
英语原文共 7 页,支付完成后下载完整资料
Strojniski vestnik - 机械工程学报58(2012)5,338-344
论文获得者:2010-06-08,论文被接受:2012-03-14copy;2012年机械工程学报。版权所有。
D0l:10.5545/sv-jme.2010.127
用于船岸起重机的防摇系统
Edvin Raubar1* - Damir Vrancic2
1 Luka Koper,dd,Slovenia
2 Jozef Stefan Institute, Slovenia
摘要:所有船到岸起重机提升机构均由通过提升绳索连接到手推车的负载制成。在装载和卸载船舶的过程中,小车沿着吊杆将载荷从船舶移动到岸上,反之亦然。在运动过程中,提升机构结构使负载绕垂直位置摆动。负载摆动增加了装载/卸载时间并增加了与其他物体碰撞的可能性,例如附近的容器,用于处理材料的铁结构(例如沙坑)等。负载的摆动无法避免,但可以通过使用适当的防摇摆系统从根本上减少摆动。
本文基于科佩尔港巴拿马型船岸起重机的参数,推导出起重机载荷的非线性和线性化动力学模型。在上述动态模型中将三个开环防摇系统的响应进行比较。仿真结果表明,三种系统均显著降低了负载摆幅,但只有基于零振动导数和零振动导数导数方法的系统才能完全满足给定的要求。
关键词:船到岸起重机,负载振荡,防摇系统,开环系统
0介绍
为了保持与其他北亚得里亚海港口的竞争力,永久提高船对岸起重机的生产率在科佩尔港显得非常重要。通过减少转运时间可以提高生产率。提高生产率的一种可能方法是使用防摇摆系统,这可以有效地减少负载振荡。减少振荡会提高转运速度,并连续提高船到岸起重机的生产率。
本文得出了起重机载荷的动态数学模型,并附有限制。三个开环防摇系统在上述动态模型上进行了比较,参数取自科佩尔港巴拿马型船岸起重机的技术规范。
起重机没有集成防摇系统,因此操作员必须等到负载振动完全取消,然后才能将负载定位到船上所需的位置或卡车。使用科佩尔港的船对岸起重机在卡车上定位载荷时的最大可接受偏差为0.1米,相当于0.01弧度(0.57°)的角度偏差。
通常,防摇系统分为两大类:开环系统和闭环系统(见图1和图2)。闭环系统基于当前负载角度偏差,小车位置及其速度(由附加传感器测量)的反馈信息。开环系统通过应用前馈动作来运行。他们预见到错误并试图在它发生之前将其消除[1]。
在本文中,开环系统将在科佩尔港的巴拿马型船对岸起重机模型上进行测试。
本文由三部分组成。在第一部分中,导出了船到岸起重机负载振荡的非线性和线性化数学模型。在第二部分中,介绍了三种防摇系统。在第三节中的表现和比较和评估所有三种方法的时间响应。结论将在第四部分给出。
图1.开环(前馈)防摇系统的方框图(Block diagram of open loop(feed-forward)anti-swaysysytem)
图2.闭环防摆系统的方框图(Block diagram of closed loop anti-sway sysytem)
1建模
只有当外力通过提升绳索时,手推车(见图3)才能行进。该力使手推车进行加速或减速运动。与其他力相比,钢轮和钢轨之间的运动力非常小,因此被忽略了。
提升绳索的长度是不会随时间的变化而变化的,因为操作者不会同时移动模具和提升。提升绳索的长度也不取决于负载质量。可以将拖钓装置和载荷视为点质量,其仅在两个维度上移动(xy坐标平面)。
