
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
摄影测量和遥感杂志102(2015)172-183
目录可在科学直接摄影测量和遥感杂志摄影测量和远程Sensin期刊主页上查阅,网址:www.lesvier.com/find/isprsjp
线段提取的大规模散乱点云的杨斌琳,王成,俊丞,毕丽晨,傅凯佳,钟贵晨,Jonathan Li C福建重点实验室 传感和智能城市的计算,计算机科学系,厦门大学,厦门,福建361005、中国B软件,厦门大学,厦门,福建361005学校,中国学校地理 滑铁卢滑铁卢大学地理与环境管理,N2L3G1,加拿大
文章历史:
2014年5月28日收到
2014年12月18日接受修正
2014年12月19日到2015年2月21日在线提供
关键字:
线段提取三维线支持区域点云
激光雷达
移动激光扫描三维结构
摘要
在图像中的线段检测已经是一个被广泛研究的话题,尽管它在3D点云中得到的关注要少得多。得益于目前的LiDAR设备,大容量的poin云越来越普遍。大多数人造物体的表面都是扁平的.。在平面对相交处发生的线段提供了关于几何Conte的重要信息。点云的NT,尤其适用于建筑物的自动重建和分割。本文提出了一种能精确提取平面交点李氏的新方法。来自大型原始扫描点的NE段。三维直线支撑区域,即直线直线结构附近的点集,同时提取。三维线的支撑区域是由r线段半平面(LSHP)结构,为线段提供了几何约束,使线段更加可靠、准确.。我们在点云上演示了我们的方法。激光雷达设备获取的大规模、复杂、真实世界场景。我们还演示了三维线支持区和蓝色湖畔城市场景的抽象结构中的应用。
2015年国际摄影测量和遥感学会。(摄影测量和遥感学会)由Elsevier B.V.出版。版权所有
1. 介绍
得益于机载和地面移动激光扫描传感器技术的进步,密集点云变得越来越普遍,并且需要新的方法来增加。这些点云变得越来越重要。直线结构作为人造物体的共同特征,在各种应用中发挥着重要的作用,如:行动(Yang等人,2013年);建筑物轮廓提取(Baillard等人,1999年);本地化(Borges等人,2010年),城市模型建设(Lafarge和Mallet,2012年);校准(Moghadam等人,2013年);基于线的可视化(Chen和Wang,2011年);以及更多。本文着重于点云的直线集提取,而现有的大部分工作都集中在二维线段上。