
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
并网双馈感应发电机的建模与小信号分析
Francoise Mei, Student Member, IEEE, and Bikash C. Pal, Senior Member, IEEE
摘要—本文描述了并网双馈感应发电机的建模和小信号分析,针对不同的假设(两种或一种质量的传动系统,带有或不带有定子瞬变),制定并比较了不同的模型。 这些模型是根据基本磁链,电压和转矩方程式开发的。 进行线性化模型的特征值和参与因子分析,以将DFIG机电模式与其相关状态变量相关联。
关键词-双馈感应发电机,非线性动力学模型,小信号模型,特征值分析。
一 简介
随着全球趋势以及希望将更多的风能集成到电力系统中,迫切需要合适的风力发电机动力学模型。对于双馈感应发电机(DFIG),在大多数情况下,这导致了许多论文(例如[1]-[5])提出了非线性动力学模型。由于控制设计是一个主要问题,因此小信号分析可以提供有关DFIG属性,限制和控制选项的有价值的信息。本文介绍了网格连接的DFIG的小信号分析。为此,推导了系统非线性动力学模型。然后,介绍了其线性化和特征值分析。在第二部分中,公式化了DFIG的相电压方程。在第3-4节中,指定了本文中使用的dq转换,并获得了用于稳定性研究的dq模型。在第5-7节中,介绍了电磁转矩推导,传动系和变矩器模型。在第八节中,建立了潮流方程,以完善系统数学模型。在第九节中,针对不同的假设集制定了不同的模型。最后,在第十节中,将模型与它们的特征值分析结果进行比较。
二 abc形式的DFIG方程
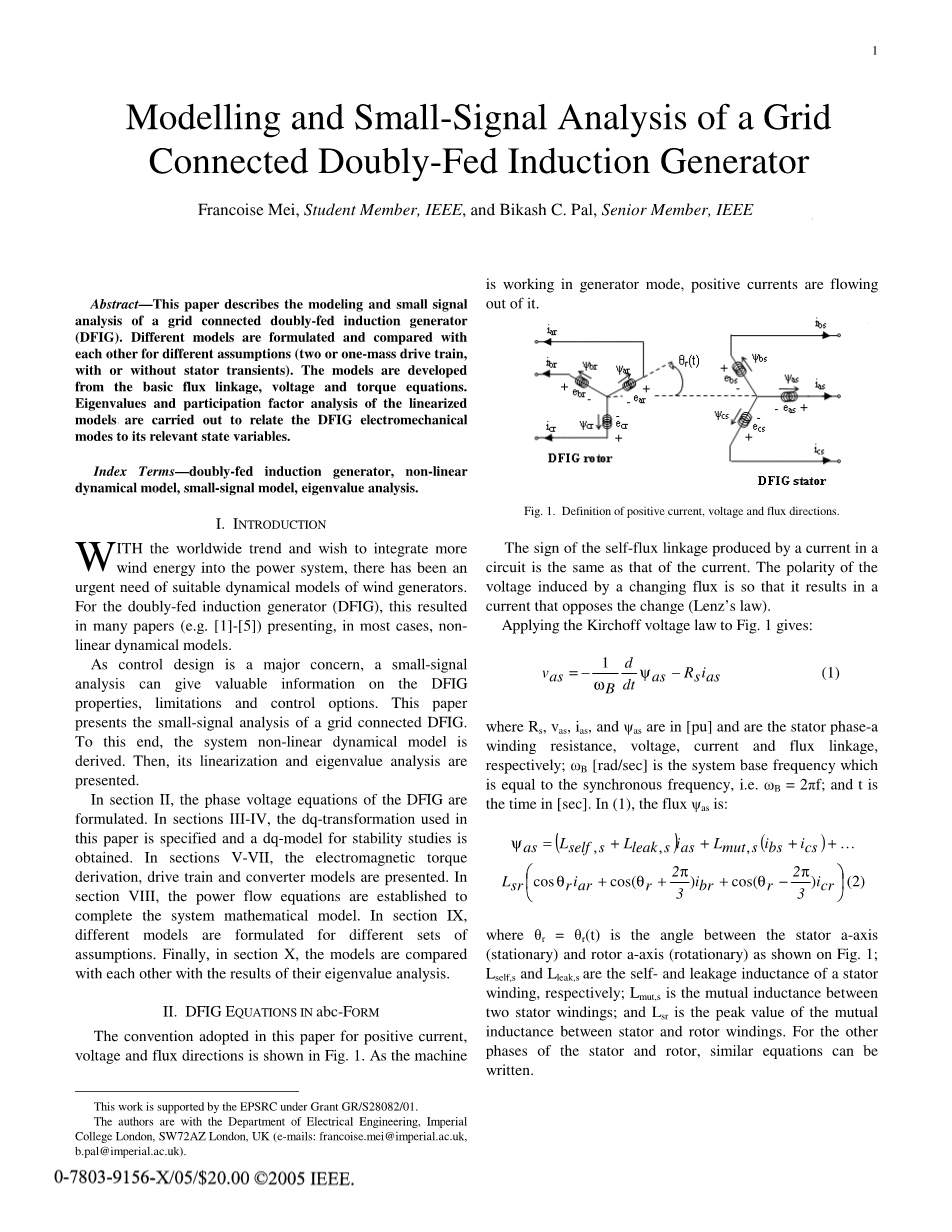
本文为正电流,电压和磁通方向采用的约定如图1所示。由于机器在发电机模式下工作,正电流从中流出。
图1.正电流,电压和磁通方向的定义
电路中的电流产生的自磁链的符号与电流的符号相同。由变化的磁通量感应的电压的极性使得它产生的电流与变化相反(伦兹定律)。图一根据基尔霍夫电压定律可以得出
其中Rs,vas,ias和psi;as以mu;为单位,并且分别是定子相a的绕组电阻,电压,电流和磁链。omega;B[rad / sec]是系统的基本频率,等于同步频率,即omega;B=2pi;f;t是以秒为单位的时间。在(1)中,通量psi;as为:
theta;r=theta;r(t)是定子a轴(静止)与转子a轴(旋转)之间的角度,如图1所示;Lself,s和Lleak,s分别是定子绕组的自感和漏感;Lmut,s是两个定子绕组之间的互感;Lsr是定子和转子绕组之间互感的峰值。对于定子和转子的其他相,可以写出类似的方程式。
三 abc-dq转换
A.转换矩阵
为了简化控制,将三相变量转换为dq变量。 用矩阵表示法,我们有:
其中vqd0 = [vq vd v0],vabc = [va vb vc],Ttheta;是abc到dq的转换矩阵。 在本文中,选择了幂不变变换,并且d轴领先q轴(IEEE针对同步机的建议[9])。 图2示出了相对于定子3轴框架的dq框架。 相应的变换矩阵在(4)中给出。
Ttheta;是正交的,因此逆变换矩阵为Ttheta;的转置。
B.dq形式的B.DFIG方程
将(4)应用于(1)-(2)以及定子和转子的另一相
等式给出了以[pu]为单位的DFIG dq模型:
