英语原文共 11 页
自主可再生能源系统的能源管理
摘要:
本文介绍了一个致力于可再生能源的控制和生产管理系统。优化从可再生能源提取的能量,并有效地控制电池的充电和放电时该系统的主要成果。本文开发了一种基于模糊逻辑的算法来确定每个源的参与程度。然后我们通过开发安装在系统中的电源转换器中的控件,以正确管理和响应来自管理算法的指令。为了验证这种技术,提出了仿真结果。
1.介绍
能源稀缺,发电成本增加以及能源需求不断增长需要现代电力系统的最佳经济调度。可再生能源组合的最佳管理通常用于未连接到公共电网的区域中,作为发电的柴油发电机的补充或替代。能源管理的主要目标是有效满足负荷的能源需求,促进可再生能源的发展和优化成本。已经进行了若干研究以通过调整系统的大小或不同来源的影响程度来克服这些问题。[1][2][3][4]文献中有几项关于能源管理的研究。他们有一个共同的目标:不断满足安装需求,确保最大限度地利用可再生能源产生的能源,最大限度地降低能源产生的能源成本,并最大限度地减少电池充电和放电的额外周期以及超导(如果存在的话)[5][6]。他们已经研究了不同的设计d 可再生能源,以满足负荷,同时优化安装成本。为此,我们必须考虑到储存设施的高成本以及阳光和风速的性质,这极大地影响所产生的电力的质量。因此,我们必须设计光伏板,风力发电机和电池。因此,它需要一个很好的尺寸光伏板,风力发电机和电池。 Borowy和al[7]提出了一种在混合系统中优化光伏板和电池尺寸的方法。系统针对不同的组合进行模拟,并计算发电损失的概率(LPSP)。在[8]Koutroulis 法进行优化。对于我们的研究,我们建议使用[9]Wang等人给出的结果来确定可再生能源和电池的尺寸。经济方面在这里没有得到很好的处理,但这个系统确保了可靠的电力供应。
- 系统不同部分的建模和尺寸
这里考虑的混合系统旨在满足低功率负载。 负载的平均每小时电力需求。 本工作假设风力发电机额定功率为1kW。 这里的尺寸目标是最小化可再生能源产生的电力与负载在一段时间T内所需的电力之间的差异。多可再生能源可以是独立的或连接到公共网络。自治混合网络有不同的拓扑结构[1]。
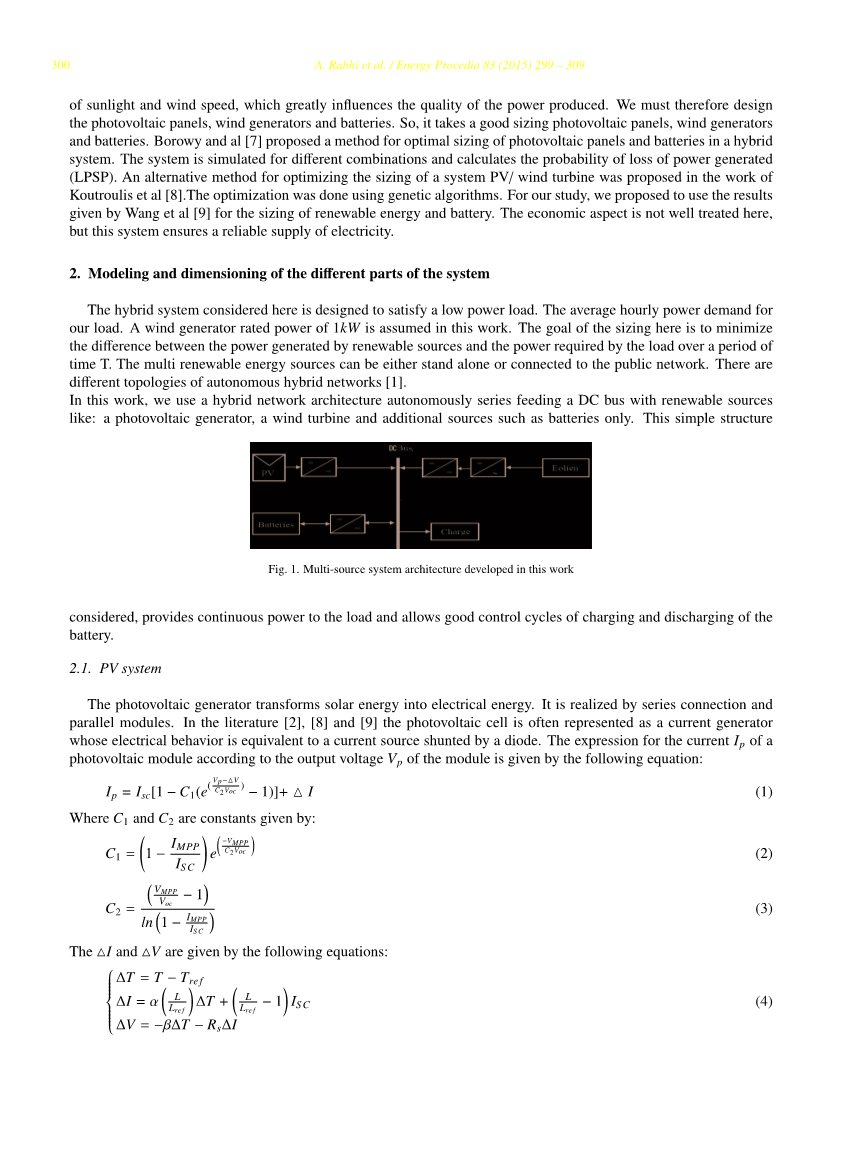
图1.这项工作中开发的多源系统架构
在这项工作中,我们使用混合网络架构自主地为DC总线提供可再生能源,如:光伏发电机,风力涡轮机和其他来源,如电池。考虑这种简单的结构,可以为负载提供连续的电力,并且电池具有良好的充电和放电控制周期。
-
- 光伏系统
光伏发电机将太阳能转换成电能。它通过串联和并联模块实现。 在文献[2],[8]和[9]中,光伏电池通常表示为电流发生器,其电气特性等于二极管分流的电流源。 根据模块的输出电压Vp表示光伏模块的电流Ip由下式给出:
(1)
此处与是连续的值:
(2)
(3)
和由下式给出:
(4)
alpha;和beta;分别是电流和电压的温度系数。 L 和 分别是太阳辐射和太阳辐射参考(W / m2)。 T 和分别是电池的温度和参考温度(℃)。 和分别是电流和短路峰值功率(A)。 和分别是电流和短路峰值功率(V)。是串联电阻(Omega;)。