单一图像中的检测(Ballard,1981年;Burns等人,1986年;Von Gioi等人,2010年)和多视角图像中的三维线段重建(Baillard等人,1999年;Woo等人,2009年;Jain等人,20岁)10)。只有少数几篇论文考虑了点云(Lu等人,2008年;Moghadam等人,2013年)。
现在的扫描仪已经获得了大量的密集点云,例如riegl vmx-450扫描仪每秒输出一百一十万个量程。因此,最大的挑战之一是找到解决海量数据的有效方法。散乱的点云缺乏法向量和协非相关信息,使得问题更加具有挑战性。
我们的方法是针对大规模无组织点云从真实世界中提取线段的问题而设计的。这里的线段定义为两个半平面的交点.。增加在直线段,我们考虑了直线结构附近的点区域。这样的区域被指定为“三维线支持区域”。“3d”一词用于Distin-g从“线-支持区域”的概念中提取区域,这已经被证明是提取图像中线段的一个健壮的描述符。
该方法的关键思想是首先通过不同视点的非真实感渲染将点云转换成阴影图像集合;然后是lsd算法(von gioi等人,2010)。应用于这些图像以提取2d线支持区域。然后将这些二维线支持区域投影到初始点云中,作为三维线支持区域,并与每个区域合作。保留了大约一条线段。接下来,为了保持精度,每个三维线支撑区域都由我们的线段半平面(LSHP)结构来拟合.。最后,三维线支撑区域及其LS。HP结构被细化为输出。
对应作者电子邮件地址:cwang@xmu.edu.cn(C.Wang)。
0924-2716/2015国际摄影测量和遥感学会。(摄影测量和遥感学会)。由Elsevier B.V.出版。版权所有。
LIN等人/摄影测量和遥感学会学报102(2015)172-183
- 三维原始扫描点云(由环境遮挡呈现) b.三维原始扫描点云(由环境遮挡呈现
- )。
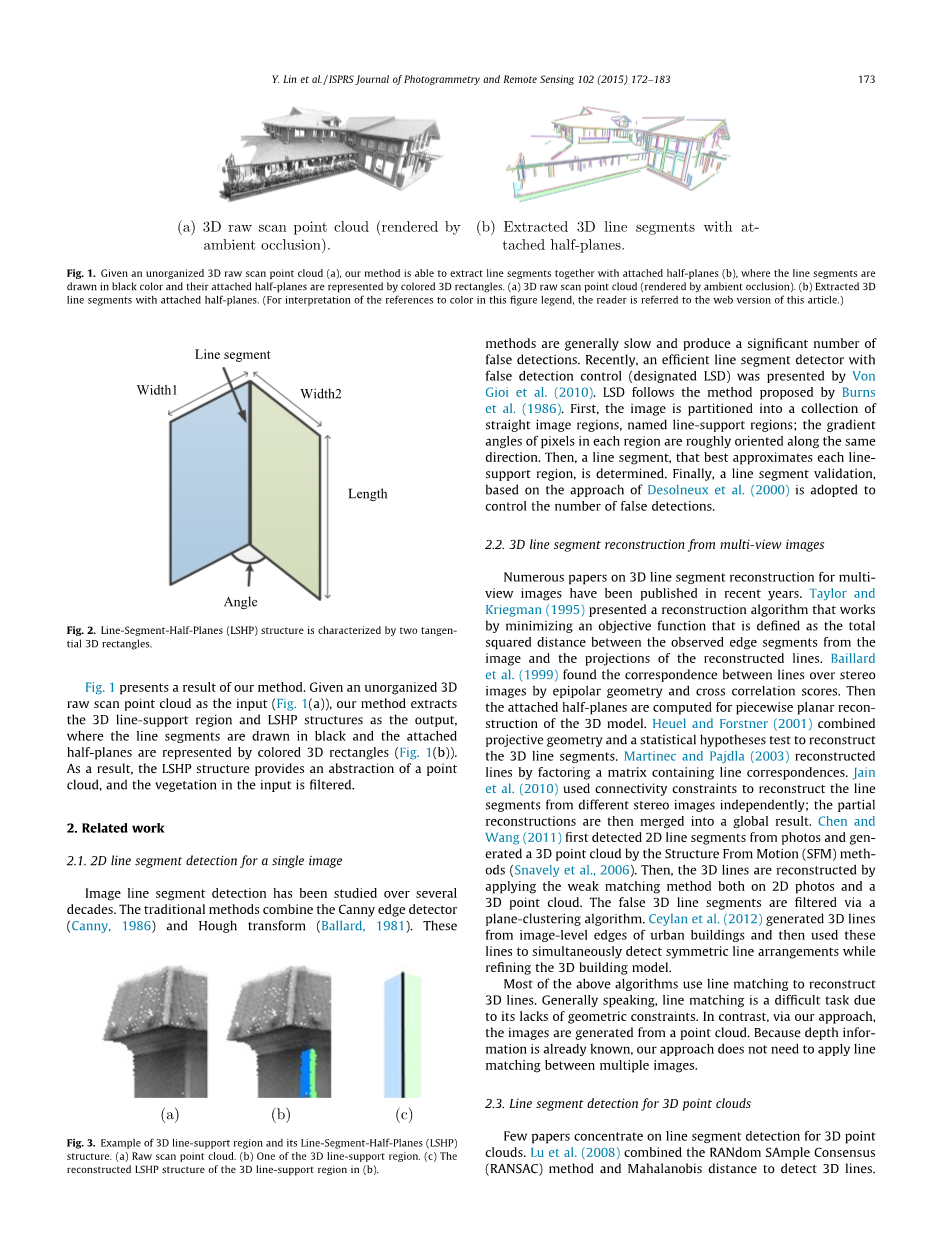
外形1在一个无组织的三维原始扫描点云(A)中,我们的方法能够将线段与附加的半平面(B)一起提取,其中线段用黑色绘制,并且它们的附加的半平面用彩色的三维矩形表示。(A)三维原始扫描点云(由环境遮挡呈现)。(B)提取带有附加半平面的三维线段。(用于口译在此图形图例中对颜色的引用中,读者可以参考本文的web版本。)
外形2.线段半平面(LSHP)结构由两个正切三维矩形组成.
