
英语原文共 5 页
摘要 -交流伺服驱动中的一个常见问题是希望将磁场定向所需的位置反馈传感器作为实现全闭环速度和位置控制的唯一传感器。由于通常使用的位置传感器(光学编码器和电磁分解器)本身不会产生真实的瞬时速度测量,因此通常使用一些信号处理技术来估计每个采样瞬间的速度。然后将该估计信号用作速度回路控制的速度反馈信号。本文分析了这些方法的局限性,并提出了一种最佳估计每个采样瞬间速度的方法。结果表明,该方法可以显著改善命令驱动系统,降低量化角度分辨率的影响,从而限制了所有数字伺服驱动器的最终性能。由于交流伺服驱动器正确运行所需的高电流环路带宽,因此噪声降低尤其与交流伺服驱动器相关。进一步证明了该方法比传统的直流转速表具有更好的测量性能。
引言
所有交流伺服定位驱动器都需要一个转子位置反馈传感器来实现磁场定向,从而以类似于直流电机的方式产生与速度无关的扭矩[1]。已经证明,磁场定向所需的转子位置分辨率()大大低于位置回路控制通常所需的分辨率()[1]。
由于位置传感器已经存在,而且要增加一个单独但直接耦合的速度传感器既昂贵又有机械方面的困难,大多数驱动器开发商更喜欢从位置测量传感器信号估计速度。因此,一个反馈传感器既可用于磁场定向的电机控制,也可用于机电速度和位置反馈控制回路。
这种方法的有效性通常受到速度估计方法的精度和量化限制的限制。这是因为速度回路是最内层的状态回路,其性能通常必须优于外层的状态回路。这种性能意味着速度回路的状态反馈增益高于位置和集成位置误差回路,并且速度回路生成器的误差通常不能通过较低的性能位置和集成位置误差回路纠正。
速度回路的较高增益要求将导致速度量化直接显示为扭矩产生电流分量命令()中较大(且不必要)的变化(具有显著的RMS值)。这对于交流驱动器尤其重要,因为需要大电流环路带宽来实现磁通量和电流矢量的适当瞬时磁场方向[1],[5]。
应该注意的是,信号滤波不是一个普遍接受的波纹抑制解决方案。与滤波器相关的滞后会大大降低闭环性能。在某些应用中,尤其是那些干扰转矩没有显著变化的应用中,性能下降可能是可以接受的。一个值得注意的例子是交流硬盘驱动器,它不应该看到任何动态干扰扭矩。然而,在许多位置伺服驱动器中,速度环的动态性能不可以受到影响,必须找到一种解决量化问题的替代方案。
本文首先讨论了常见的基于传感器的解决方案。这些解决方案的局限性导致了对当前使用的软件速度估计方法的局限性的考虑。然后介绍了速度观测器的应用,它是一种在对系统速度进行高估计的同时,以可控的方式减少量化效果的方法。通过对一种基于软件的机床伺服控制器的实验结果的介绍,将设计方案扩展到考虑一般情况下的干扰效应和干扰终点。
基于传感器的解决方案
通常用于磁场定向机器的位置传感器包括光学编码器(增量和绝对)和电磁分解器(固有绝对)。由于需要绝对转子位置反馈来实现去耦,旋转变压器通常是同步电机的首选。两种装置都测量机械位置,而不是速度。有角型和线性型两种。本文的讨论仅限于控制旋转对称交流电机的角度测量。
这两种技术都不能直接测量速度。为了从位置测量中估计速度,通常使用基于过去位置的某种递归算法。这些算法可以通过混合模拟/数字硬件或软件实现。硬件技术取决于传感器,因为每种传感器的具体设计属性不同。软件技术一般不依赖于传感器。