施加到手推车的力由操作员管理。通过使用操纵杆,操作员定义所需的小车速度。有关所需小车速度的信息被发送到变频器,变频器控制电机的速度。电动机通过齿轮将绳索卷绕或卷绕在鼓上并在小车上产生力。当小车加速时,该力为正,当小车减速时,该力为负。
使小车加速或减速的力总是大小相同,但改变方向,这取决于所需的速度。
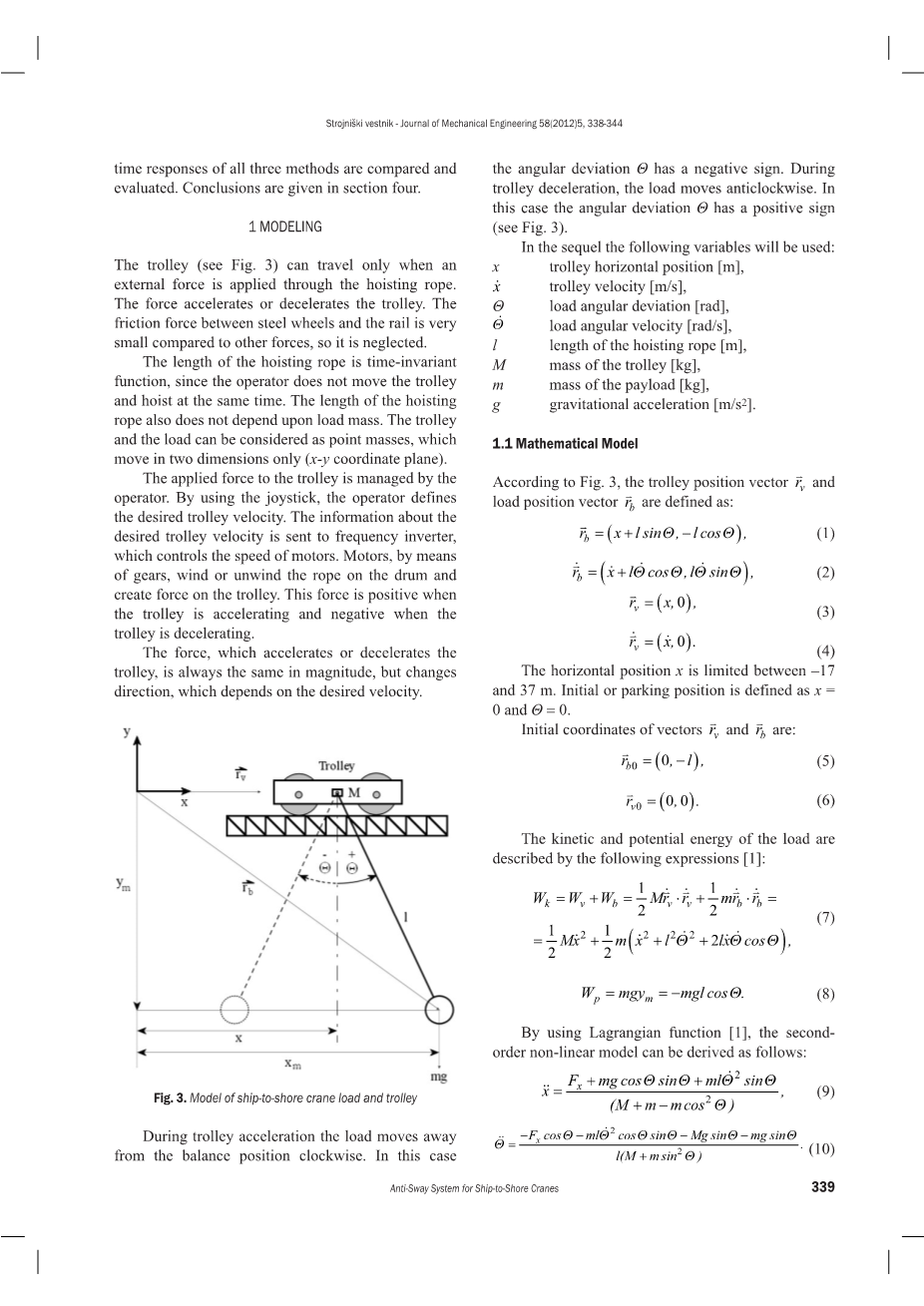
图3. 船到岸起重机装载和小车型号(Medol of ship-to-shore crane load and trolley)
在小车加速期间,负载顺时针移动离开平衡位置。在这种情况下角度偏差并有负号。在小车减速期间,负载逆时针移动。在这种情况下,负载角度偏差Theta;具有正负号之分(参见图3)。
在续集中,将使用以下参数变量:
x 小车水平位置[m],
x' 小车速度[m / s],
Theta; 负载角度偏差[rad],
Theta;' 负载角速度[rad / s],
l 提升绳索的长度[m],
M 小车的质量[kg],
m 有效载荷质量[kg],
g 重力加速度[m / s2]。
1.1数学模型
根据图3,小车位置矢量rv和负载位置矢量rb 定义为:
rb =(x lsinTheta;, -lcosTheta;), (1)
rb=( x' lTheta;'cosTheta;, lTheta;'sinTheta;), (2)
rv=(x,0), (3)
rv'=( x',0). (4)
水平位置x限制在-17到37米之间。初始或停车位置定义为x = 0和Theta; = 0。
矢量初始坐标rv和rb为:
rv =(0,-l), (5)
rb=(0,0). (6)
荷载的动能和势能用以下表达式描述[1]:
Wk=Wv Wb=1/2Mrv '* rv' 1/2mrb'* rb'=1/2M x'^2 1/2m(x'^2 l^2*Theta;' ^2 2l x'Theta;'cosTheta;), (7)
Wp=mgym=-mglcosTheta; (8)
利用拉格朗日函数[1],可以得到如下的二阶非线性模型:
x''=(Fx mgcosTheta;sinTheta; mlTheta;'^2sinTheta;)/(M m-m*cos^2Theta;) (9)
Theta;''=(-FxcosTheta;-mlTheta;'^2cosTheta;sinTheta;-MgsinTheta;-mgsinTheta;)/l*(M m*sin^2Theta;) (10)
1.2线性化模型
公式(9)和(10)描述了非线性模型。非线性模型可以通过使用某些假设来线性化[1]。第一个假设是在小车运动期间负载摆动角度很小。基于该假设,可以通过使用泰勒级数的第一项来完成正弦和余弦函数的扩展:
sinTheta;=Theta;-Theta;^3/3! Theta;^5/5!- Theta;^7/7! hellip;asymp;Theta; (11)
cosTheta;=1-Theta;^2/2! Theta;^4/4!- Theta;^6/6! hellip;asymp;1 (12)
将公式(11)和(12)代入公式(9)和(10),得到两个变量的两个微分方程:
Theta;''=-[(M m)gTheta;/Ml Fx/Ml], (13)
