
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
直驱式PMSG风力发电机组的优化和直流矢量控制
摘要:随着电力电子技术的进步,直驱式永磁同步发电机(PMSGs)越来越引起风力发电机制造商的兴趣。 目前,商用PMSG风力涡轮机主要使用无源整流器,然后是绝缘栅双极型晶体管(IGBT)逆变器。 虽然带有两个背靠背电压源IGBT转换器的PMSG风力发电机被认为效率更高,但风力发电行业尚未广泛采用。 本文研究了具有两个并行电压源脉宽调制转换器的PMSG风力发电机的传统和新型矢量控制机制。 所提出的方法基于用于控制PMSG风力涡轮机的机器和电网侧转换器的直流矢量控制机构。 然后,针对PMSG最大功率提取,无功功率和电网电压支持控制的综合控制开发了最优控制策略。 使用SimPowerSystem进行瞬态系统仿真是为了研究在稳定和阵风条件下PMSG风力发电机的传统和提出的控制技术的性能。 本文表明,采用直流矢量控制结构时,PMSG系统在各个方面都有出色的表现。
关键词:直流链电压控制,直流矢量控制,电网电压支持控制,最大风能提取,最优控制,永磁同步发电机(PMSG)风力发电机组,无功功率控制,电压源换流器(VSC)等
第一章:介绍
风能是当今增长最快的可再生能源。风力发电机组运行在一个固定的或变动的速度[1]。大部分主要风力发电机制造商正在开发新的兆瓦级规模风力发电机,该风力发电机基于使用永磁同步发电机(PMSG)或双馈感应发电机(DFIG)的变桨距控制。
具有多极PMSG的变速风力涡轮机和满量程完全可控的电压源转换器(VSC)被认为是一个有前景的,但还不是很流行的风力涡轮机概念。这种PMSG配置的优点是1)无齿轮结构; 2)消除直流励磁系统; 3)最大限度提高风力发电和电网接口的完全可控性系统;4)容易实现故障穿越和电网支持。因此,基于VSC的PMSG的风力涡轮机的效率和可靠性被评估认为高于双馈风力涡轮机。由于电网代码的加强,PMSG风力涡轮机采用全VSC绝缘栅双极晶体管(IGBT)转换器越来越受到的风力发电产业的青睐。
然而,目前,商用的PMSG技术主要采用无源整流器,后接IGBT逆变器。为了PMSG风力涡轮机的高效率的矢量控制技术,使用全电压源IGBT转换器的配置仍在研究中,还没有被风电行业广泛采用。直流矢量控制技术是一种最近被开发用于仅在变速PMSG风力涡轮机中控制同步电动机的矢量控制技术和用于控制基于VSC的HVDC系统。相比常规的矢量控制策略,直流矢量控制在这些应用中已经表现出许多优点,如增强的系统稳定性,可靠性和效率。但直流矢量控制能否在PMSG风力涡轮机中用于控制PMSG机器和电网侧转换器(GSC),以及PMSG系统将如何在集成环境中运行来实现多个PMSG的控制目的尚不清楚。
本文提出了在直流dq向量控制配置下的PMSG风力涡轮机系统的最佳控制机制。然后,基于所提出的控制结构,PMSG系统的整体控制功能被开发,包括最大功率提取控制,直流链路电压控制,无功功率控制和电网电压支持控制。提出的控制机制被拿来与传统的矢量控制方法比较。接下来的部分,本文首先在第二节介绍了PMSG系统的一般配置和总体控制功能。接着,第三节介绍了PMSG机侧变流器(MSC)的常规和直流矢量控制设计。传统的直流矢量控制设计GSC在第四节中给出。第五节展示为了实现PMSG的最大风力功率提取,无功功率和电网电压支持控制的MSC和GSC控制集成。模拟研究于第六部分进行研究是为了调查并比较在稳定和变化的风况下提议的和传统的性能控制策略。最后,本文总结了要点。
