
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
限速条件下基于一致性的车辆队列控制
摘要
在这篇文章中,提出了一种适用于车辆队列控制的分布式一致控制方法。在形式化的基础共识问题中, 考虑了实际的车辆动力学模型,实现了两个连续车辆之间基于速度的间距方法。作为一个特例,该方法考虑了车辆之间的双向交互,从而提高了队列内车辆之间的凝聚力。挑战了在引入排内车辆速度限制的情况下对队列内动力学的指数稳定性进行了评估。实验采用了一个由纵向配备无线车间通信和雷达传感的自动化车辆组成的三车排验证了理论结果。
关键词: 一致性,分布式控制,智能交通系统,车辆队列,速度限制。
一 简介
一方面,社会需要清洁、安全和高效的交通系统,另一方面,需要将这些系统改善到有足够的能力来防止交通堵塞,这使得近年来人们对自动驾驶产生了浓厚的兴趣。此外,计算、传感和通信技术的进步支持并增强了人们对自动交通系统的兴趣。自动驾驶的主要目标是优化交通流量,降低总排放[1],提高交通安全[2]。
协同自适应巡航控制(CACC)系统潜在地促进实现道路交通的自动化。在[3]-[6]中描述了特定实现的CACC系统,用于控制一个车辆队列。这些系统除了车载测量外,还采用了无线车对车通信,允许在较小的车间距离内通信。在实现车辆近距离跟随时,串排行为稳定,即,沿队列的扰动衰减,也希望和[4]一样。在短跟随距离内可以显著提高道路交通吞吐量。
在[4]和[5]中描述了一个确保字符串稳定行为的CACC实现示例,其中底层的交互拓扑是单车前瞻拓扑。也就是说,每辆车只使用它的对应前车的信息。虽然这种连接结构在许多应用中是有用并实用的,但在某些情况下,希望在队列中车辆之间的交互拓扑设计中能具有更大的灵活性。特别是,在一辆车的前瞻拓扑中,不会通知领导车辆追随者的状况。相反,利用跟随车辆的信息可以潜在地提高队列一致性。为了支持这一说法,设想一个真实的场景,在该场景中,队列的车辆有不同的限制速度或加速度。特别是,重型车辆可能重量不同,因为负载变化导致不同的速度和加速度限制。这种速度或加速度限制的差异可能会导致在队列内车之间单向交互拓扑结构的情况下,一个的队列意外解体。双向方案可能会提高队列一致性,但也会产生不利影响,如小间距对稳定性的影响[25]、[29]。
这可以通过在一个框架中形式化队列控制问题来解决,该框架在交互拓扑方面提供了更大的灵活性。为此,一个车辆队列可以被视为一个动态车辆系统的互联网络,通过底层通信和传感网络进行交互。由于这些联网车辆的目标是在相同速度和车辆间距离的条件下实现同步行为,因此队列控制问题与现有的系统理论框架(如共识 [7]和概述[8])保持一致,请参阅[9]中分布式多智能体协调的概述,以及最近在四组件框架[27]下的车辆队列控制概述。
最近的文章中,队列控制问题确实被纳入了一个分布式一致控制框架[10]-[12]、[25]、[26]。在这些文字中,大多数都考虑了队列内两辆连续车辆之间的恒定距离间距策略。然而,在交通流量、安全性和干扰衰减方面,恒距间距策略并不优于[13]、[14]。此外,在[15]-[17]中研究了对车辆执行器故障或有界控制输入的鲁棒性,这可以看作是对速度传感器的限制。在对执行器故障[15]的研究中,曾假定存在临时或周期性的致动器故障。结果,当执行器故障是永久性的时,代理组将会崩溃。这不是本文所开发的方法的情况。
