英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
人类四肢瘫痪的假体装置的神经元集合控制
摘要:神经运动假体(NMPs)旨在通过将来自大脑的运动相关信号(围绕神经系统受损部位)转移到外部效应器来替代或恢复瘫痪人群中丧失的运动功能。为了将完整动物的临床前结果转化为临床上有用的NMP,移动信号必须在脊髓损伤后持续在皮层中,并且在感觉输入和肢体运动长期缺失时由运动意图参与。此外,NMP将要求将意图驱动的神经元活动转换为能够实现有用任务的控制信号。在这里,我们展示了使用飞行员NMP的四肢瘫痪人(MN)的初始结果。通过植入初级运动皮层的96微电极阵列记录的神经元集合活动表明,在脊髓损伤后三年,预期的手部运动调节皮层扣球模式。解码器被创建,提供一个“神经游标”,MN即使在通话时也可以打开模拟电子邮件和操作设备,例如电视。此外,MN使用神经控制来打开和关闭假手,并用多关节机器人手臂执行基本操作。这些早期的结果表明,基于皮质内神经元集体扣球活动的NMP可以提供有价值的新型神经技术来恢复人体瘫痪的独立性。
成千上万的人患有运动损伤,其中完整的运动相关区域由于损伤脊髓,神经或肌肉而不能产生运动。麻痹失调严重限制了独立性,流动性和沟通。目前的辅助技术依赖于现有功能提供替代缺失动作的信号的设备。例如,相机可以监视可用于指向计算机光标的眼球运动。尽管这些代用设备已经有一段时间了,但它们通常在实用性方面受到限制,维护麻烦以及破坏自然行为。例如,对目标物体的注视破坏了眼睛的控制。相比之下,NMP是一种脑机接口(BCI),可通过利用现有的神经基板进行动作-即运动区域中的神经元活动模式,从而指导运动。理想的NMP可以从断开的电机区域提供安全,不显眼且可靠的信号,从而恢复失去的功能。例如,猴子主要运动皮质(MI)臂区域中的神经元提供了有关预期手臂到达轨迹的信息,但是只有当神经信号持续并且可以在瘫痪的人类中通过意图参与时,该命令信号才能用于NMP。
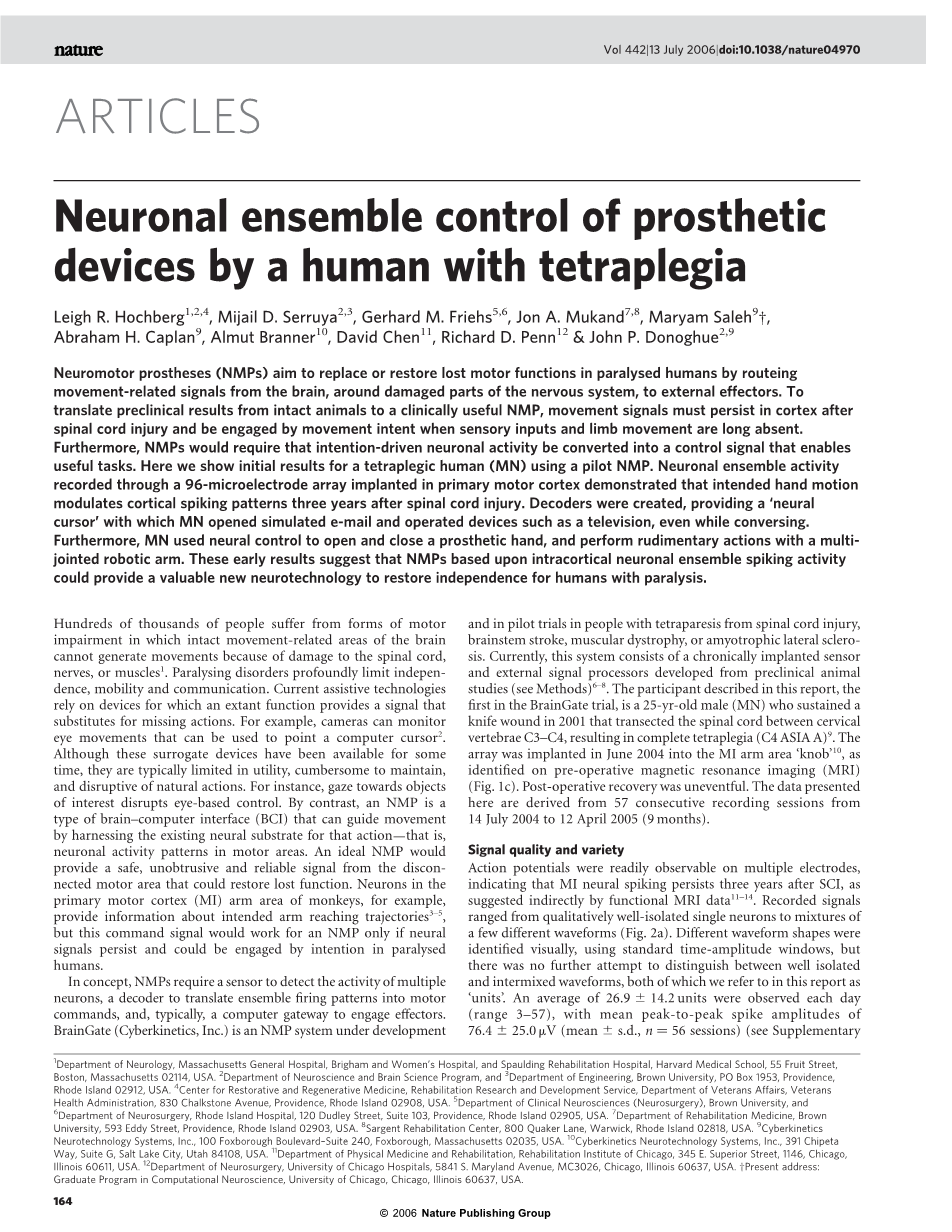
在概念上,NMP需要一个传感器来检测多个神经元的活动,一个解码器将集合点火模式转换成电机命令,并且通常需要一个计算机网关来使用效应器。BrainGate(Cyberkinetics,Inc.)是一种正在开发中的NMP系统,并且正在试用于患有脊髓损伤,脑干中风,肌肉萎缩症或肌萎缩侧索硬化的四肢麻痹的患者。目前,该系统由长期植入的传感器和由临床前动物研究开发的外部信号处理器组成(参见方法)。本报告中描述的参与者是BrainGate试验中的第一例,是一名25岁的男性(MN),2001年因刀伤而横切颈椎C3-C4之间的脊髓,导致完全性四肢瘫痪(C4亚洲A)。该阵列于2004年6月植入术前核磁共振成像(MRI)所确定的MI臂区#39;旋钮#39;(图1c)。术后恢复是平安无事的。本文介绍的数据来自2004年7月14日至2005年4月12日(9个月)的57次连续记录会议。
