英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
自动导引小车系统设计与控制综述
Tuan Le-Anh *, M.B.M. De Koster
RSM Erasmus University, P.O. Box 1738, 3000 DR Rotterdam, The Netherlands
Received 30 April 2003; accepted 14 January 2005
Available online 23 March 2005
摘要
本文综述了自动导引车系统的设计与控制。我们解决了大多数关键相关问题,包括引导路径设计、确定车辆需求、车辆调度、空闲车辆定位、蓄电池管理、车辆路径和死锁解决。我们讨论并分类了重要的模型和文献中主要出版物的结果,包括经常被忽视的领域,如闲置车辆定位和蓄电池管理。此外,我们还提出了一个新的调度规则分类、自动导向车辆系统设计和控制框架,并提出了一些富有成效的研究方向。2005爱思唯尔有限责任公司保留所有权利。
关键词:基于车辆的内部运输;自动导向车辆;文献综述
- 介绍
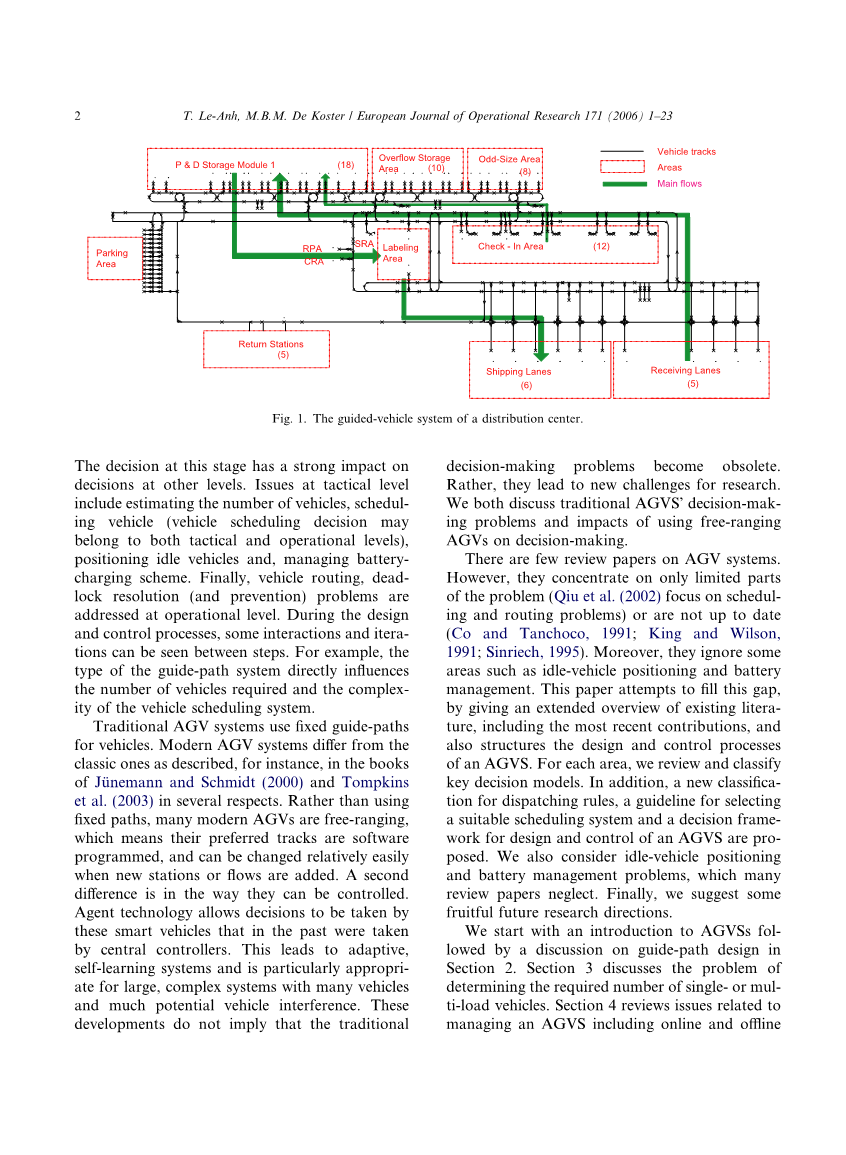
使用自动导向车辆(AGV)的基于车辆的内部运输系统通常用于制造厂、仓库、配送中心和转运终端等设施。它们被称为自动导向车辆系统(AGVSS)。图1给出了计算机硬件和软件分发中心(De Koster等人,2004)中的此类AGV的示例,其中引导车辆在不同位置(例如,从接收车道到存储区域,以及从存储区域到运输车道)之间运输(托盘)货物。AGV的设计和控制过程涉及许多问题。主要有:引导路径设计、估计所需车辆数量(或确定车辆需求)、车辆调度、空闲车辆定位、电池管理、车辆路径和卡顿解决方案。它们属于不同层次的决策过程。引导路径设计在战略层面上可以看作是一个问题。
图1、配送中心的引导车辆系统。
这一阶段的决策对其他层次的决策具有很强的影响。战术层面的问题包括估计车辆数量、调度车辆(车辆调度决策可能属于战术级和作战级);定位闲置车辆,管理电池充电方案。最后,车辆路径,卡顿定解决(和预防)问题是在操作级别解决的。在设计过程中 以及控制过程,在步骤之间可以看到一些交互和迭代。例如,引导路径系统的类型直接影响所需车辆的数量和车辆调度系统的复杂性。
传统的AGV系统使用固定的车辆引导路径。现代AGV系统不同于经典系统,如Ju–nemann和Schmidt(2000年)和Tompkins等人所述。(2003)在几个方面。许多现代的自动驾驶仪不使用固定的路径,而是自由排列,这意味着它们的首选轨道是由软件编程的,当增加新的站点或流量时,可以相对容易地进行更改。第二个区别在于它们的控制方式。代理技术允许这些智能车辆做出决策,过去这些智能车辆是由中央控制器做出的。这导致了自适应的自学习系统,特别适用于具有许多车辆和许多潜在车辆干扰的大型复杂系统。这些发展并不意味着传统的决策问题已经过时。相反,它们给研究带来了新的挑战。我们都讨论了传统的AGV决策问题以及使用自由行程AGV对决策的影响。