2.2 DC / DC降压转换器
如果我们不尝试工作到最大功率点,那么存在于所有单向可再生能源中的DC / DC转换器可以确保提取最大功率或调节提取的功率。 鉴于太阳能电池板的电压大于直流母线电压,我们建议使用降压转换器。 与PV相关联的降压转换器的模式由图2给出。
图2.降压转换器的原理图
当前的表达式由下式给出:
(5)
使用降压转换器的模型由下式给出:
(6)
2.3 风力涡轮机
这里提出的风能转换系统包括风力涡轮机,同步电机永磁体(PMSM),AC / DC转换器和DC / DC转换器(降压)。这种结构基于三相二极管桥和转换器降压,以适应整流的直流电压。
图3.风转换系统
从风中提取的机械功率通过以下等式计算:
(7)
其中R是风力涡轮机的半径[m],是其转速[rad / s]。
功率系数Cp的特性取决于特定速度lambda;。 本工作中使用的模型基于论文[3]由下式给出:
(8)
其中和分别是来自Park变换的单极直流和正交三相电流的分量,是电角速度,和L分别是定子绕组的电阻和电感,P是数量 MSAP的极点,J是旋转部件的惯性矩,是定子电流产生的磁通量,是直流母线电压,uw是所用转换器占空比的简单函数(对于这种配置) : = 1 /delta;,是来自涡轮机的电流并注入直流母线,是涡轮机产生的机械扭矩。
2.4 电气存储系统
2.4.1电池
文献中有各种各样的模型电池。 在这个论文中,我们提出了一个简单的模型,并描述了电池在充电和放电方面的行为,如图4所示。电池被视为源电压随其充电状态而变化。 这根据电池的电流而变化。 如果它是正的(电池放电)那么状态将减少并且如果为负(电池充电)则放电然后充电将增加。 [5] [6]
图4.铅酸电池的电池的等效电路图
2.4.2 DC / DC双向
双向转换器控制在两个方向上流动的电流,并且在这种情况下允许调节充电电流或电池的放电以满足负载的需要。 图5给出了这项工作中使用的双向转换器的一般方案。电流在这里:
(10)
图5.双向转换器Buck-Boost
The means model of bidirectional converter is given by:
(11)
2.5 直流母线
两个串转换,光伏和风能以及蓄电池的耦合是通过直流总线实现的,如图6所示。其状态模型由下式给出:
(12)
图6.通过直流母线耦合光伏系统,风和电池
- 多源系统的管理算法和功率估计
混合系统控制中最重要的问题之一是管理不同来源对能源的影响。 鉴于我们系统的架构,我们的管理目标减少到:
- 最大限度地利用可再生能源产生的能源
- 满足负载的能量需求;
- 最小化电池的充电和放电循环;
- 避免过度充电或放电;
- 避免将电池装入或放电超过其当前的最大充电或放电。