信号质量和多样性
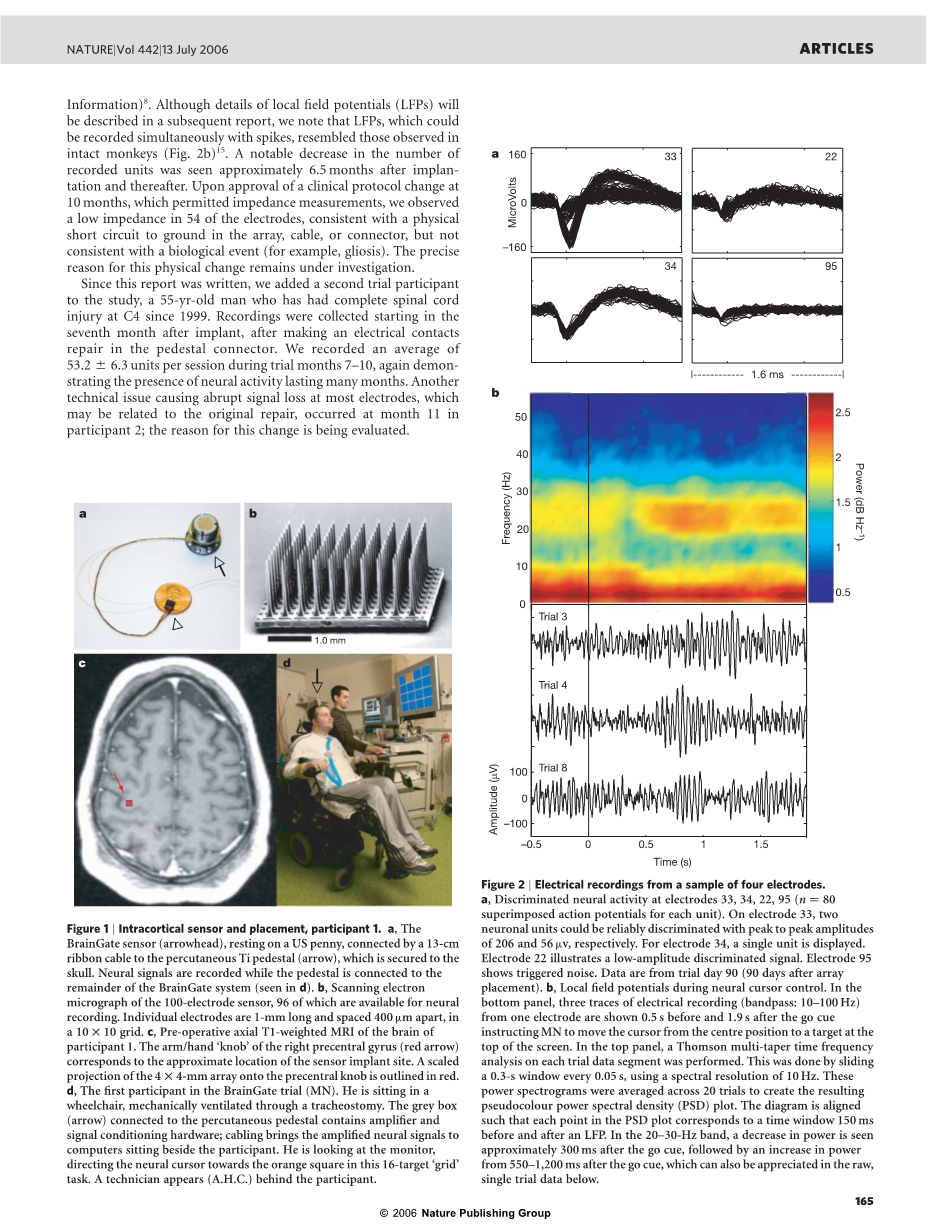
动作电位易于在多个电极上观察到,这表明MI后神经峰值在SCI后三年持续存在,正如功能MRI数据间接表明的那样。记录的信号从定性良好的单个神经元到几种不同波形的混合物(图2a)。使用标准的时间-振幅窗口可以直观地识别不同的波形形状,但没有进一步尝试区分良好隔离波形和混合波形,我们在本报告中将这两种波形称为“单元”。平均每天观察到个单位(范围3-57),平均峰值振幅为(平均值标准差,n = 56个会话)(见补充信息)。尽管在随后的报道中将描述局部场电位(LFP)的细节,但我们注意到LFPs可以与峰值同时记录,与完整猴群中观察到的相似(图2b)。在植入后和随后大约6.5个月时,观察到的单位数量显着减少。在批准10个月的临床方案改变(允许阻抗测量)后,我们在54个电极中观察到低阻抗,与阵列,电缆或连接器中的对地物理短路一致,但与生物学事件不一致(例如胶质增生)。这种身体变化的确切原因仍在调查中。
自从撰写本报告以来,我们增加了第二位试验参与者,这是一名55岁的男性,自1999年以来在C4患有完全性脊髓损伤。记录在植入后第7个月开始收集,触点在底座连接器中修复。我们在7-10个月的试验期间平均记录每次个单位,再次证明持续数月的神经活动。另一个导致大多数电极突然丢失的技术问题,可能与原始修复有关,发生在参与者2的第11个月;这一变化的原因正在被评估。
意图调制
根据要求,想象的肢体运动在多个电极上调制神经激发,从第一次实验阶段开始。在MN被要求想象一系列运动时,连续四次评估调制。这个系列揭示了丰富多样的发射调制,与猴子MI中观察到的模式基本一致。重要的是,这项活动是由这位参与者患有颈椎脊髓损伤的想象行为引起的。图3a说明了某些神经元如何选择性地进行一种想象的动作(双手一起/分开),而其他同时记录的则是由不同的想象动作(手肘或手腕)参与的。这种多样性包括用想象的手或远端手臂动作(例如,手开/关,图3c)发射的神经元和在实际进行的肩部运动期间发射的神经元(参见补充图1)。非选择性神经元,在任何想象的上肢作用(图3b)开始活动时,也被观察到。如图3c和补充图1所示,神经元在想象行为的请求时以相对时间锁定的方式发射。这些结果表明,来自小型心肌梗死区域的有限样本内发射模式的丰富异质性。这种多样性在创建灵活的控制信号方面很有用。
线性滤波器结构