关于AGV系统的评论文章很少。然而,他们只关注问题的有限部分(邱等人(2002)关注调度和路由问题)或不是最新的(Co和Tanchoco,1991年;King和Wilson,1991年;Sinriech,1995年)。此外,他们忽略了一些领域,如闲置车辆定位和电池管理。本文试图通过对现有文献(包括最新的贡献)的扩展概述来弥补这一差距,并构建了AGV的设计和控制过程。对于每个领域,我们审查并分类关键决策模型。此外,本文还提出了一种新的调度规则分类、选择合适调度系统的准则以及设计和控制AGV的决策框架。我们还考虑了闲置车辆定位和蓄电池管理问题,许多综述论文都忽略了这些问题。最后,我们提出了一些富有成效的未来研究方向。
我们首先介绍了AGVSS,然后在第2节中讨论了引导路径设计。第3节讨论了确定单载或多载车辆所需数量的问题。第4节回顾了与AGV管理相关的问题,包括在线和在线调度、车辆调度、空闲车辆定位、电池管理、车辆路径以及AGV BYA决策框架的设计和控制过程。最后,在第6节中,我们得出结论并确定进一步研究的主题。
- 导路设计
导程设计是自动导向器设计和控制中的一个重要问题。这是最需要考虑的问题之一。大多数出版的关于引导路径设计问题的著作都假定给出了取货/交货(P/D)站的设施布局和位置,并加以确定。主要问题是确定要包含在解决方案中的连接或引导路径段。在某些情况下,连接线的平行车道数也要确定。这个优化问题还需要设施中各部门之间的材料流动。该信息用于构建引导路径设计问题所需的“从-到”流程图。在网络流量模型中,车辆引导路径通常表示为通道交叉点;抓取和传递(P/D)位置可以看作是由一组弧连接的图上的节点。弧描述了车辆在节点间移动时可以遵循的路径。有向弧表示车辆流向。成本可以分配给每个弧,表示一段的两个端点之间的距离或车辆沿弧行驶所需的时间。网络流模型可以转换为0-1整数优化模型。导引道设计问题的主要目标是使车辆总行程最小,信息不足是导引道设计的一个重要问题。例如,仓库内物料的流动可以随着时间的推移而改变,并且难以估计。
导轨系统可根据表1所示的特性大致分类。流动构造描述了引导路径网络的复杂性。在最简单的情况下,引导路径系统仅由一个单回路组成。组合在一起的循环形成一个串联配置。传统的拓扑结构是一个复杂的网络,具有路径、交叉、快捷方式和连接。网络中的路径段只能包含一条车道或几个平行车道。车辆只能沿一个方向(单向)或双向)行驶一条车道。
表
|
轨道系统的特征 |
||
|
流动构造 |
平行车道数量 |
流动方向 |
|
常规 |
单车道 |
单向流动 |
|
单回路串联 |
多车道 |
双向流动 |
选择适当类型的导轨系统非常重要。不幸的是,没有指导方针。通常根据设施的特点和设计师的经验选择导轨类型。专家系统可用于指导路径系统的选择过程。在选择了合适的导路系统类型后,设计人员可以使用合适的(数学)模型来获得最佳的导路系统。在实践中,传统的引导路径系统经常出现在仓库和配送中心(de Koster等人,2004年);例如,在跨船坞中心使用单回路系统。串联配置可能更适合于将工作站分组到制造单元的制造环境。
2.1性能标准
