
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
《信息科学》
《一个快速和稳定的对3D点云配准局部描述器》
摘要
这篇文献提出一个新颖的以局部特征为基础的描述器,现称为LFSH,作用于高效的3D点云配准。这个LFSH对局部图形形状有全面的描述。它用的编码数据是局部深度,点密度和两个原体之间的角度。LFSH描述器的子特征是低维的和非常有效地计算的。另外的,一个优化的采样一致算法(OSAC)从点云结果中递归地估算出最优转化值。OSAC能就解决有挑战性的案例—自相似的例子。以LFSH和OSAC为基础,一个粗配准到精配准的新算法能在3D点云配准中形成。在最领先的描述器中,实验数据和对比证明了LFSH是非常有辨识力的,稳定的和明显地比其他描述器快的。同时,这个被提出的粗配准到精配准算法被证明是稳定的,当它遇到普遍的叼钻例子,包括噪声和多种点云分辨率,和它在模型数据和场景数据上都能实现高精度。
关键词:局部特征描述器,3D点云配准,点云结果,自相似模型,特点匹配。
1,引言
在3D扫描设备上,点云的配准是基本的问题当使用3D电脑版本。许多应用已经发展完善,包括3D建模,对象识别,位置估算,面部识别,和表面排列。它的目标是把不同视角的数据转化到一个协调的系统,这系统是在模型还原和位置估计上是最优化的。这是个具有挑战的任务,有下列困难:未知的输入数据的初始位置,未加工的噪声数据,多种点云分辨率(点云密度),和两个模型的部分重叠。因此,更多的研究需要去改善实际应用中配准方法的表现。
一般地,点云配准方法能够分为3类,基于贪心算法;基于全局特征算法,和局部特征算法。贪心算法从源点云数据随机地选取几个点(经常是3个),和找到对应的点从目标点云数据,基于全面的对目标点云的探寻。考虑全部可能的配对,这个方法保证了高精度的解决方法,但经常让电脑负荷变重,特别对高分辨率的数据。全局算法和局部算法都包括这两个步骤:粗配准和精配准。粗配准目的是在源点云和目标点云中估计一个初始的转化。它的实现是通过特征匹配,和产生点到点的结果。排列的后果是通过递归接近算法(ICP)深入地或者它的变体提取点云。粗基准的必要性能被证明两个方面:首先,ICP算法以初始猜测为起点开始它对点云转化的刚性估计。如果两个点云在空间上不接近,ICP算法无法得到局部最小值;然后,一个好的初始转化能显著地改善ICP算法的在计算机上的效率。在全局特征和局部特征算法之间的主要不同是他们使用的3D特点。全局算法描述了整个模型形状,而局部特征仅对特征点的相邻特征进行编码。因为全局特征不能全部包含在重叠的区域上,所以它的独有能力被限制。对比全局算法,当排列重叠的点云时,局部算法会更合适。
在局部算法中,局部特征描述器起到了一个关键的作用在特征匹配上。一般地,一个好的特征描述器应有很好的描述性,为了提供一个能被理解的和没有歧义的局部形状的表述。为了保证高精度和高效率的特征匹配,特征描述器也应在计算机上高效,紧凑,稳定,当它面对普通的叼钻例子,例如噪声和多种点云分辨率。现在,很多局部特征描述器已经被提出来,包括point signature,spin images,fast point feature histograms(FPFH),signature of histograms of orientations(SHOT),rotational projection statistics(RoPS).