两种传感器的硬件技术通常都是锁相回路策略的变化。在这种策略中,一个压控振荡器(VCO)被驱动产生一个高频,当它被分解时,将与传感器输出信号相比较(或混合),产生相位误差信号,用于控制VCO的输入。然后,VCO的模拟输入将表示估计速度的频率到模拟转换([2]就是一个例子)。
这种技术的局限性在于,它们必须检测位置误差(实际的综合速度偏差)才能估计速度。它们无法识别请求系统响应的实际扭矩命令输入。相反,它们会一直等到响应发生,表明输入扭矩必须发生变化。实际上,这些技术将已知的扭矩命令输入视为未知的干扰扭矩。因此,在加速或减速期间,它们通常会滞后于实际速度。
如果离散时间-速度回路的采样周期与载波频率(用于分解器)和低速(频率)操作(用于编码器)不同步,则可能会出现进一步的问题。异步采样引起的调制可以产生低频项(模式),即使速度实际上是恒定的。闭环位置伺服系统将拍频感知为低频扰动响应,并试图减小其视在量级。因此,实际位置误差将产生以抵消调制误差。
基于位置数据的软件速度估计方法
为了估计速度,最简单的算法是基于与微分学中导数极限定义相同的形式:
(1)
其中t是速度环的采样时间间隔,k是采样数指数。这种估计有一些重大的局限性:
精度:它只是估计最后一个采样间隔的平均 速度。在由指令扭矩突然变化引起的 加速期间,这种估计显然是错误的。
量化:直接受到传感器角度分辨率和采样时 间的限制:
(2)
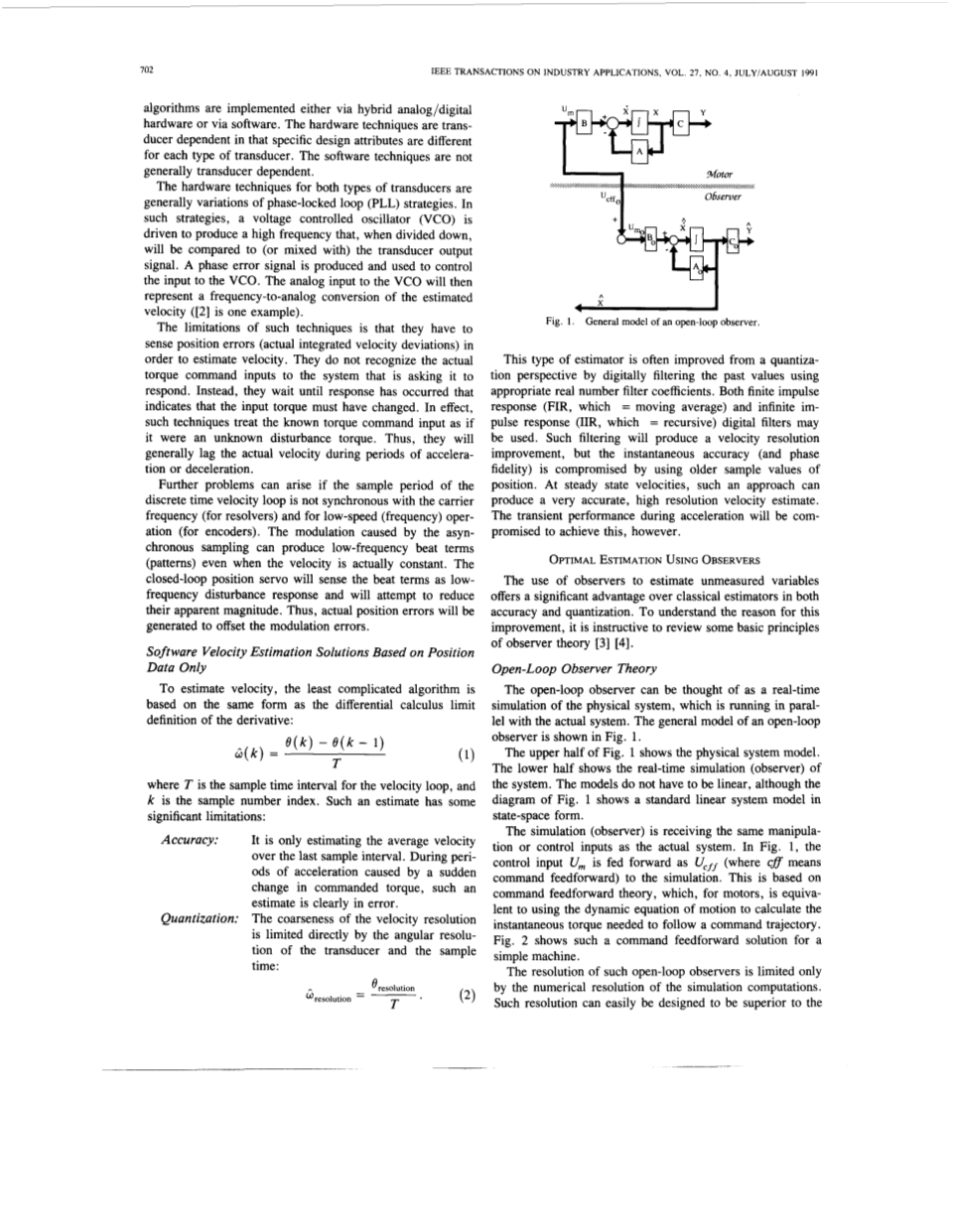
图1.开环观测器的一般模型
这种估计量通常是从量化的角度改进的,通过使用适当的实数滤波系数对过去的值进行数字滤波。可以使用有限脉冲响应(FIR,即移动平均值)和无限脉冲响应(IIR,即递归)数字滤波器。这种滤波将提高速度分辨率,但使用较旧的位置采样值会降低瞬时精度(和相位保真度)。在稳态速度下,这种方法可以产生非常精确的高分辨率速度估计。然而,加速过程中的瞬态性能将受到影响,以实现这一点。
基于观测的最优估算
使用观测器估计未测量的变量在精度和量化方面都比传统的估计方法有很大的优势。为了理解这种改进的原因,回顾观察者理论的一些基本原理是有指导意义的[3][4]。
开环观测器理论
开环观测器可以看作是与实际系统并行运行的物理系统的实时仿真。开环观测器的一般模型如图1所示。
图1的上半部分显示了物理系统模型。下半部分显示了系统的实时仿真(观测器)。虽然图1的图表显示了一个状态空间形式的标准线性系统模型,但是模型不一定是线性的。
仿真(观测器)接收的操作或控制输入与实际系统相同。在图1中,控制输入,作为(其中表示命令前馈)前馈给模拟。这是基于指令前馈理论,对于电机来说,这相当于使用动态运动方程来计算跟随指令轨迹所需的瞬时转矩。图2显示了一个简单机器的命令前馈解决方案。
图2.模拟扭矩命令前馈运动控制
这种开环观测器的分辨率仅受仿真计算的数值分辨率的限制。这种分辨率可以很容易地设计为优于反馈装置。这种开环方法的局限性在于只有当观测器模型及其参数与实际物理系统相同时才是正确的。这种方法仍然有用,但可以通过在观测器上关闭循环来改进。