第二章 PMSG机械/电气系统和集成控制
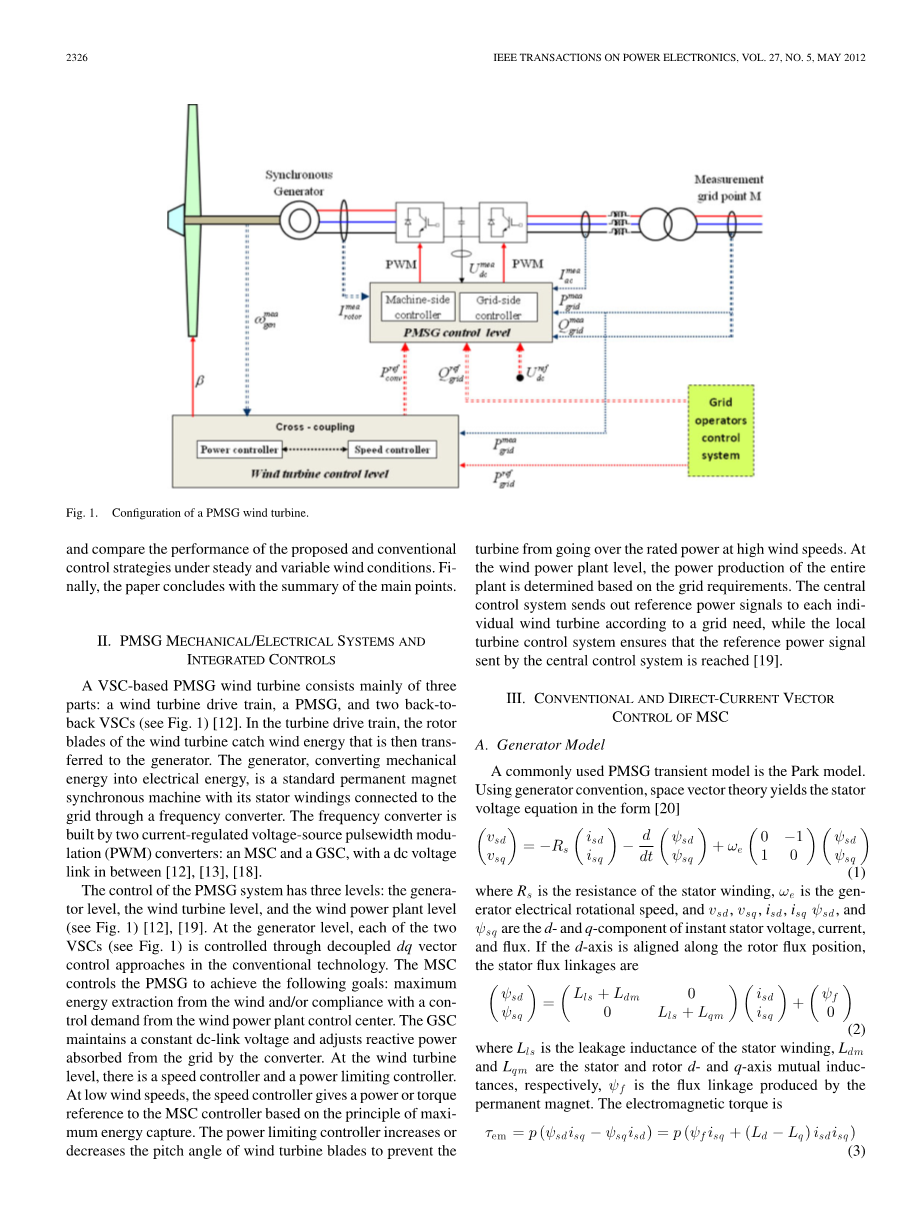
图1 PMSG风力发电机组的配置
基于VSC的PMSG风力涡轮机主要由三部分组成:风力涡轮机传动系统,PMSG和两个背靠背的VSC(见图1)。在涡轮传动系中,转子风力涡轮机叶片捕捉风能,然后转换成发电机。发电机将机械能量转化为电能,是一种标准的永磁体同步电机通过变频器与其定子绕组相连接电网。变频器是由两个电流调节电压源脉宽调制(PWM)转换器构成:一个MSC和一个GSC,之间有一个直流电压连接。
PMSG系统的控制有三个级别:发电机级,风力涡轮机级和风力发电厂级(见图1)。在发电机层面,两个VSC(见图1)都通过传统技术中的解耦dq矢量控制方法控制。MSC控制PMSG来实现以下目标:从风能中提取最多能量和/或遵守风力发电厂控制中心的控制要求。GSC通过转换器从电网吸收能量来保持恒定的直流母线电压并调整无功功率。在风力涡轮机级别,有一个速度控制器和一个功率限制控制器。在低风速时,速度控制器会基于参考MSC控制器的最大能量捕获原理,提供功率或扭矩。功率限制控制器增加或减少风力涡轮机叶片的倾斜角度,来防止风机在高风速下超过额定功率。在风力发电厂级别,整个电力生产电厂是根据电网要求确定的。中央控制系统根据电网需求向各个风力涡轮机发出参考电力信号,当地涡轮机控制系统确保由中央控制系统发送的参考功率信号。
第三章 MSC的传统和直流电矢量控制
A.发电机模型
常用的PMSG瞬态模型是Park模型。使用发电机惯例,空间矢量理论产生定子电压等式的形式
其中Rs是定子绕组的电阻,omega;e是发电机电旋转速度,vsd,vsq,isd,isqpsi;sd和psi;sq是瞬时定子电压,电流的d分量和q分量。如果d轴沿着转子磁通位置对齐,定子磁链是
其中Lls是定子绕组的漏电感,Ldm和Lqm分别是定子和转子的d轴和q轴的互感量,psi;f是由永久磁铁产生。电磁转矩是
其中Ld = Lls Ldm且Lq = Lls Lqm。在稳态条件下,(1)减至
通常,d轴和q轴之间的差异是相互关联的, 对直接驱动多极PMSG的电感非常小,并且定子绕组电阻要比同步电抗小得多。因此,(3)减少到(5),稳态定子的d-和q-轴电流由(4)给出
B.风力涡轮机模型 通过风力涡轮机从风中提取的机械功率由立方体法则方程表示为
其中rho;air是空气密度,Ablade是被转子叶片覆盖的区域,Cp是涡轮机的性能系数,vw是风速,Rblade是转子叶片的半径,以及omega;m是风力涡轮机转子的转速。表现系数Cp是顶端速度比lambda;(8)和转子叶片[24]的倾角beta;的函数。对于给定的风速和桨距角,有一个最佳的叶尖速比lambda;opt和一个最佳涡轮转速omega;mopt,其中Cp取最大值,即从风中提取最大功率,其倾斜角度
omega;m和omega;g(发电机转速)的关系以及omega;e在(9)中已给出,其中p是发电机极对。对于直接驱动的PMSG系统,ngear = 1。使用发电机配置,发电机和风力涡轮机的转速驱动转矩遵循
其中tau;w是参考发电机的涡轮机驱动扭矩,Jeq是发电机的总等效惯量,Ba是代表涡轮转动的主动阻尼系数损失。C. MSC的常规矢量控制
