
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
2010年5月24日至28日,克罗地亚奥帕蒂亚
基于Hinfin;控制理论的门座起重机的控制系统设计
伊万·布鲁尔,费塔赫·科洛尼,Jadranko Matuscaron;ko电机、驱动和自动化系电气工程和计算学院Unska 3,萨格勒布,克罗地亚
电话: 38516129824传真: 38516129705
ivan.burul@fer.hr, fetah.kolonic@fer.hr, jadranko.matusko@fer.hr
摘要-本文描述了一种基于Hinfin;平动机电一体化系统的控制理论。其目标是实现快速小车定位,并使摆锤摆动最小化。这个系统,带摆的小车,代表门式起重机。在起重机应用中,最大限度地减少负载转移时间和负载摆角是相互矛盾的控制要求,因此需要适当的控制措施。然而,摩擦效应在系统的机械部分是不可避免的,对控制系统的性能有着重要的影响。在这篇论文里Hinfin;为了减小摩擦效应,设计了基于理论的起重机控制器。Hinfin;在实验室门式起重机模型上,对控制器进行了测试,并与极点配置控制器进行了比较。
Ⅰ.介绍
在现代工业系统中,门式起重机广泛应用于重载运输[1][2]。起重机运动所需的加速度会导致不良的负载摆动,对系统控制和安全性能产生负面影响。除负荷位置外,为了使负荷摆动最小,有必要控制负荷摆动角度。为了提高控制效率,还应控制小车位置和摆角的变化。对于移动起重机的防摆控制,有模糊控制、最优控制等几种方法,如果对象模型是精确的,则每种方法都是有效的[3][4][5]。然而,在实际应用中,要建立准确描述被控对象特性的模型是不可能的。此外,不可能完全隔离受控对象与其环境的不希望的影响。这些影响通常表示为外部干扰,其影响需要通过控制器动作最小化。典型的摩擦效应会显著降低机电控制系统的性能。由于其非线性摩擦特性,使得起重机控制系统无法实现精确定位,传统的方法无法通过在控制器中加入积分项来解决这一问题。此外,积分作用可能导致粘滑运动的不期望的非线性效应[6]。解决摩擦问题的一种方法是产生附加控制以补偿摩擦效应。然而,这种方法还需要基于部分或完全已知的摩擦模型设计摩擦观测器。第二种方法使用高频偏置信号注入。虽然它可以减轻摩擦效应,但也可能在系统中激发高频谐波。本文用Hinfin;设计了基于理论的控制器,使控制系统对摩擦效应不敏感。这种方法通常确保最小的系统安全性和性能,尽管建模不准确和未知干扰。在这个意义上,摩擦效应被认为是一个未知的输入扰动,其影响将通过适当的控制作用最小化。本文的结构如下。在第二节Hinfin;背后的主要思想提出了基于控制器的设计方法。第三节描述了龙门起重机的过程,而第四节介绍了防摆控制器的设计过程,Hinfin;基于控制器的设计见第五节。