MI神经元集合活动作为瘫痪者的控制信号需要一种新的方法来建立发射模式和预期行动之间的转换(过滤功能)。对于每个会话,单位被用来创建一个过滤器(见方法),以提供一个二维输出信号显示为监视器上的光标位置。一个简单的线性滤波器算法,与完整猴子中使用的算法相同,用于创建滤波器。与使用完整猴子进行的大多数研究不同,在手部运动已知和运动学直接测量的情况下,我们根据指示的动作(完整猴子的一项研究中已经报道了基于指令的算法)预测MN的预期手部运动。因此,为了构建过滤器,MN被要求想象手动追踪技术员操作的鼠标通过随机放置的可视目标(见方法)实际上正在移动的“技术员光标”。过滤器功能用于解码活动并驱动“神经游标”。
在神经游标控制期间的MI活动
在神经游标控制期间神经元的特征与MI期望的类似。在完整猴子的MI中的神经元特征性地开始在运动开始之前调节它们的发射并且将活动调整为手的运动方向。为了将这种神经活动与患有脊髓损伤的人的MI进行比较,MN使用神经游标执行步骤跟踪,“去中心”任务。该任务要求神经光标从中心目标移动到四个径向移动目标之一(屏幕位置:上,下,左,右;参见补充视频1)。对于六个会话中的每一个,当目标提示出现时,MN通过想象手部运动(参见方法)来执行该任务。该任务在过滤器构建后立即执行,无需干预实践。MI神经元在想象动作期间的定时和定向调谐特征与完整的非人灵长类动物的MI中观察到的一致。图4显示,在#39;走过#39;提示之后不久就会出现尖峰速率调制,并且调制会随着目标位置而变化,正如MI所预测的那样,如果实际手臂运动被执行的话。此外,73个被区分的单位中的66个(90.4%)显着改变了他们的发放率(Kolmogorov-Smirnov检验,alpha;=0.05,在滑动的1-s窗口上计算的比率,每隔0.05秒重叠;每个条件的60-s数据集,n = 3个会话)。这些结果表明,即使在脊髓损伤后几年以及没有动力学反馈和肢体运动的情况下,MI神经元仍然可以积极参与和编码任务相关信息,以期移动通常由该MI区域控制的肢体。
神经光标控制的质量
在追踪滤波器构建任务的最后一个块期间,神经光标位置与技术人员光标位置显着相关(x坐标,y坐标,n = 6个会话,图5)。 当使用线性滤波器预测来自MI神经元集合的实时手位时,这些相关性与完整猴子中所见的相似或更好。使用闭环神经控制,可以将神经游标定向为具有与完整猴子所看到的形式定性相似的形式的目标。如同完整的猴子一样,与健全个体的手部运动相比,神经光标运动具有潜在的不稳定性和可变的振荡分量。线性滤波器连续的神经光标运动使得光标固定在单个位置难以实现。