闭环观测器理论
在观测器上闭环可以降低开环形式的参数灵敏度。图3显示了一个一般的闭环观测器,其中测量的输出“Y”现在作为对观测器的命令输入,作为开环观测器的前馈命令输入的补充。
将测量值作为对观测器的命令输入,与前馈输入和观测器开环参数产生的仿真(观测器)估计值进行比较。增益项被用于强制模拟的估计输出,收敛于表示测量值的值。因此,可以强制未测量变量的估计值收敛于实际值的合理估计值。
注意观察者具有类似于系统及其控制器的动态特性和结构,如图4所示。观察者轨迹跟踪由前馈输入提供,正如前馈输入为系统提供轨迹跟踪一样。观察者的干扰抑制动力学现在正由增益项进行调整,正如增益为系统提供干扰抑制一样。
图3.闭环观测器的一般模型
图4.系统及其控制器的命令跟踪和干扰抑制动态模型
因此,将观测器视为一个跟踪滤波器是合适的,它可以通过设计来调整以减少纹波。
最优速度观测器
为了将这种方法应用于速度估计,开发了一个简单的连续域速度观测器,如图5所示。
图5.连续域速度观测器
图6.离散时间,计算机控制,速度观察器实现
从图5可以明显看出,由磁场定向控制器控制的机器的电磁扭矩输出现在充当着对观察者的前馈操纵输入。量化的测量位置也作为状态命令输入给观察者。在给定增益和的情况下,估计的速度由观测器的闭环操作产生。
连续域观测器可以在模拟硬件中实现。然而,在离散时间计算机控制器中,软件中实现观测器通常更为方便。图6显示了离散时间观测器实现的配置。
速度观测器特性
前馈转矩输入对观测器的影响是保证速度观测器在施加转矩时会像电机一样“加速”。因此,观察者的速度估计不需要过去的位置来调整系统的指令加速度输入。与传感器或仅位置滞后估计方法不同,速度观测器的瞬时精度是可能的。图7中的模拟结果证明了这种效果。
图7.观察者在加速期间改善了响应
测量位置输入命令对闭环观测器的影响是保证观测器收敛到与测量值相同的位置值。
接近与测量值相同的位置值。增益和的作用是确定闭环观测器收敛到与测量值相同的位置值的速度。然而,这些相同的动态特性决定了测量位置输入命令中存在的量化噪声被过滤的程度。因此,在“调整”观测器时,收敛和量化噪声降低的动态性能会被抵消。在任何情况下,速度估计的分辨率都受到数值处理精度的限制,而不是反馈装置的分辨率。
使用观测器仿真的所有实际物理输入,以及使用电机参数的最佳估计,可以从观测器获得最佳可能的“最佳”估计。这种“充分利用所有现有知识”(包括扭矩输入)的概念是基于观测器的最佳估计与经典传感器或仅位置滞后估计方法的主要区别。
增强速度估计
速度观测器可以通过在观测器中考虑稳态扰动载荷的影响而得到增强。为此,需要与系统控制器所需的设计方法完全相同。必须添加一个附加的控制器状态(集成位置错误)。图8显示了如何将状态添加到驱动控制器。图9显示了如何将相同的状态添加到连续域观测器的拓扑中。
图8.向驱动器添加集成状态以拒绝稳态负载
图9.向观察者添加积分状态以估计稳态负载
实验调查及结果
为了研究速度观测器的性能,在软件控制的伺服定位驱动器上安装了光电编码器和直流转速计。编码器还连接到一个基于硬件锁相环的频率到直流硬件速度估计器。利用基于锁相环的速度反馈,实现了速度、位置和综合位置误差的闭环控制。这使得速度控制独立于观测器和直流转速表。如图10所示,构造了离散时间(浮点软件)速度观测器。