读者可以参阅最近的研究,看更多的细节。这些局部特征描述器按照他们的局部指向框架(LRFs)可以被分类。特点描述器没有局部指向框架经常计算局部几何数据例如,法线,曲率。它们很容易计算,但总是遇到低描述性的问题。作为对比,有局部指向框架的特征描述器,例如在[23,26],把邻近点在空间上的分布用定义好的LRF编码。大多数的以LRF为基础的描述器,例如spin images和RoPS,提高相当详细的对局部形状的描述。结果是,他们有高维的特征载体,和需要另外的计算时间。另一个挑战的问题是为大多数的平面和球面搭建一个单独的LRF是困难的。另外,很多以LRF为基础的描述器对表面噪声和分离体不是很稳定。然而,在刚刚的情况中,没有LRFs的特征描述器表现得更好。综上,在3维点云配准局部特征描述器中,有效率的和稳定的描述是非常重要的。
在文献中,有很多有效的代表作当向局部形状几何编码时,包括局部深度和点云密度。大多数现有的努力聚焦于用2维或1维代表(比如spin images或者FPFH)描述局部特征,因此会有限制的描述性和/或者差的稳定性。在这里,我们提出一项分析和编码一些典型局部几何特征和收集他们到一个新的描述器的研究。特别地,我们运用这3个几何特征:点云密度,局部深度和法线偏离角。这能创造一个有效的和高效的局部特征描述。作为一个新的范例,多视角学习引进一个函数去塑造一个特殊的视角,然后共同优化所有的函数去结合多个来源特征到单个特征。他最近一直受到关注。然而这些能区别的特征理想地出现频繁在3D数据能够被了解的时候。因此我们直接地连结这三个子特征到新的描述器,运用我们的方法。这似乎是一个流行的操作,然后我们运用它到3D点云配准上。
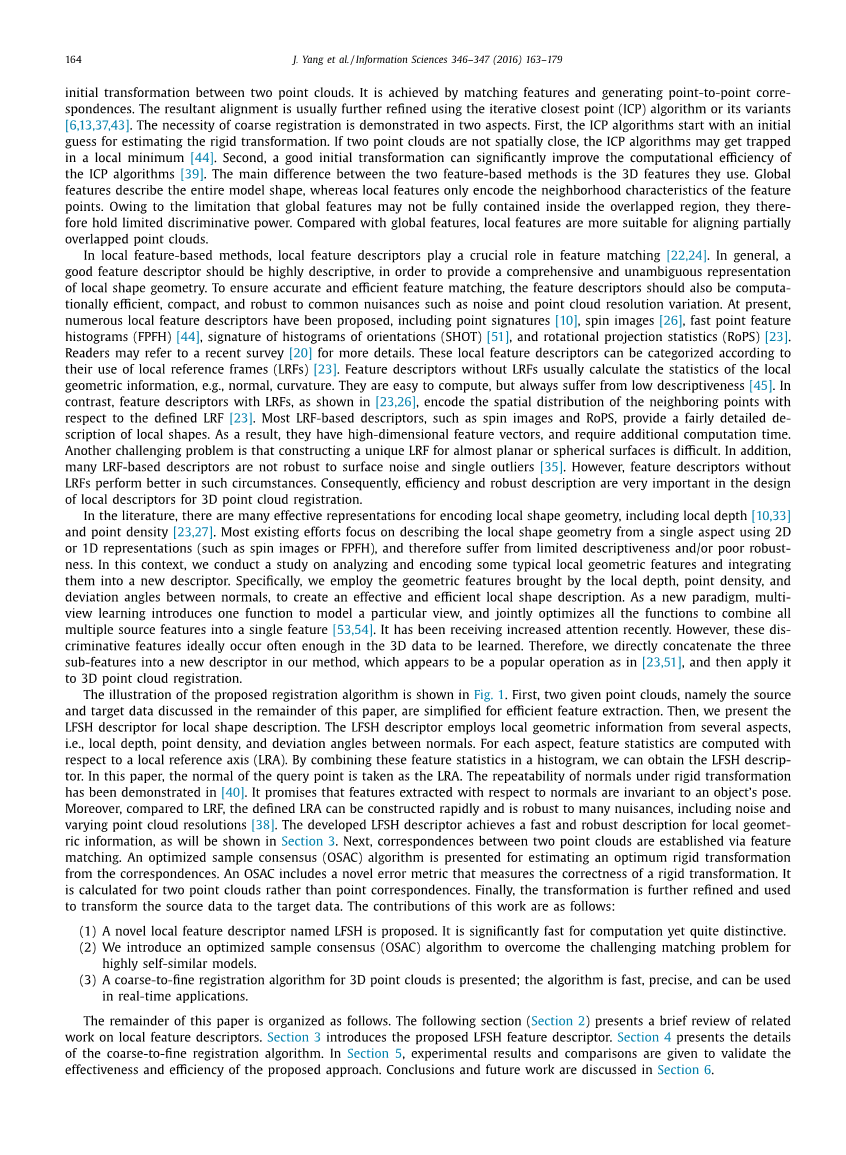
我们提出的配准算法的图解在Fig.1上。首先,两个给定的点云,分别叫源点云和目标点云,会在我们文献的剩下部分讨论,能通过高效的点云抽取被简化。然后我们把LFSH描述器表现为局部形状描述。这个LFSH描述器从这几方面——局部深度,点云密度和法线偏离角,运用局部几何信息。对每个方面,特征数据被计算时对局部指向轴(LRA)有重视。通过结合这些特征数据到柱状图中,我们能获取LFSH描述器。在这篇文章中,查询点的法线被当作LRA。在刚性的转化中法线的可重复性已被证明在[40],这保证这特征能被提取,同时就一个物体位置的变动而言,法线是不变的。更多的,对比于LRF,定义好的LRA能被快速地建立和它是稳定的对很多叼钻的例子,包括噪声和多种点云分辨率。已经发展好的LFSH描述器实现了对局部几何信息的描述,这将会在section 3被展示。之后,两个点云产生的结果将会被建立通过特征匹配。OSAC将会估计一个优化的刚性转化后呈现出结果。一个OSAC包括新颖错误米制单位去测量刚性转化的正确性。它是从两个点云中计算结果而不是从点云匹配后计算结果。最后,转化会被更加精细地定义和被用来从源数据转化为目标数据。这些工作的贡献如下:
- 一个新颖的局部特征描述器叫被提出来了,它明显地计算得快而且非常与众不同。