在(5)-(8)中,omega;是dq帧的旋转速度,即。omega;=dtheta;/ dt其中theta;=theta;(t)是d轴与定子a轴(图2);omega;r是转子,即omega;r=dtheta;r/ dt。对于同步旋转框架,omega;是同步速度,因此在[pu]omega;=omega;s= 1且(omega;–omega;r)=(omega;s–omega;r)= somega;s其中s是滑差。在(9)-(12)中,Lss =Lself,s 泄漏,s-Lmut,s和Lm = Lsr。
四 用于稳定性研究的DFIG dq方程
在稳定性研究中,机器通常表示为瞬态阻抗后面的电压源。式(5)-(12)可以被重写,以便DFIG表示为图3.为此,(5)-(8)中的定子和转子磁通为用(9)-(12)消除,以下新变量是定义:
进行一些替换后,[pu]中的DFIG模型变成:
五 电磁转矩
DFIG产生的瞬时总有功功率是定子和转子有功功率之和:
其中Ps和Pr是vqds.iqds *的真实部分*和vqdr.iqdr *分别。 使用vqds = vqs jvds,iqds = iqs jids,vqdr = vqr jvdr和iqdr = iqr jidr,我们有:
将(5)-(8)替换为(26)-(27),得到:
前两项与机器损耗相对应,后四项与与磁通量变化相关的功率,后四项与气隙功率,即从机械形式转换为电形式的功率。通过将气隙功率除以DFIG转子的机械速度即可获得电磁转矩Te。这样做并使用(9)-(12)给出[pu]:
将(LmLrr / Lrr)iqsids项相加和相减得出DFIG模型要使用的Te [pu]表达式(5)-(12):
将(13)-(14)替换为(30)会给出与DFIG模型(17)-(24)一起使用的Te的另一个等效表达式:
六 .驾驶火车模型
A.两质量模型如涡轮,变速箱,发电机,轴等传输分量建模为两个质量Ht和Hg(Htgt; Hg)在同等水平的四肢轴,根据力学理论得出:
其中Ht和Hg [s]是涡轮机和发电机的惯性omega;t和omega;r[pu]是涡轮和DFIG转子速度,而Tsh [pu]是轴扭矩:
在(35)中,theta;tw[rad]是轴扭转角,K [pu / rad]是轴刚度,D [pu.s / rad]阻尼系数。
将(35)代入(32)-(33),并得出omega;r=(1-s)omega;s,给出传动系统2质量模型:
其中Te由式(31)给出。
一质量模型
如果涡轮,齿轮箱,轴和发电机集总一起变成等效质量Htot [s][pu]中的方程式对传动系统进行建模:
其中Te由式(31)给出。
七。 转换器模型
在本文中,连接在DFIG转子和电网之间的转换器由两个PWM电压源逆变器(VSI)组成,这些逆变器由直流链路隔开,如图4所示。电网侧转换器会改变其调制指数m2,以保持 直流电压Vdc恒定,并以统一的功率因数运行,即只有定子提供所需的无功功率以维持端子电压(定子电压); 转子侧变流器注入适当的转子电压,以使DFIG速度等于其参考值(确定该值,以便DFIG提取出机器极限内的最大风能)。 转换器被认为是无损设备,并且由于其频率范围比电力系统中所关注的频率范围高得多,因此未对开关动力学进行建模稳定性研究。
图4. DFIG转子和电网之间的背靠背转换器。
m1和m2是调制指数。