外形1给出了该方法的结果。给出一个无组织的三维原始扫描点云作为输入(图1)。1(A),我们的方法提取三维线支持区域和lshp结构作为输出,其中t。线段用黑色绘制,附加的半平面用彩色的三维矩形表示(图1)。1(B))。因此,LSHP结构提供了点云的抽象,输入中的植被被过滤。
2.相关工作
2.1一幅图像的二维线段检测
图像线段检测已经研究了几十年。传统方法将Canny边缘检测(Canny,1986)和Hough变换(Ballard,1981)相结合。这些方法通常是缓慢的,产生大量的错误检测。最近,Von Gioi et提出了一种高效的带假检测控制的线段检测器(LSD)。艾尔。(2010年)。LSD遵循Burns等人提出的方法。(1986年)。首先,将图像分割成一组直线图像区域,称为直线支持区域,即pix的梯度角。每个区域的ELS大致沿同一方向定向。然后,确定一个线段,该线段最好地近似于每个线支持区域.。最后,基于Desolneux等人的方法。(2000)用于控制虚假检测的数
量。
|
(a) |
(b) |
2.2。基于多视点图像的三维线段重建
近年来,大量关于多视点图像三维线段重建的论文已经发表。Taylor和Kriegman(1995)提出了一种通过最小化目标函数,定义为图像中观察到的边缘段与重建线投影之间的总平方距离。Baillard等人。(1999)立体声图像上线条间的响应通过极几何和互相关分数。然后,对三维模型的分段平面重构进行了附加半平面的计算。休厄尔NDForstner(2001)结合射影几何和统计假设检验重建三维线段。Martinec和Pajdla(2003)通过分解包含l的矩阵重构直线我们的信件。Jain等人。(2010)使用连通性约束独立地从不同的立体图像中重构线段;然后将部分重建合并为gl。奥巴马的结果。Chen和Wang(2011)首先从照片中检测到2D线段,并通过运动结构(SFM)和ODS(Snavelyet al.,2006)对三维点云进行识别。然后,3D线是利用弱匹配方法对二维照片和三维点云进行重建。通过平面聚类算法对假三维线段进行滤波。Ceylan等人。(2012年)生成的3D从城市建筑物的图像水平边缘线,然后利用这些线同时检测对称的线排列,同时完善三维建筑模型。
上述算法大多采用线匹配的方法来重建三维直线。一般情况下,直线匹配由于缺乏几何约束而成为一项困难的任务。相反,通过我们的方法,这些图像是从点云生成的。由于深度信息已经被知道,我们的方法不需要应用多幅图像之间的直线匹配。
2.3三维点云的线段检测
外形3.三维线支撑区域及其线段半平面(Lshp)结构的实例(A)原始扫描点云(B)三维线支撑区之一(C)重建的th的lshp结构。e(B)中的三维线-支持区域。
很少有论文集中于三维点云的线段检测。Lu等人。(2008)结合随机样本一致性(RANSAC)方法和Mahalanobis距离检测三维线。
Borges等人。(2010)提出了从激光点云中提取平面相交线和深度间断线的方法。提取平面相交线或深度不连续线ES方法首先通过分析由每个点的k近邻定义的协方差矩阵的特征值,对平面点或势边点进行分类。然后是g区域赛艇过程迭代合并平面点或潜在的边缘点,根据其NOR-mals或线方向的相似性,将它们合并成簇。莫哈达姆等人。(2013年)采用同样的方法t不要提取平面相交线。
然而,该方法在Lu等人中的结果。(2008)是非卫星系统,因为只提取了几个线段。改变,平面的方法,如博尔赫斯等人的方法。(2010年)和莫哈达姆等人。(2013年),有以下缺点:
(1)确定平面的边界是困难的。(2)适应狭小平面的任务比较困难。有了嘈杂的点云,任务就变得更加困难。(3)此外,当数据变得复杂时,这种方法可能在非平面表面产生意想不到的线条。
另一种可能的方法是首先沿着线性结构提取尖锐的特征,然后将它们分组成直线。有关锐利特征提取方法的详细信息,请参阅Daniels等人。(2007年),韦伯等人。(2010年)和Altantsetseg等人。(2013年)。然而,锐利特征提取方法对噪声不具有鲁棒性,因为具有锐利特征和噪声区域的区域同样具有很高的鲁棒性。H表面梯度,很难分辨。另外,在三维空间中,线分组算法的设计也是比较困难的。
3. 概观
本节首先介绍了三维线支撑区域和线段半平面(LSHP)结构的概念,然后对我们的方法进行了概述。
3.1三维线支撑区域和线段半平面(Lshp)结构
用于图像中的线段检测,Burns等。(1986)首次引入了“线支持区域”这个术语,它被定义为二维图像空间中的一个直线区域,其像素具有相似的gra-di。耳鼻喉角。线支持区域被证明是一种鲁棒的图像中线段提取方法。
在点云环境下,定义了一个三维线支持区域作为两个平面最接近交点的点集,并提出了一种适合于三维线的线段半平面(LSHP)结构。支援区域。如图所示。2、三维直线支撑区的LSHP由一对切向三维矩形来表征。每个矩形都由以下分段米描述:宽度,长度、法向量和位置。通过计算两个矩形的相交,得到一个线段。第五节给出了LSHP结构的建模过程。
一个三维线支撑区域及其线段半平面结构的例子如图所示。3.