- 我们介绍一个OSAC算法去克服有挑战性的匹配问题——高度自相似模型
- 一个对3D点云粗到精配准算法被提出,这算法快,精确,能在实时操作系统中被运用
文献剩下的部分被组织如下。下面的部分呈现一个简短的评价对局部特征描述器Section 3介绍了被提出的LFSH特征描述器。Section 4呈现了粗到精配准算法的细节。在section 5,实验性的结果和对比给出来证实被提出来的方法的有效性和效率。
结果和将来的工作将在section 6被讨论。
Fig.1 三维点云算法的图解(为了好辨别,源点云用红色展示,目标点云用绿色展示,在文献剩下的部分)(为了颜色能够被读者看到,读者需要使用web版本阅读这篇文章。)
2.相关的工作
无数对点云的研究已经进行。在这些方法中,完善的配准方法,例如ICP,已经能够完成相当精确的结果。真正的3维点云的挑战存在与粗配准的过程。因为我们的方法是局部特征方法,所以大多数相关的方法在这部分都会被呈现。
Stein和Medion[8]提出一个引起轰动的描述器,它能把查询点和它的几何邻近点编码,使用LRF;这关系被储存到3D向量中,这向量最后要转化城曲率和扭转角。Chua和Javis[9]放置一个球,它的中心是查询点,去得到等高线,通过分隔表面。后果是,等高线上点到切平面(在查询点上)的距离和从离散的数据中得到的顺时针的扭转角,这形成了点的独有特征描述器。因为只有在同一个等高线上的点被考虑,所以这两个描述器的描述性都被限制了。Johnson和hebert[10]提出了spin image描述器为了3D表面的匹配,这对噪声很稳定但计算的代价很大,和对网格化分辨率的变化很敏感。他们首先规定查询点的法线为参照轴,和凸现邻近点,通过2维坐标的支承角。一个中间地带的图像在那时候会用2D数组累加器产生。几个spin image演变算法被提出来去减少特点抽取的时间的花费和改善它的描述性。例子包括基于面部的spin image[11]算法,一个球形spin image[12]算法,一个多分辨率的spin image[13]算法和一个sign image签名[14]。相似的,snapshot[15]和log polar height map(LPHM)[16]描述器也代表了2维图像排列。不像用在spin image的点云密度,这两个描述器主要地描述了局部深度信息和被证明是更多的有辨别力的,比起spin image来说。Sun和Abiqi[17]提出一个网格圆形包围查询点和凸显这些圆形在查询点的切平面上,这形成了“点的指纹”描述器。因为更多的等高线会产生,“点的指纹”包含更多有区别性的信息,比其他方法只使用等高线(例如point signature)或2维柱状图(例如spin images)。