离散时间观测器是一个精确的系统模型,在理论上又称为“脉冲不变”离散时间建模。因此,应该注意的是,模型并非在模型的所有阶段都遵循相同的积分方程,而是遵循精确离散时间建模所需的积分方程。选择增益以获得最佳动态性能,而不产生过冲。所有的根都被设计成在实际的轴上,在这个点上增益的进一步增加会导致一些超调。
图10.具有附加状态积分器的离散时间速度观测器
图11.直流测速频谱,谐波纹波(7 V/k r/min,160 r/min)。
图12.基于编码器的观测器谐波纹波谱(2048 ppr,
160转/分钟)
观察者的软件是使用Motorola68881数学协处理器在浮点执行的。仅出于测试目的,速度观测器信号(数据字)通过12-B D/A转换器发送。摩托罗拉68000用于速度、位置和集成位置误差环路闭合软件。图11和12分别显示了来自直流转速表和基于编码器的浮点观测器D/A输出的光谱比较。
结果表明,浮点数速度观测器可以显著改善脉动。最严重的纹波分量已从1.67%降至可忽略的值。两次测量的低频含量相似。这一较低的频谱代表了编码器空间谐波(在观测器和基于PLL的速度估计器中都存在,因为两者都使用同一个编码器进行控制)对闭环的综合影响,以及由机器纹波转矩的实际空间谐波引起的速度误差。
结论
开发的高分辨率速度观测器演示了以下属性:
①速度观测器产生的谐波纹波比直流转速表产生的谐波纹波小得多(3%的0-峰值总规范)。纹波仍然存在,似乎与编码器误差和电机转矩空间谐波有关。编码器空间误差不能完全消除,因为它们出现在向观察者输入的命令中,并且在速度和位置循环的带宽内。编码器硬件锁相环速度估计器中也存在同样形式的纹波。
②电机运行明显更平稳,速度观测器也更安静。
③速度观测器的稳态性能至少与编码器硬件或直流转速表一样好。加速过程中的动态性能比任何一种方案都要好。
参考文献
[I]D. W. Novotny and R. D. Lorenz (Eds.), 'Introduction to field orientation and high performance ac drives,' in Tutorial Course Rec. Ann. Mtg. IEEE Industry Applications Soc., 1985, 1986.
[2] ILC Data Device Corporation, 'SDC-19100 monobrid series technical notes,' undated.
[3] B. Friedland, Control System Design. New York, McGraw Hill, 1986.
[4] R. D. Lorenz, 'Linear systems analysis,' in Tutorial Course Rec. Dyn. Contr. ac Drives (Univ. Wisconsin-Madison), Aug. 3-6, 1987.
[5] R. D. Lorenz and D. W.

