函数的相应步骤,得出的值等于1 (需要有足够的运行时间,tge;t4,才能实现图中所示的加速度)。
当加速度图的四个步骤通过它们的构造性相加和完美的时间执行时,等式(9)和(10)中的余弦值是同相的。在最坏的情况下,振荡角相对于由输入一级加速度引起的振荡增加了四倍。纵向和侧向负载振荡的最大角度为:
为了产生最大的负载摆动,必须使加速度步长完全同步,即满足两个条件。
第一个条件要求第一步和第二步之间以及第三步和第四步之间的时间间隔应等于振荡周期tau;的一半:
其中n=1,2,3,hellip;
由于组中的步骤具有不同的名称,因此需要时间延迟。因此,根据相反的函数符号,时滞等价于相位延迟pi;的激发,这排除了相位变化的可能性(并使两个函数同相)。
第二个条件要求第二个和第三个脉冲之间的时间间隔必须包含多个周期tau;的时间延迟:
其中n=1,2,3,hellip;
换句话说,之所以成立,是因为第二步和第三步具有相同的符号,因此以2pi;改变相位需要第二步和第三步同相。
- 2.2.2门座的动态载荷
根据所采用的臂架动态模型的广义振动坐标,弯曲动力力矩发生在两个方向:
- 纵向;
- 以及侧向。
纵向弯曲的动态力矩如图2所示:
侧向弯曲的动态力矩如图2所示:
- 3结构有限元模型
- 3.1模型描述
整个门座起重机分为两个子系统:活动结构和臂架。简化了结构与臂架的关系,将负载和臂架自重的影响降至臂架上下支承点。
H型门座起重机的结构如图5所示:
图5 H型的承载结构(门座)
承载结构为刚性空间框架。它的基底尺寸为Ltimes;B。承载结构的主要结构部分是支腿、斜柱和上下梁。两支腿高度相同(高H),基于同一水平线上。倾斜的柱子长度相同(长度C),它们连接到支腿以及上梁和下梁。上下梁之间的距离等于H0。上梁具有起重臂的上支撑功能,由直径为D的圆环构成。下梁具有起重臂的下支撑功能,采用H型框架结构。
所考虑的门座起重机结构的有限元模型如图6所示。
图6 Eta;型结构的有限元模型
考虑到动臂绕其轴线旋转,可以得出结论,假设的平面模型不足以描述所考虑的门座起重机的动态行为。根据臂架的空间动力学模型,建立了降低动载荷的门座起重机空间模型。
对18个节点连接的有限梁单元进行了起重机承载结构的离散化处理。整个系统有82个自由度。将支腿建模为一个具有特征A1,Ix1,Iy1,Iz1的有限元。把斜柱建模为一个具有特征A5,Ix5,Iy5,Iz5的有限元。上横梁(直径为D的圆环)被分为具有特征A9,Ix9,Iy9,Iz9的四个有限元。下横梁(H型框架)被分为具有特征A13,Ix13,Iy13,Iz13的六个有限元。支承结构由四个刚度为k的弹性支承组成。
承载结构的主要力学特性,即所形成的空间模型的所有有限元的主要力学特性是弹性模量E、滑动模量G和密度rho;。动力矩方程式(14)和(15)简化为上梁和下梁中心节点的水平动力Pl(t)和Ps(t)的组合。这些力相对于纵向方向(轴线X)的位置由角度phi;定义,角度phi;表示臂架旋转角度。
动态力Pl(t)和4times;P l(t)/4构成的力的组合与平台的纵向倾覆力矩Mdyn,l相反,即在起重机的旋转部分上:
动态力Ps(t)和4times;Ps(t)/4构成的力的组合与平台的纵向倾覆力矩Mdyn,s相反,即在起重机的旋转部分上:
荷载质量m1的垂直静态力pm1减小到下梁(H型框架)的中心节点。减小的臂架质量m2的垂直静态力pm2也减小到下部梁的中心节点。作用在臂架下部支座中心节点处的总竖向静态力Pm等于荷载质量的力和减后臂架质量的力之和:
获得结构对激励的动力响应的结构模型的特征节点是弹性支撑点(轮轨接触点)处的节点。
- 3.2数学公式
根据所建立的门座起重机数学模型,动态平衡的微分方程即承载结构的强迫振动如下所示:
其中[M]是系统的质量矩阵,[K]是系统的刚度矩阵,是承载结构的广义坐标加速度矢量,{U}是结构的广义坐标位移矢量,是结构节点的外部荷载向量。
等式(19)用于研究由于起重机的运动而引起的结构的动力响应。将其分解为未知和已知位移方向的主动力和惯性力的平衡条件,从而得到:
由于支座在水平方向上的位移和加速度均为零(Uk = 0, = 0),则由式(20)得到:
通过求解代数方程得到结构的固有频率:
在未知位移的方向上,整个系统的质量子矩阵等于门座起重机的承载结构矩阵:
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[236343],资料为PDF文档或Word文档,PDF文档可免费转换为Word