在大多数论文中,直流母线电容器的动态性能并不高。表示,Vdc假定为常数。 在这里,作为验证,直流电容器的微分方程为已添加到DFIG模型。为此,我们首先建立交流与交流之间的关系。PWM-VSI的直流变量如图5所示。在实际单位中,我们有[6]:
其中VLNrms [V]是交流线与中性点的均方根电压,幅度调制比为m,而VDC [V]是直流电压。 交流侧和直流侧之间的功率平衡以[VA]表示:
其中Irms [A]是交流rms电流,IDC [A]是平均值直流电流。 将(40)代入(41)得到:
图5.幅度调制指数为m的PWM-VSI。
在前面的部分中,导出了DFIG方程在[pu]中,因此让我们为转换器采用[pu]表示法通过定义以下等式:
其中Vdc和Idc为[pu],Vbase,1ph和Ibase为1相DFIG的基本电压和基本电流。 因此,对于图4[pu]中的以下等式成立:
直流环节电容器的微分方程为:
使用(45)-(48),(49)变为:
由于Vs = nTVr2并且Ir3 = Ir2 / nT,其中nT是变压器匝数比(图4),我们有:
如果忽略了直流环节电容器的动态特性(Vdc常数并且dVdc / dt = 0),则(51)减小为有功功率转子和电网侧之间的平衡。 电流幅值Ir3衍生如下。
八。 与网格的接口
为了完成网格连接的DFIG的模型,两个必须添加更多的代数方程,即之间的有功和无功功率交换方程DFIG和网格。
A. dq到DQ的转换
电网电压和电流相对于参考DQ帧(松弛总线),而DFIG变量以机器dq帧表示。 因此,当编写与电网相连的DFIG的功率方程,从一帧到另一帧的转换应该被应用适当地。
图7显示了机器dq框架相对于无限总线(松弛总线)DQ帧,其中delta;是角度在q轴和Q轴之间。 可以看到dq-和DQ变量之间的关系是:
图7.相对于松弛总线DQ帧的机器dq帧。
- 电网侧的潮流
在本文中,网格通过其戴维宁等效值建模,即线电抗Xe后面的无限母线,如图8所示。更强的网格通过较小的Xe值(较高的短路率)建模,反之亦然 。 从图8可以看出,网格绘制的功率(pu)为:
其中gamma;是DFIG定子电压与无穷大之间的夹角总线电压。
在更详尽的电源系统研究中,电源系统将是由多个总线组成的网络。在这种情况下,(54)和(55)的右侧将由DFIG总线上的潮流方程(PFE)给出。
C. DFIG侧的功率流
图8显示了并网的DFIG的功率流:
其中Ptot和Qtot在(54)-(55)中给出; Ps和Pr在(26)-(27)中给出; Pdc,即瞬态期间流过直流电容器的功率,可通过将(51)乘以Vdc来获得; Qs是vqds.iqds *的虚部; QT是变压器消耗的无功功率,即:
电流幅值Ir3从下面得出。
图8.电网连接的DFIG的功率流。
D.电流I r3
交流电流Ir3ang;gamma;Ir3由Kirchoff确定网格和DFIG之间的连接点的当前定律。从图8可以得出:
其中
-(55)中给出了Ptot和Qtot。 在(63)的变换中使用了(52)-(53)。
九。 网格连接DFIG的DAE
A.数学背景
可以写出电力系统的数学模型作为一组微分代数方程(DAE):
其中x,z和u是状态变量的列向量,代数变量和控制输入; f和g分别是微分方程和代数方程的列向量。在瞬态研究中,(64)-(65)同时求解。该解决方案在时域中给出x,z和u,并允许系统输出的计算:
其中y是输出的列向量,h是输出代数方程的列向量。
在小信号研究中,(64)-(65)在操作点周围线性化,A矩阵的特征值分析(在附录中定义)可以评估系统的小信号稳定性。在两项研究(瞬态和小信号)中,要做的第一步都是系统的初始化。这分两个步骤完成。首先,通过将DFIG总线视为PQ或PV总线来计算电网侧的潮流。然后,使用获得的解,通过求解时间导数项等于零且受控输出等于其参考值的(64)-(65)来初始化DFIG。
B.学习系统DAE研究系统
研究系统如图8所示。参考Q轴与松弛总线电压Vbang;0对齐。因此,如果将电机q轴与定子电压Vsang;gamma;对齐,则方程 前面的部分可以简化,因为:
其中delta;是q轴和Q轴之间的角度,而gamma;是DFIG总线电压与松弛总线电压之间的角度。
表I总结了针对不同假设集的不同网格连接DFIG模型的DAE。
表一
图8中带同步旋转的dq框架,定子电压对齐的DFIG的DAE
对于时域中的动态仿真,必须将系统和控制输入模型添加到表I的DAE中。此处,系统输入为机械转矩Tm(取决于风速和涡轮机特性),控制输入为 转子电压vqr和vdr(取决于DFIG控制模型)。 根据应用(例如瞬态故障分析),时间响应比较将指示选择哪种DFIG模型(即哪些假设被认为是可以接受的)。
C.学习系统初始化
如果提供电压控制,则DFIG总线为PV总线,即将Ptot和Vs指定给电网和潮流溶液得到Qtot和gamma;。 对于图8的学习系统,潮流方程只是(54)-(55)。由于DFIG速度受控制,因此转差s受控制输出。 因此,在稳态下,它等于其参考值:
设定点s *取决于指定的功率输出Ptot遵循:如果Ptot是DFIG的标称功率,则速度等于标称速度; 如果Ptot小于标称DFIG功率,速度等于最佳值,取决于涡轮Cp的性能特征,提取最大的风能; 即:
此外,由于电网侧转换器控制直流链路电压,Vdc也是受控输出,因此:
其中Vdc *是一个常数,由下式给出:
在(73)中,m1,ref是在参考情况下(设计选择)对应于转子电压Vr,ref [pu]的转子侧转换器调制指数。 例如,为了有足够的变化余量,我们可以选择m1,ref = 0.75 for Vr,ref = Vs,rated / n其中Vs,rated是DFIG定子额定电压,n是DFIG定子-转子匝数比。
其余8个变量(iqs0,ids0,vq0,vd0,omega;t0,theta;tw0,vqr0和vdr0)是通过同时求解f和g以及零时间导数项,如上定义的受控输出和如上获得的潮流解来确定的。 由于表I的模型仅动态变化,因此它们的初始工作点(x0,z0,u0)相同。
对于附录中给出的参数,表II列出了一些稳态值,分别对应于Ptot = 1 [pu],Vs = 1 [pu]和snom = –0.03 [pu]。
表二
图8的DFIG的初始值, PTOT = 1 [PU],VS = 1 [PU],SNOM = -0.03
SG =强网格(Xe / Xm = 0.01),WG =弱网格(Xe / Xm = 0.1),Vs0 =Іvsqd0І,Is0 =Іisqd0І,Vr0 =Іvrqd0І,Ir0 =Іir
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237640],资料为PDF文档或Word文档,PDF文档可免费转换为Word