Ⅱ.Hinfin;基于控制
Hinfin;基于控制是一种现代控制方法,它为反馈控制系统的设计提供了一个系统的过程。它通常基于Hinfin;的最小化一个或多个选定传递函数的范数。那个Hinfin;传递函数的范数是其频率响应的峰值,而对于MIMO系统Hinfin;范数定义为相应频率响应矩阵的最高奇异值。
(1)
从这个意义上说Hinfin;基于控制系统的设计基本上是频域系统设计。因此,有必要将控制系统规范转化为对频率特性形状的要求。通常,三个传递函数/矩阵在这种控制器设计方法中起主要作用(根据图1定义):
·开环传递函数L:
(2)
· 灵敏度函数S:
(3)
·互补灵敏度函数T:
(4)
图1反馈控制方案
这些传递函数的作用可以从以下方程式中看出,这些方程式直接从图2中导出:
, (5)
, (6)
其中,以下身份是显而易见的:
S T=I. (7)
方程(6)表明,灵敏度函数是一个性能指标:灵敏度函数越低,跟踪误差越小,因而性能越好。结果表明,在同时考虑模型不确定性的情况下,当T满足时,得到了存在乘性不确定性时的稳定性(即鲁棒稳定性),这时在每个频率上等于乘法不确定度的大小,[7]。因此,为了得到稳定的闭环系统,在模型不确定度较大的频率范围内,应使T变小。方程(5)也表明了这一点,它表明小T导致小输出y(因此,小增益控制器不太可能导致不稳定)。
这样,在小灵敏度函数S和小互补灵敏度函数T之间进行折衷,以获得良好的性能和鲁棒稳定性。约束(7)表明它们不能在同一频率下同时变小。因此,目标是设计一个控制器,该控制器在感兴趣的频带内具有低灵敏度函数S,而在该频带外具有低互补灵敏度函数T。
- 加权函数作为闭环传递函数的上界
通过包含加权函数在Hinfin;控制问题上,设计人员可以根据设计要求来设计闭环传递函数。
当是设计器指定的权重函数时,让成为S量级的期望上限。所要注意的要求:
(8)
相当于:
(9)
或:
(10)
这些方程说明了灵敏度函数S上界的规定如何导致Hinfin;上的条件加权灵敏度。
B、 形成不同的闭环函数:混合灵敏度
上一小节解释了如何通过使用性能权重函数来指定灵敏度函数S的上界。然而,由于控制设计总是在性能和鲁棒稳定性之间进行权衡,因此需要考虑其他要求;例如,要求T在感兴趣的频带之外很小。为了将这些对不同闭环函数的要求结合起来,可以采用所谓的混合灵敏度方法。在这种方法中,指定关于S的上界和关于T的上界的总体要求如下:
. (11)
在选择要考虑的不同闭环函数及其加权函数后,通过求解问题得到Hinfin;最优控制器:
, (12)
K
其中K是稳定控制器。
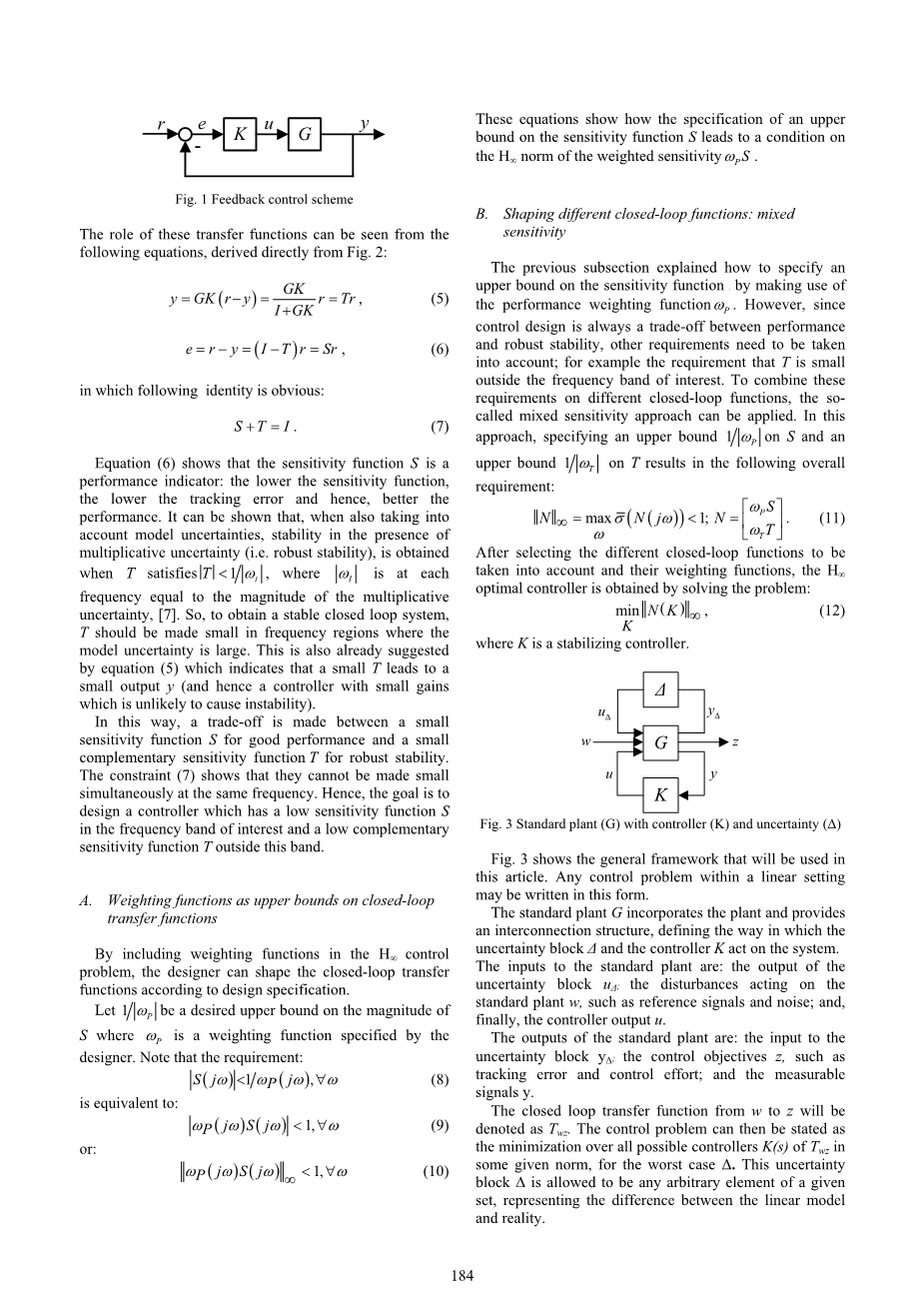