在作者之前的论文中,车辆跟随问题被建模为一致性寻求问题[18]。本文的贡献是将这些结果扩展到队列成员在动力能力方面不一致的情况下。实际上,重点在于解决某些队列成员速度能力有限时的队列一致性问题。通过一个适当的局部控制器的设计以及采用交互拓扑,它表明,队列可以自动识别这种限制和调整其行为的车辆与有限的功能。本文采用纵向车辆动力学模型如[4]、[12]、[19]、[26]。该模型考虑了汽车驱动线动力学的影响,是一种比较现实的模型。此外,与[10]、[12]、[25]和[26]所做的工作相比,车辆间距策略被认为是速度相关的。给出了在队列中存在约束车辆的情况下,整个队列动力学指数稳定性的形式化分析。通过一个基于仿真的案例研究,验证了该网络控制策略的性能,并通过三车实验装置验证了其可行性。
本文的提纲如下。第二节简要概述了协商一致控制的准备工作和问题的引出。在第三节中,提出了一种分布式控制方法来解决队列动力学的指数稳定性问题。在第四节中,引入了速度限制,再次给出了队列动力学的指数稳定性。分析结果在第五节的仿真研究中得到了验证,第六节给出了一个三车排的实际可行性研究结果。最后,第七部分给出了本文的主要结论。
二准备和问题陈述
A 图论
在动态系统网络中建立信息交换模型的一种方法是使用所谓的图表。图由一个节点(如节点)组成。集合V ={1,bull;bull;bull;bull; bull; bull; , n},边缘集合Eisin;Vtimes;V。在无向图中,节点i到节点j的边的存在意味着节点j到节点i的边的存在,即,信息链接是双向的。在有向图中,至少有一对节点具有单向信息链接。无向图称为连通图,如果在任何一对不同的节点之间通过图的边(可能通过其他节点)存在路径。对于有向图,要区分连通图和强连通图。一个有向图被称为强连通,如果通过图的边在任何一对不同的节点之间存在一条路径。如果在替换所有定向通信链路时,任何不同的节点对之间都存在路径,则有向图称为连通的在图中通过无定向通信链路。一个有向图包含一个所谓的有向生成树,如果至少有一个节点通过图的边有一个指向所有其他节点的有向路径。这样的节点称为根。边集E可以用邻接矩阵G = [gij]isin;Rntimes;n with i, j isin; V.来描述。如果边集包含从节点j到节点i的边,则元素gij = 1;否则gij等于0。图论中的另一个基本矩阵,可由邻接矩阵G导出,称为拉普拉斯矩阵L=[lij]isin;Rntimes;n。这个矩阵定义为
(1)
拉普拉斯矩阵L满足条件
(2)
对于无向图,拉普拉斯矩阵L是对称正半定的。然而,对于有向图,对称性不成立。当有向图包含有向生成树或无向图连通时,拉普拉斯矩阵L只有一个特征值为零。这个单一的零特征值与满足Laplacian矩阵的右特征向量wisin;r相关联n
(3)
alpha;哪里? = 0。除了描述网络拓扑结构的拉普拉斯矩阵L外,还定义了一个固定矩阵P = [pij]isin;Rntimes;n。钉扎矩阵P是一个对角矩阵,它定义了对网络[20]中的一个节点的钉扎。这个固定元素通过在特定节点上放置内部反馈,将网络中所有节点的一致状态“固定”为所需的一致状态。钉扎矩阵的对角元素为0或1,满足以下方程:
(4)