来自中心外任务的数据被用于评估光标控制的速度和准确度,这是任何未来实际NMP的基本设计参数。如图6所示,当在一系列的六个阶段中测量时(另见补充图2),参与者正确地获得了目标的73-95%(对照6.5%;n = 80,配对t检验,,参见方法)。性能错误反映了光标方向控制中的不稳定性和保持目标位置的能力。成功获得目标的平均目标时间为(标准误差)。尽管MN试验中最好的13%在通过使用计算机鼠标的有效控制(n = 3,平均(标准误差))始终达到的范围内,但使用神经控制的MN的时间分布偏向更长采集时间(图6b)。当MN试图避开光标路径上的障碍物时,将光标指向随机放置的目标时,在更复杂的空间控制任务中有效地使用神经光标(见补充视频5)。有关空间和时间精度的更多信息从“网格任务”中获得(参见补充信息)。如补充视频8所示,参与者2还完成了中心外任务,突出表明第二个患有脊髓损伤的参与者自动调节其运动皮质活动以便外部设备控制的能力。然而,该参与者的神经控制一般不如MN那么准确和一致;我们正在调查技术或其他因素可能影响此表现的程度。这些和其他参与者的数据将在随后的手稿中报告。
虽然他是四肢瘫痪的,但MN保留了肩膀,颈部和头部的活动能力,还有一些记录在肩关节活动期间的MI细胞(见补充图1)。NMP几乎总是在一些现有的运动能力的情况下运行(鉴于中枢神经系统损伤患者的剩余感觉和运动功能的可变性);因此,在过滤器构建和使用过程中,MN并没有被要求保持完全静止,有时他的头部或颈部也会移动。因此保留的运动可能影响光标行为,就像已知这样的运动影响与普通手部动作相关的活动一样。然而,这些仍然完好的动作对于MN的光标控制来说似乎并不重要,特别是当他演奏“神经傍”(补充视频4)时可以理解。在这段视频中,头部或肩部的运动有时伴随着光标控制,但在其他时候MN有目的地移动光标,同时他的头部保持静止,而在其他时期,他的头部移动,但光标运动似乎与头部运动无关。我们将补充视频4中的神经光标位置与头部位置(通过视频回放监视器上的坐标进行评估)进行比较,发现没有一致的关系()。这一发现与头部和光标控制之间独特的因果关系不一致。另外,我们反复观察到,至少在某些时候,MN在不移动肩膀的情况下执行神经控制(和开环)任务。因此,根据我们的指示和MN自我报告,他正在积极想象手臂动作,我们得出结论,光标运动是在想象/预期动作的指导下进行的。
直接控制假肢装置
连续的电脑光标控制可以用来为瘫痪者提供许多有价值的新产品来开展日常生活。这样的控制信号不仅可用于指导计算机软件,而且还用于操作外部物理辅助设备。MN在一系列演示中测试了他执行潜在有用操作的能力。
MN使用简化的计算机界面来打开模拟电子邮件并使用绘图程序绘制大致圆形的图形(补充视频2)。使用神经光标耦合到简单的硬件接口,他调整了电视的音量,频道和功率。他还能够玩电子游戏,如神经球(见辅助视频3-5)。两个机器人设备的控制得以实现,使MN能够直接操纵环境。在一个例子中,神经输出被连接到假手(Liberating Technologies,Inc.;参见方法),并且MN能够在意志控制下打开和关闭手(参见补充视频6)。