x''=mgTheta;/M Fx/M. (14)
1.3线性化模型的验证
为了验证线性化模型,通过仿真比较了线性化和非线性模型对相同输入信号的响应。输入信号由阶梯函数生成,表示小车上的力。模拟参数在表1中给出。它们对应于科佩尔港的巴拿马型船到岸起重机的实际参数。
表1.信号模拟中使用的参数
|
手推车的质量 |
M |
25t |
|
有效载荷的质量 |
m |
30t |
|
提升绳索的长度 |
l |
10m |
|
小车最大速度 |
vv |
2m/s |
|
小车最大加速度 |
av |
0.3m/s^2 |
|
重力加速度 |
g |
9.81m/s^2 |
|
作用在小车上的力 |
Fx |
20kN |
从图4中可以看出,在小车上的力被撤销之后小车不能均匀地行进,因为附着的负载以其自身的固有频率摆动。这会导致手推车的轻微加速或减速(取决于角度偏差和Theta;)。从图4可以看出,线性化和非线性模型之间存在非常小的差异。公式(11)和(12)中的假设由于摆动角度小而正确。
图4. 系统对脉冲输入激励信号的响应(System response to impulse input excitation)
2.1主要工作原则
将用于减少振荡的所有方法都产生抵消其自身振荡的输入信号。最简单的方法是所谓的零振动(ZV)整形器,它由两个脉冲组成。启动系统振荡的第一个脉冲位于时间零点,第二个脉冲延迟半个振荡周期。由第二脉冲引起的振荡与第一次振荡不同步,从而消除它(见图6)[2]。
输入信号可以用任意数量的脉冲整形。然而,振幅和时间瞬间应该来自系统的固有频率,阻尼比和下面的约束条件[2]:
bull; 在施加最后一个脉冲之后,必须取消振荡(零残余振动约束),
bull; 幅度之和必须等于1(单位幅度求和约束),
- 对于第N个脉冲的二阶系统响应的导数必须为零(鲁棒性约束),
- 必须计算脉冲的时间瞬间,以便获得最小的系统响应延迟(时间最优性约束)。
图5.具有两个脉冲的系统响应;第一个脉冲产生振荡,而第二个脉冲则抵消它们(System response with two impulse generates oscillations, while the second impulse cancels them out)
2.2约束方程的数学公式
下面的等式描述了二阶欠阻尼系统的脉冲响应[3]:
y(t)=[A*omega;0*e^-zeta;*omega;0*(t-t0)/radic;1-zeta;^2]*sin[omega;0*radic;1-zeta;^2*(t-t0)]. (15)
其中A是脉冲的幅度,t0是脉冲时间,omega;0 是欠阻尼固有频率,zeta;是阻尼比。第N个脉冲的二阶系统响应可以写成[4]和[5]:
y(t)= sum;Bj*sin[omega;0radic;1-zeta;^2(t-tj)], (16)
Aamp=radic;V1^2 V2^2, (17)
V1=sum;Bj*costheta;j, (18)
V2=sum;Bj*sintheta;j, (19)
Bj=Aj*omega;0*e^-zeta;omega;0(tN-tj)/radic;1-zeta;^2, (20)
theta;j=omega;0* tjradic;1-zeta;^2, (21)资料编号:[3172]