这意味着只有一个节点的状态固定在一个固定的值上。在第三节提出的方法中,这意味着一个节点除了交互作用外,还会因为Laplacian矩阵的选择而产生内部反馈。
接下来,给出了具有单积分器动态特性的一组节点(或系统)的简单一致控制策略的一个例子,以说明一致控制的原理。
B单积分器动力学的一致控制律考虑具有动力学的系统网络
(5)
其中q(t)isin;R是系统i的状态,u(t)isin;R是控制输入。在[7]和[21]中,给出了这组系统的一致性的控制规律
(6)
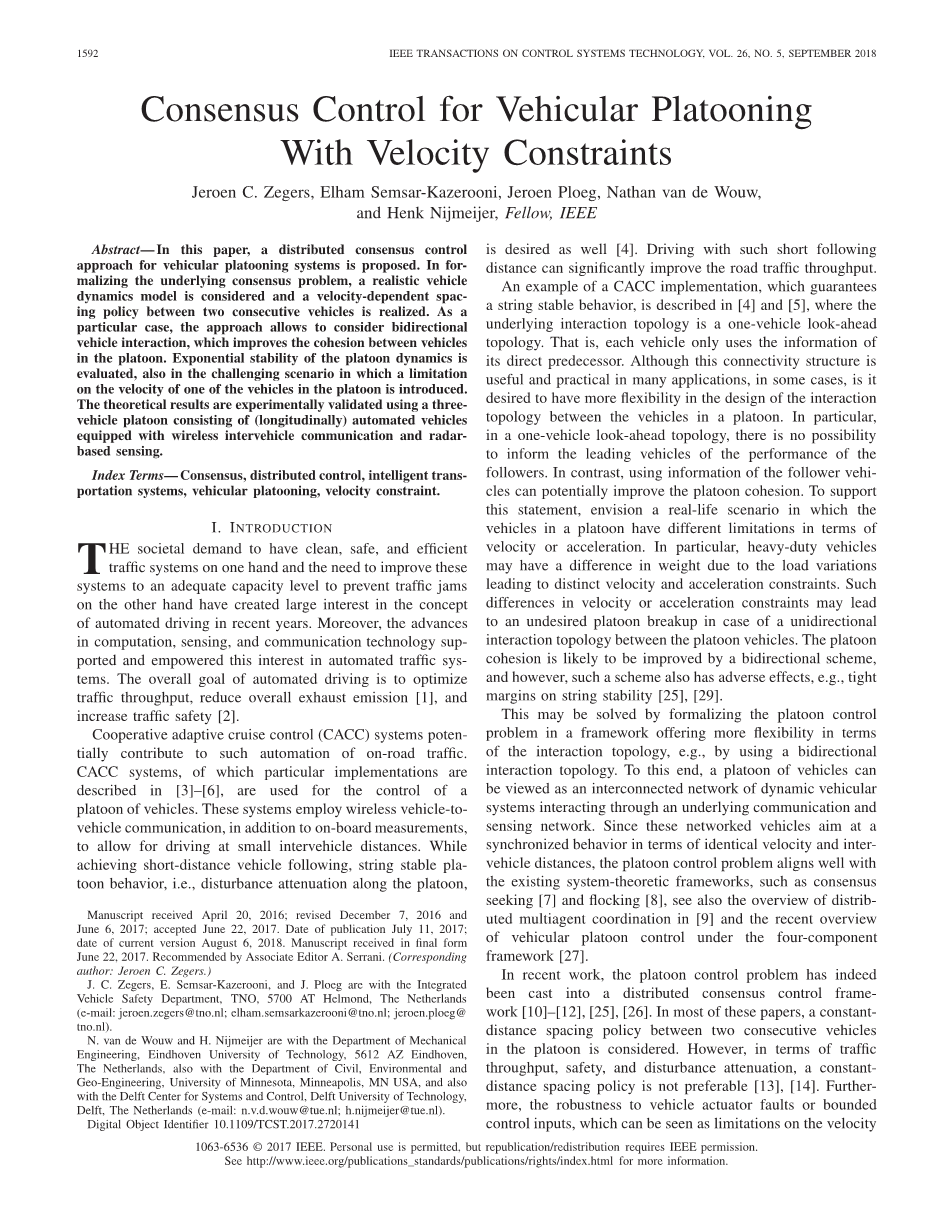
无花果。1.一个车队的俯视图。虚线箭头:(固定)前馈u(t)的通信拓扑uiminus;1 (t).虚线箭头:(变量)用于共享状态xi (t)的信息的通信拓扑。
其中gij为描述网络连通性图的邻接矩阵G的元素。通过引入集总状态向量q(t) = (q1(t)hellip;qn(t)) t,由式(5)和式(6)给出的闭环动力学表达式为
(7)
q˙ = minus;Lq
其中邻接矩阵G的元素与拉普拉斯矩阵L的关系定义如式(1)所示。如果拉普拉斯矩阵L只有一个特征值为0,即,对应的无向图被连通,或者对应的有向图包含有向生成树,则可以表示n个系统[21]之间达成了一致,即
(8)
因此,所有的状态指数收敛到一个共同的值,这取决于初始条件。后一个值与拉普拉斯行列式的零特征值有直接关系。
当添加一个固定元素时,这个公共值被约束为一个期望的值,因此,它不依赖于初始条件。在第II-C节中给出了另一种解释,其中考虑了与车辆排程范围相关的更真实的动力学模型,并引入了速度依赖的间隔策略。
C 队列动力和受控目标
以n辆车为例,如图1所示,其中xi (t)为共识状态向量,定义如下,di (t)为车辆i与前车iminus;1之间的距离,qi (t)、vi (t)和ui (t)分别为车辆i的(后保险杠)位置、速度和控制输入。请注意,除了n辆车外,还引入了索引i = 0的虚拟参考车,如下所述。虚线箭头表示协商一致状态向量x j (t)从车辆j到车辆i的通信,用于分布式协商一致控制,目的是实现闭环的排稳定性。此外,虚线箭头表示控制输入uiminus;1(t)从车辆iminus;1到车辆i之间的通信,这表示在CACC系统[4]中常用的单车辆前瞻前馈,下面将对此进行更详细的描述。需要在两辆连续车辆之间采用以下速度相关的间距公式:
(9)
其中rge;0和h gt;分别为静止距离和期望时间间隔,V ={1,bull;bull;bull;,n}为全排车辆集合。已知间距策略(9)可提高道路效率[1]、安全性和干扰衰减[13]、[14]。间距误差可以定义为
= (qiminus;1(t) minus; qi (t) minus; lv ) minus; (r hvi (t)), i isin;V
(10)
其中lv为车辆长度。如前所述,引入了一个索引i = 0的虚拟参考车,这样也为排中的第一辆车定义了误差ei (t)。纵向车辆动力学采用[4]、[12]、[19]:
tau;是积极的代表驱动系动力学常数,phi;是一个致动器延迟,ai(t)是车辆加速度。与[10]和[11]所采用的二重积分动力模型相比,s动力模型更真实地表达了纵向车辆动力学。假设tau;=所有车辆队列,即,考虑了车辆的均匀动力响应。这并不一定意味着我们考虑一个完全均匀的队列,因为队列中的车辆的速度能力可能由于速度限制而有所不同,这将在后面介绍。还要注意虚拟参考车,即,车辆i = 0,具有与队列中其他车辆相同的动力,如式(11)所定义。因此,在实践中,虚拟参考车也可以被实际的引导车所取代。控制目标是确保闭环系统的排动力学达到指数稳定的平衡。
(12)
对于u0(t) = 0。这个控制目标意味着,当虚拟参考车v0(t)的速度变为恒定速度vmacr;0 (u0 = 0)时,所有的内切距离误差ei (t)都收敛到0,因此(10)-(12)也成立
(13)
控制目标由(12)和(13)定义,通过基于共识的控制方法实现,如第三节所述。在速度约束v f (t)le;vmax lt; v0(t)的情况下,控制目标是自动将排速度调整到虚拟参考车辆速度v0(t)的最小值和车辆f的最大速度vmax,即
(14)
这意味着当没有速度约束时,队列速度减小到虚拟参考车所要求的速度vmacr;0,或者当存在速度约束时,队列速度收敛到vmax。第四节对此作了解释。
三 基于一致的框架的指数稳定性
在这一节中,提出了一种分布式控制方法来实现排控制目标(12)和(13),并给出了闭环排动力学的指数稳定性条件。为了简单起见,假设(11)的致动器延迟phi;等于零而设计一致的控制器。在第五节和第六节的模拟和实验中研究了这种延迟的影响。为了可读性,从现在开始,省略时间参数t。令误差如式(10)所定义,其一阶导数和二阶导数叠加在状态向量中
(15)
微分i(t),同时使用(10)和(11),给出了
(16)
利用(16)可以得到误差动力学的表达式如下:
(17)
其中A和B定义为(11),ei (t)定义为(10)。在车辆输入ui (t)上引入以下预补偿器:
(18)
通过前馈uiminus;1(t)和新的输入umacr;i (t),其中uiminus;1(t)是由车辆i通过无线通信获得的,如图1所示(虚线箭头所示),得到如下误差动态图:
(19)
备注1:式(18)中uiminus;1(t)项的前馈是为了补偿式(17)中误差动力学中上述uiminus;1(t)项。这大大改善了排动力学的输入干扰衰减特性。这意味着只有一辆车的前瞻策略是前馈,但是下面的方法给出了用于新输入umacr;i (t)反馈设计的通信拓扑的自由度。
受II-B节所述共识控制理论的启发,在(18)中对新的输入umacr;i (t)进行了如下的分布式控制器介绍:
(20)
其中xj(t)由车辆i通过附加的通信链路获得,用邻接矩阵G=[gij]isin;Rntimes;n来描述。pii表示锁住矩阵P的对角元素(如第II-A节所述),kT = (kp kd kdd)是控制器增益向量。图1中可以观察到实现分布式控制术语umacr;i (t)的通信拓扑结构的一个例子(用虚线箭头表示);但是,下面给出的分析对于分布式控制器的任何通信拓扑都是有效的。
备注2:对于umacr;i (t)的分布式控制术语的选择(第20个术语中的第一个术语)是基于这样一种愿望,即解决追随者车辆之间的交互作用,并在队列中车辆之间的交互作用中保持灵活性。(2
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[425915],资料为PDF文档或Word文档,PDF文档可免费转换为Word