图3带控制器(K)和不确定度的标准装置(G)
图3显示了本文将使用的一般框架。线性设置中的任何控制问题都可以用这种形式来写出来。
标准工厂G包含工厂并提供互连结构,定义不确定块的方式和控制器K作用于系统。标准装置的输入是:不确定度块的输出;作用于标准设备w的干扰,如参考信号和噪声;最后,控制器输出u。
标准装置的输出是:不确定度块的输入;控制目标z,如跟踪误差和控制力;可测量信号y。
从w到z的闭环传递函数将表示为Twz。在给定的范数下,在最坏的情况下,控制问题可以表述为对Twz的所有可能控制器K(s)的最小化。这个不确定块允许是给定集合的任意元素,表示线性模型与实际之间的差异。
为了能够在一些约束条件下优化某些设计目标(通常是性能),例如鲁棒性和噪声灵敏度降低(事实上反映要优化的目标的权重函数),标准设备可能依赖于一个自由参数。
通过定义当一个或多个设计目标的需求增加时增加,Hinfin;控制设计问题可以定义为寻找最大的存在控制器K(s)其中:
(13)
(13)的一个重要结论是不确定性的无穷范数必须有界。否则,找不到解决方案[9]。
如果不存在不确定性块,则可根据两个代数Ricatti方程的解直接计算解。这个解决方案已经在软件包MATLAB中实现,使用了Glover和Doyle[8]给出的算法的一个小的自适应。
Ⅲ.龙门起重机工艺说明
简化的单台门式起重机模型如图4所示,其中xc为小车位置,xp和yp确定摆锤质心位置,Mc为小车质量,Mp为摆锤质量,是摆的摆角,Fc是作用在小车上的外力。零摆角,对应于一个悬挂的摆锤垂直向下静止的位置。
图4.单摆门式起重机系统
运动的数学方程可以通过拉格朗日方程来定义。非线性运动方程由以下方程组组成[10]:
(14)
(15)
对非线性单台门式起重机模型进行线性化,得到以下状态空间线性模型P:
(16)
(17)
在这里:
=1.5216
和:
A、 摩擦模型
由于不确定度模型不适合将摩擦效应纳入标准设备设置中[9],因此需要使用替代解决方案。减小摩擦影响的常用方法是构造扰动观测器。在这种情况下,一个额外的状态被添加到控制器中,以便能够估计摩擦力。其结果类似于Davison[11]对恒定干扰输入信号的伺服补偿方法,该方法使用额外的动力学来描述该信号。
为了能够将摩擦现象纳入到标准的工厂设置中,但不需要添加动力学,将干摩擦力建模为外部干扰力。因此,如图5所示,添加到标准装置P的干扰输入Ftr。
Ⅳ.控制器设计
如图5所示,那个Hinfin;控制系统的设计是为了跟踪参考信号并对摩擦具有鲁棒性。从图上可以看出,小车的位置、摆角有四个参考信号,对于摆角,对于直线小车速度,和对于角速度。由于该系统的目标是使摆锤的摆动最小化,因此角度的参考值始终为零。另外,由于在稳定状态下,线速度和角速度的值都为零,所以它们的参考值将为零。这样,控制器K接收四个误差信号e,并为过程P提供控制信号u。在过程的入口,除了控制信号u之外,还有代表摩擦力的主动和干扰信号Ftr。