虽然只是一种比例控制的一维形式,但他在观察手并在不需要光标显示的反馈的情况下进行了几次试验后就实现了这一操作。最后,MN使用一个简单的多关节机器人肢体来抓住一个物体并将其从一个位置运送到另一个位置(见补充视频7和补充信息)。这些演示说明直接将控制转移到物理设备上,而不依赖于持续查看计算机光标反馈,并且建议可以实现对环境的操纵以实现诸如自我进食的饮食等活动以及其他目标导向的行为在四肢瘫痪的人类中。
值得注意的是,这些任务中的每一项都很快实现,可以在参与者交谈时进行。因此,基于MI的NMP可能具有这样的特性,即允许外部设备控制,而不是强健的人在使用他们的手臂或手并同时执行其他运动或认知功能时遇到的中断更少。
讨论
这项来自正在进行的试验性临床试验的第一位参与者的研究提供了初步证据,证明人类无法移动或感觉其肢体可以使用MI神经元集合峰值活动作为对照源来操作NMP。此外,我们证明,神经扣球仍然在心肌梗死区,并可在脊髓损伤后数年内调节。这些发现提供了许多关于皮质功能和脊髓损伤对人类影响的新见解(见补充信息)。
尽管MN使用直接神经控制来执行合理的挑战性任务,但控制水平远低于使用手动控制的电脑鼠标的健全人的水平。一些因素可能会影响控制,包括:(1)与通常使用的非常大的数量相比,这个单一阵列记录的随机选择的一小组神经元;(2)脊髓损伤机制或损伤后持续时间的影响;(3)记录皮质层;(4)我们的过滤器建造方法;(5)线性滤波器的性质(例如,与卡尔曼滤波器,自适应算法或支持向量机方法相比较,尚未在我们的工作中测试过);(6)过滤器建立或控制过程中的注意力和动机状态;和(7)用户界面。记录人口在不同天数的变化也可能导致控制的变异性和不稳定性。移动乐团可能是由于小组动作或通过其他知之甚少的机制造成的。尽管存在这些变量,但重要的是要注意,可以从该神经群体每天创建有用的滤波器,并且知识和技术的进步可能改进记录和解码。例如,光标控制可能会通过自适应算法或更多选择性的神经信号进一步增强。峰值活动和同时记录的LFPs的组合可以提供可能提高性能的额外信号。
优化性能的努力可能有助于确定瘫痪人群临床上有用界面的设计标准。例如,基于脑电图(EEG)的控制系统已经通过限制试验时间,每次试验后重新定位光标位置以及一旦命中目标就停止光标运动而得到改进。相比之下,我们的参与者必须始终保持光标控制,而没有这些接口增强功能。然而,我们发现,当目标停留时间减少时(网格任务),试验成功率更高。并入额外的反馈(例如,视觉,听觉,体感)也可能有助于提高性能。
游标和外部设备控制也可以通过学习来改善。完整
全文共6510字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9631],资料为PDF文档或Word文档,PDF文档可免费转换为Word