传统的MSC矢量控制方法有一个由更快的内部电流环和一个较慢组成的外环嵌套环结构,如图2所示[12],其中q轴回路用于风力发电机的转速或转矩控制,d轴回路用于其他控制目的。内部电流回路的控制策略是通过重写(1)和(2)得到的
(11)和(12)括号中的项被视为d和q回路中的电压和电流之间的状态方程,其他项被视为补偿术语[12],[25]。这种处理假定(11)中的vsd#39; 对isq#39; 没有主要影响,并且(12)中的vsq对isd的主要影响并不大。
图2传统的MSC矢量控制结构
但是这个假设是不充分的,解释如下。根据图2,最终控制电压v *sd和v *sq平方,与转换器输出电压Vsd和Vsq成线性正比,包括由电流回路控制器生成的d和q轴电压vsd和vsq,加上(13)显示的补偿项。因此,传统的控制配置是用分别用vsd#39; 和vsq#39; 来调节isd和isq 。但是,根据(5)和(6),d轴电压只对isq或转矩控制有效,而q轴电压仅对isd控制有效。
在传统的嵌套回路控制系统的设计中考虑以下问题。
1)为了防止MSC进入非线性模式,如果由内部产生的参考电压的幅度电流环控制器超过转换器线性模式的限制,则应用饱和机制 。总的策略是设置一个限制| v * sdq| 但保持如(14)所示的Lv * sdq不变,其中v * sd_ new和v * sq_ new是修改后的控制器输出电压的d和q分量 ,以及Vmax_ MSC 表示最大允许的dq电压。研究发现任何其他饱和机制可能会导致更多的系统操作系统瘫痪和不平衡
2)为防止MSC或发电机超过额定电流时,如果由外部产生的参考电流的幅度控制回路超过额定电流限制,则d轴电流参考值会被调整。 一般方法是保持q轴电流参考值i * sq不变,以保持风力涡轮机的控制效果,同时修改d轴电流参考值i * sd如(15)所示,来尽可能满足d轴控制需求。
- MSC的直流矢量控制
MSC的直流矢量控制策略也通过嵌套环控制结构(见图3)进行编程,包括以下三部分:1)从速度控制转化到电流控制; 2)直流电控制机制的开发;和3)从电流控制信号转换为电压控制信号。
图3 MSC的直流矢量控制结构
首先,通过基于(10)设计的速度环控制器来完成从速度到转矩控制的转换。然后,根据式(5)转矩控制被转换为定子q轴电流控制,而定子d轴电流被设置为零(即,最小定子电流控制战略)。
其次,由速度环控制器产生的d轴和q轴电流被用作内部电流回路控制器的参考信号。有必要指出,快速电流回路控制器对于同步发电机组在减少谐波和定子电流不平衡方面来确保高性能运行至关重要。虽然直接能量控制策略最近已被提出来用于控制DFIG风力涡轮机[27],[28],也有很多不足,如因为消除了电流控制回路[29],[30]而被发现的电能质量不足。但是,不像基于d或q轴电流误差信号(见图2)而输出的d轴或q轴电压的传统矢量控制策略,MSC的直流电矢量控制机制输出d轴和q轴调谐电流isd#39; 和isq#39; ,其中输入错误信号表明通过适量调整策略,控制器应该调整多少调谐电流。
第三,依据MSC的VSC结构,由电流环控制器转换到定子d轴和q轴的电压信号v *sd和v *sq产生的定子d和q轴调谐电流信号isd#39; 和isq #39; 来控制同步发电机。从电流到电压控制信号的转换是通过(16)实现,这相当于经低通滤波器处理后来减少直接施加d和q轴参考电压的振荡的瞬态dq(1)被直接应用到转换器。