图5Hinfin;控制系统框图
测量噪声加在被测量信号(位置和角度)的反馈中,但测量噪声不作用于被估计的信号(线性和角速度)。
图5中的系统是最终看起来的系统,当Hinfin;控制系统的优化计算控制器。但在此之前,系统应在开环(无控制器)中描述为:
(18)
式中:v—由干扰、命令等组成的外部输入,而控制信号被放置在一个单独的矢量中以便区分,
e—转发给控制器的误差信号,
z—加权性能变量,可以是状态、输出、控制、误差信号等的任意组合,
u—控制信号,也由系统定义。
图6中的系统具有六个输入和五个输出。信号定义如下:
(19)
而开环系统矩阵G由方程(20)给出。
图6开环Hinfin;控制系统框图
- 重量的选择
通过改变加权函数可以实现不同类型的控制器。为了获得快速工作的控制器,定位信号z1应该具有更大的权重。这当然会导致小车更快的定位,但会有更大的摆动。有可能设置速度信号的权重,线性和角度。信号z3的线性速度是整个时间保持在零,因为他的参与进一步复杂的系统,其参与只能减慢系统。但是,如有必要,信号z3也可以包括在设计中。由于角速度z4的信号进一步有助于保持摆角接近于零,所以也考虑了它。
(20)
加权函数W1、W2、W3和W4是与稳态特性和快速响应相关的权重;Wu是与稳定性相关的权重;Wr1、Wr2、Wr3和Wr4是与参考输入相关的权重;Wtr是与扰动(摩擦力)相关的一个权重,并基于上述思想选择以下权重。
选择加权函数W1作为与频率相关的加权函数:
(21)
由于系统是稳定的(存在Hinfin;最优解保证了系统的稳定性,从而保证了摆的速度(直线和角度)和摆角的稳态误差为零。
(22)
确定互补灵敏度函数T的加权函数Wu被选择为:
(23)
一系列实验表明,对于这种选择权函数的系统,当确定摩擦力的权函数Wtr选择为:
. (24)
测量噪声Wn的加权函数选择为:
(25)
在本文中,参考信号没有加权,因此它们的加权函数被设置为值1。
Ⅴ.实验结果
设计的Hinfin;在单台门式起重机的实验室模型上对控制器进行了实验测试。Hinfin;的表现与传统的极点配置控制器进行了比较。
图6和图7所示的结果清楚地显示了Hinfin;控制器与极点配置(PP)控制器的比较。两种情况下的上升时间tr几乎相同(约2.5s)。另一方面,用Hinfin;控制器几乎为零,而极点配置控制器的稳态误差为9%。
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[236341],资料为PDF文档或Word文档,PDF文档可免费转换为Word