之后,frome et al.[18]提出一个3D形状背景的描述器,这是2维形状背景方法[19]。他们把不同半径的邻近点分到柱状图和数出每个柱子点的权重是多少。Gelfand et al.[20]提出一个体积积分描述器;他们计算以查询点中心的一个球被内部表面分割后各部分的体积。这个体积积分描述器是低维的和对噪声稳定,然而它限制了描述性,因为仅仅表面体积特点被编码。Flint et al.[21][22]引进了THRIFT描述器扩展2D范围的不变特点转化(SIFT)[23]到3维空间。他们用关键点的表面法线和邻近点表面法线的偏离角去描述局部图形。每个邻近点的贡献决定于两个要素,点云样本的密度和临近点到关键点的距离。Rusu et al.[24]提出一个新颖的方法——点云特点柱状图(PFH)去特征化局部特性。PFH有很好的分辨力和被证明非常有效[25],他们之后对邻近点用了简化版的点云特点柱状图(SPFH),去得到快的点云特点柱状图描述器。FPFH[26]保持PFH大多数的分辨力和计算得有效。Tombari et al.[27]引进了独一无二的和无歧义的LRF和提出柱状图指向特征码(SHOT)。SHOT描述器提供一个非常好的在描述性和时间效率的平衡。但它对网格分辨率的变化很敏感。这个方法被Guo et al.[28]去建立LRF这是更稳定的。他们提出了旋转投影数据描述器[27],通过投影被旋转的邻近点到3个坐标平面和计算一系列的特点数据。
3 局部特征
在本文中,我们通过从三个不同方面采用局部形状几何来构造LFSH描述符:局部深度,点密度以及法线之间的偏差角度。图2显示了三个局部几何图特征。
假设P是输入点云,它由N个点{p1,p2,...,pN}组成。给定一个查询点pi,一个球体半径r以pi;为中心。它用于确定pi的邻近点。球体内的点不包括pi是由pi表示的半径邻近点,其由集合Pni表示; {pij |j=1,2..k}。参见图2(a)。令ni和nij分别表示法向量pi和p ij。在这里,nij被设置为被球体表面的局部表面的局部参考轴。垂直于正的LRA的方向,一个正切于球体的平面形成,被定义为投影平面,因此所有的邻近点Pi 将投影到L,形成一个新的点集Prsquo;I n ={prsquo;ij|j=1,2hellip;k}.受到Malassiotis,Strintzis 和Masuda [34] 的启发,我们定义了距离pij和prsquo;ij为范围为[0,2r]的局部深度。它被定义为
这里代表了对点运算产生的操作。
图2 3个局部特征的图解。(a)局部深度(b)法线偏离角(c)水平投影距离。红色,黑色和灰色代表着查询点,邻近点和投赢点。(为了能够看懂图例,读者应使用web格式看这篇文章)。
我们使用的第二个特征是法线之间的偏差角度。 参见图2(b)。 为了估计3D点的法线,本文采用[38]中提出的方法。 它具有对噪声稳定的明显优势。 简要描述如下。给定一个点在P中的pi,使用上述方法确定邻近点。 让是pin的形心。3times;3协方差矩阵Cov(pi)由下式给出
对应于Cov(p;)的最小特征值的特征向量被计算为pi的法向量。 之前的研究[14,44,47]已经表明,基于一对法线之间的偏差角的表示具有很大的辨别性。 因为Q中每对点的计算相当费时44],所以我们减少了计算复杂度到0(k)(与[45]中的0(k2)相反),只需计算ni和nij}。 这是一个折衷对该功能的描述性和时间效率。 角度可以表示为
全文共25126字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14292],资料为PDF文档或Word文档,PDF文档可免费转换为Word