一个重要的问题是,哪些性能标准对导路设计问题至关重要。Beamon(1998)描述了AGVSS的几个重要性能标准,如车辆行驶时间、车辆利用率、队列长度和材料处理成本。在导轨设计中,最常见的性能标准是将与给定布局和流向相对应的车辆总行驶距离最小化(Gaskins和Tanchoco,1987年;Kaspi和Tanchoco,1990年)。卡斯皮等人。(2002)在目标功能中包括车辆装载和空载行驶时间。Lim等人(2002年)将车辆总行驶时间(包括装载和空车行驶时间以及拥挤或车辆干扰引起的等待时间)作为目标函数。几位作者使用多个目标。Kim和Tanchoco(1993)考虑了旅行成本和每个路段的成本。陈等人。(1999)在其模型中,使用车辆总行程时间和行程故障率作为性能指标。Talbot(2003)使用所需的车辆数量和引导路径测量系统性能的长度。
接下来的三个部分回顾了文献中三个最流行的引导路径系统的设计问题。
2.2.1单向导路系统
单向常规导路系统在实际应用中非常普遍,特别是在仓库中。或配送中心(图1)。Gaskins和Tanchoco(1987)将引导路径设计问题定义为0–1整数规划(IP)模型。他们的模型旨在确定引导路径(或流动路径),从而将车辆装载的总行驶时间降至最低。Gaskins和Tanchoco(1987)使用路径距离来描述从一个节点到另一个节点的可行路径上的行驶距离。它们的模型中有三种主要的约束类型:(1)确保没有任何节点成为接收节点;(2)确保没有任何一组节点变成接收;(3)确保采用最短路径(可选)。Gaskins等人的模型。(1989)选择要包含在引导路径系统中的平行路径(车道)数量和路径方向。车辆空行程时间可纳入Gaskins和Tanchoco(1987)以及Gaskins等人的模型中。(1989)通过将相应的“从”修改为“聊天”。Goetz和Egbelu(1990),Kaspi和Tan-Choco(1990年)、Sinriech和Tanchoco(1991年)、Kim和Tanchoco(1993年)在Gaskins和Tanchoco(1987年)模型的基础上,提出了几种改进的0-1整数规划模型,用于导路设计问题。然而,对于实际问题,0-1IP模型的导程设计规模仍然很大。为了加快解决程序,Goetz和Egbelu(1990)只关注各部门与Sinriech和Tanchoco(1991)之间的主要影响。在它们的分支定界算法中只有交叉节点。
Kaspi等人(2002)通过明确地将车辆空行程纳入目标函数和减少二进制变量的数目。Kaspi等人(2002)使用分支定界深度第一搜索算法求解该模型。在执行搜索算法的过程中,通过解决运输问题来计算空车流量,将空车从一组交货站分配到一组提货站,以将总分配流量最小化。
除了空车行驶时间外,车辆干扰造成的时间损失也会影响解决方案的质量。林等。(2002)在其设计模型中考虑车辆总行程,包括因拥挤和车辆干扰造成的空重车行程时间和时间损失。他们使用Q-学习技术(一个学习如何将状态与行为匹配以最大化数字奖励的过程)来估计车辆的总行程时间。他们表明,他们的研究结果优于Kim和Tanchoco(1993年)。显然,解决方案的质量在很大程度上取决于Q-学习过程计算的时间的准确性。