为此,我们提出了一种基于模糊规则的管理算法。 该算法以功率的形式产生不同源的参与程度以满足负载的能量需求。 知道了所需的总线电压,就可以轻松获得每个源控制的电流基准,并且转向DC / DC转换器以确保控制不同源的电流与参考电流,同时保持直流母线电压在24V。 在这项工作中使用了akagi-Sugeno方法[11]。 决策变量是:
(13)
他们的主要职能由图7给出,其中:
图7.(a)输入变量e1的隶属函数(b)输入变量e2的隶属函数(c)输入变量SOC的隶属函数
bull;dPmax:电池在充电或放电时可接受的最大功率差异,对应于:
在这项工作中,我们认为最大电流为15A,直流母线电压必须调节到24V,这给出:dPmax = 360W;
bull;SOCmin是电池放电的最低可接受水平,相当于20%; bull;SOCmax是电池允许的最大负载水平,等于80%。
bull;NG:功率差异是负的和大的
bull;N:功率差异小而负
bull;P:功率差异小而且积极
bull;PG:功率的差异是正的和大的
bull;char:电池已充电
bull;dech:电池已放电
bull;规范:电池正常运行
模糊规则如表1所示,它们直观地选择,结构与使用全有或全无规则的算法结构相同,从而满足前面所见的相同目标。
|
输入变量 |
输出变量 |
|||||||
|
e1 |
e2 |
SOC |
PPV |
PW |
Pbat |
|||
|
PG ou P |
/ |
Char |
Pload |
0 |
0 |
|||
|
PG |
/ |
norm ou dech |
Pload Pmax |
|
0 |
minus;Pmax |
||
|
P |
PG |
norm ou dech |
PPV |
max |
Pload Pmax minus; PPV max |
minus;Pmax |
||
|
P |
P |
norm ou dech |
PPV |
max |
PW max |
Pload minus; PPV maxminus; PW max |
||
|
N |
PG ou G |
char |
PPV |
max |
Pload minus; PPV max |
0 |
||
|
N |
PG |
norm ou dech |
PPV |
max |
Pload minus; PPV maxminus; Pmax |
minus;Pmax |
||
|
N |
P |
norm ou dech |
PPV |
max |
PW |
max |
Pload minus; Pre max |
|
|
N |
N ou NG |
dech |
PPV |
max |
PW |
max |
0 |
|
|
N |
N |
char ou norm |
PPV |
max |
PW |
max |
Pload minus; Pre max |
|
|
N |
NG |
char ou norm |
PPV max |
PW max |
Pmax |
|||
表1.能源管理的模糊规则
- 控制电源转换器
<stron
资料编号:[5361]</stron