3.2. 构架
如图所示。.我们的框架有以下三个步骤:
3.2.1.。三维线支持区域提取
给定一个散乱的点云,p作为输入(图4(a)),p被投影到阴影图像的集合中(图4(b))。
均匀分布的观点有一个球体周围的EA生成P.CH视点,P投影到阴影图像(图)。4(B))。
然后,应用LSD算法(VonGioi等人,2010年)提取二维直线支持区域(图1中的Red1矩形)。4(C)。这些提取的2D线支持区域然后在以原始点云作为三维线支持区域。
3.2.2.LSHP建模
对于每个三维线支撑区域,我们首先将区域投影到沿其主轴的平面上。然后,采用基于动态规划的方法在二维空间中寻找“V”形。如此lsquo;采用LSHP结构对“v”形进行拟合,验证了三维线段支撑区域的正确性,并保持了线段的精度。LSHP结构的结果如图所示。4(D);地点其中,颜色重叠表示来自不同视图的LSHP结构的重叠。
3.2.3.三维线支撑区域和LSHP结构的精化
如图所示。4(D)许多LSHP结构具有相同的直线结构。因此,执行一个组合过程来合并这些三维线支持区域和LSHP结构。然后,LSHP结构的边界由区域生长过程确定。最终的LSHP结构如图所示。
4.三维线支持区域提取
二维线支持区域提取在图像中已经得到了很好的研究。传统方法将梯度方向相似的边缘像素分组成线段。但是,尽管Re是几种能够在三维空间中提取尖锐特征点的方法,据我们所知,没有一种方法可以将这些特征点分组成线段,特别是对于包含场景的场景。植被和其他非多义性物体。
为了解决这一问题,我们将点云转换成不同视点的投影图像,从而考虑到二维线支持区域的提取。这些观点均匀地放置在点云周围的球体上。基于图像的方法降低了维数,避免了大规模点数据的三维邻域搜索。T型基于图像的方法也为三维线支持区域的提取提供了良好的分组结果。
投影图像的分辨率由等距表RES定义,投影图像的数目由K定义。第7节描述实验结果和RES的变化。
4.1点云投影图像
为了从投影图像中获得更好的二维线支持区域,图像必须包含清晰的边缘信息,即三维点云中的线结构必须与灰度相对应。投影图像的变化。
全局光照模型,例如环境遮挡模型,常被用来强调表面和边缘信息的浮雕。然而,此类模型通常需要复杂的预计算和需要。额外的信息,如法向量,因此不适合大规模无组织点云.。为了解决这一问题,我们采用了使用onl的眼睛穹顶照明(Boucheny,2009)。y深度缓冲信息,并在图像坐标空间中执行。其他技术,如屏幕-空间环境遮挡(SSAO)(Kajalin,2009),也可以用于我们的情况,但EDL p。更好的边缘感知(见图)。5)。
1对外形颜色的解释。4和8,读者可以参考本文的Web版本。
- (b) (c) (d) (e)
图4。我们的方法管道概述。(a)原始散乱点云。(b)具有边缘信息的多视点图像。(c)从图像中提取2d线支持区域。(d) LSHp结构提取的线状支撑区。(E)精化LSHP结构。
外形5.Cryt
全文共17141字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9663],资料为PDF文档或Word文档,PDF文档可免费转换为Word