更复杂的问题由Johnson和Brandeau(1993、1994)以及Al Sultan和Bozer(1998)解决。他们的模型同时选择路径配置和P/D站。al-Sultan和Bozer(1998)使用模拟退火启发式方法来解决导程设计问题。在他们的论文中,他们还注意到Gaskins和Tanchoco(1987)的模型可能产生不可行或非最优解。Johnson和Brandeau(1993年、1994年)将AGV的效益和设置取货/送货(P/D)站的固定成本作为目标函数,而不是车辆总行驶距离。Johnson和Brandeau_s(1993)模型还确定了保证服务水平所需的车辆数量(从中央停车场补充工作站之前的预期时间)。车辆池大约由M/G/C排队系统预测。他们将问题表述为一个0-1IP模型,并使用分支定界算法来解决。
一般来说,除了P/D站,在引导路径设计模型中还需要考虑停车和电池充电位置。 此外,还需要更快的解决方案方法。
2.2.2.双向导路系统
传统的双向导轨系统在物料搬运系统中不受欢迎,尽管它可能比对应的单向的更加先进。主要原因是这些系统的控制问题变得非常复杂。这个问题可以通过采用双向单向车道来解决。然而,双车道系统需要更多的空间,而且成本更高。在文献中,对传统双向导轨系统的研究很少(Egbelu和Tanchoco,1986;Gaskins等人,1989)。Egbelu和Tanchoco(1986)为单车道双向引导路径系统的设计提供了指导。Gaskins等人(1989)提出了一个双向引导路径系统的模型,其中行驶距离和车道数被最小化。车道的数量和方向在其模型中确定。该模型假定每条车道的通行能力和最大平行车道数已给出并确定。
双向导轨系统尤其适用于车辆干扰很少发生的系统,如串联导轨系统(第2.4节)。
2.3.单回路导通系统
单回路和传统的引导路径系统之间的主要区别在于,在单回路布局中,车辆仅在一个回路中行驶,没有任何捷径或替代路线(如图2左侧的回路)。单回路系统中的行程模式通常是单向的。双向行驶是可能的,但在这种情况下,可能会发生车辆干扰。单回路系统中的车辆可以通过简单的调度规则进行控制,如第一次遇到第一次服务(FEFS),意味着空车应承担它遇到的第一个负载。Tanchoco和Sinriech(1992)提出了设计单回路系统的最佳程序。主要目标是确定“最佳”单回路引导路径,并沿回路定位P/D站。tanchoco和sinriech_s(1992)程序由五个部分组成:
(1)IP公式用于确定初始有效循环(有效单循环问题VSLP)-有效循环至少包含一个 设施布局中每个部门的分段。
(2)程序(确定所有单回路FASL)使用两相方法列举所有可能的有效单回路引导路径。 第一阶段通过扩展初始循环创建新的有效单循环。第二阶段通过收缩前一阶段的最后一个循环来生成更有效的循环。
(3)循环消除规则用于减少候选循环的数量(淘汰次循环)。
(4)模型通过求解一个混合整数,确定每个部门在单个循环路径上取送站的位置。 编程(MIP)问题(单回路站位置问题SLSLP)。目标是尽量减少总流量时间在系统中。
(5)下限计算程序计算候选循环的下限。该下界可以帮助快速消除某些次循环,而不是针对每个非常耗时的有效单循环解决SLSLP问题。
他们的迭代算法涉及解决两个0–1 IP模型,对于实际问题来说非常耗时。在Sinriech和Tanchoco(1993)中,Chen等人提出了单回路导路系统
全文共23413字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[522]