信号处理技术应用于图3中测得的d和q轴电流,以防止d轴和q轴电流的高阶谐波进入控制器。此外,还有一个如下所示的非线性规划公式是为了达到交流电流和所需的d轴电流之间的误差最小化,同时防止产生的dq电流超过额定电流并防止转换器进入非线性调制模式[34]。该非线性规划公式的约束迫使q轴电流调整到所需值,将MSC相位均方根电流限制为IMSC等级,并保持线性调制约束。最小化:| isd - i*sd |依据:isq = i*sq
非线性规划策略在以下方式中得到应用。如果由外部控制回路产生的| i*sdq |电流超过额定电流极限,i *sd和i*sq根据(15)修改。如果由电流控制回路产生的| V *sdq |电流超过PWM饱和极限,v *sd和v *sq根据(17)修改。依据(5)和(6),(17)显示了为保持d轴电压参考值v *sd不变来维持风力涡轮机的速度控制效果的最佳策略,同时调整q轴电压参考值v *sq来尽可能地满足d轴控制的要求。但(17)不能应用于传统的控制结构(见图2);这可能会因传统的dq控制方法的竞争控制的性质导致主要振荡和不平衡问题。
第四章 GSC的常规和直流电矢量控制
A. GSC模型
图4显示了GSC的示意图,其中dclink电容在左边,而三相电压源,代表公共耦合点(PCC)处的电压的交流系统,在右边。在dq参考框架中,电网滤波器的电压平衡是hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;hellip;(18)其中omega;s是电网电压的角频率,Lf和Rf分别是电网滤波器的电感和电阻,vd,vq,vd1和vq1分别表示PCC电压和GSC输出电压的d轴和q轴分量,分别地,id和iq代表在GSC和交流系统之间流动的电流的d轴和q轴分量。
在PCC电压定向帧[12],[13],[18],[19]中,由GSC转移到电网的瞬时有功功率和无功功率与电网的d轴和q轴电流成正比,分别如(19)和(20)所示,而稳态有功和无功功率与GSC q-和d轴输出电压Vd1和Vq1成正比,分别如(21)所示[17]p(t)= vd id vq iq = vd id(19)q(t)= vq id -vd iq = -vd iq(20)P = VdVq1 / Xf,Q = Vd(Vd1-Vd)/ Xf。(21)
- GSC的传统矢量控制
传统的GSC矢量控制方法如图5所示[12],[17],[35],有一个由更快的内部电流环和一个较慢的外环组成的嵌套环结构,其中d轴环路用于直流链路电压控制,而q轴回路用于无功功率或电网电压支持控制。内部电流回路的控制策略是由改写(18)开发vd1 =(Rf id Lf·did / dt) - omega;sLfiq vd(22)vq1 =(Rf iq Lf·diq / dt) omega;sLfid(23)其中(22)和(23)括号中的项被视为d-和q -轴循环上的电压和电流之间的状态方程,其他项被视为补偿术语[12],[35]。这种处理假定(22)中的vd1对iq没有主要影响,并且对
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[466953],资料为PDF文档或Word文档,PDF文档可免费转换为Word

