英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
碰撞评估沿海雷达监测的新方法
马枫
摘要:对于沿海雷达监测,文章提出了一种数据驱动的方法来初步判断雷达光斑的碰撞概率,它基于两个因素:它成为一艘移动的船舶以及所处位置发生碰撞的可能性。第一个因素是由无回路有向图(DAG)决定的,它的节点代表信号的特征,包括速度、航向和形状。此外, DAG的结构和条件概率表(CPTs)可从已验证的样本中训练得到。随后,利用人工势场模型,在航道中的障碍可以被描述为碰撞可能性的范围,相应的系数可以按照历史船舶分布进行训练。然后,另一个因素,任何位置的碰撞可能性位置是通过对所有可能存在碰撞的领域进行重叠得到的。为简单起见,只有静态障碍才会被考虑。最终,这两个因素的特征作为证据,通过将雷达光斑与Dempster规则相结合来估计它们的碰撞概率。通过碰撞的概率将雷达光斑进行排列,那些造成对安全的较高威胁能够提前提醒雷达操作员。特别是,一个好方案在方法的提出和人工操作之中因为一个初步测试而被发现。
关键词:碰撞概率;贝叶斯网络;人工势场;海事雷达;非线性优化;Dempster规则
1.背景
海事雷达在海岸监督方面是一个有效的侦查工具,它不要求被监管船舶给予任何回复。除此之外,海事雷达也能探测到浅滩、浮标和其它障碍物。通过海事雷达,所有的船舶和障碍物以自己对应的特征在雷达屏幕上以光斑的形式显示出来,包括形状、速度、方向以及轨迹。在日常管理中,这些特征被用来进行目标的提取和识别。目前,一些其他的海事追踪系统已经被发明出来了,包括自动识别系统(AIS)以及海事卫星。但是,AIS的报告频率对于海事的实时监管来说太低了;而且不是很多船舶都具有卫星发射器。因此,海事雷达仍然是海事监管系统的核心工具。
事实上,有相当大的比例的雷达光斑或者目标是由于噪声或静止物体造成的。在内河水道和港口,虚假的和静止的目标甚至比真实的移动中的船舶还要多。因此,雷达操作员必须从过多的光斑中手动鉴别移动中的船舶。然而,即使一个光斑被确认是一艘正在移动的船舶,它也可能并不需要过多的关注。例如,一艘船舶远离桥墩、礁石、障碍物以及其他船舶通常就是安全的;在日常管理中,它并不需要过多的关注。事实上,只有一个光斑可能是一艘真实的移动着的船舶并且对安全构成威胁才需要密切观察。特别是,在这里对安全造成的威胁一般指的是碰撞的可能性,所以避免碰撞是雷达监视的主要目的。
大多数海事雷达整合了自动雷达标绘仪(ARPA)的功能用于目标跟踪。然而,真实性以及目标的碰撞势态不能被ARPA的功能立即获得。比如,一种新型的沿海监视雷达系统能够跟踪距其5海里外、0.5平方米大小的目标。但是,它的ARPA功能不能判断这个0.5平方米大小的目标是一艘真实移动着的船舶,或者仅仅是一个漂浮在水面上的不重要的物体。目前,一个目标的碰撞概率的可靠性只能通过雷达操作者的经验来进行判断。当观测中有大量目标时,这种人工操作将变得不切实际。比如,在中国长江南通段,航道中每天有接近20000艘船舶通过。很显然,人工地、一个接一个地验证目标是不可能办到的。基于人工操作的流程,本研究旨在开发一个数据驱动的方法来帮助雷达操作者初步识别目标,以便于提升他们的监督管理效率。
值得强调的是雷达对碰撞概率的监督与通常意义上有所不同。在传统的研究中,碰撞概率是由速度、旋转速度、航向、船舶遭遇以及环境因素决定的。然而,雷达测量的航向和速度并不是完全可信的。当在碰撞估计中使用它们时,可能容易引发假警报。但是,从雷达获得的目标的位置是相对可靠的。因此,雷达操作员在估计光斑的碰撞概率时总是将位置作为一个重要的因素。例如,当一个光斑或者目标位于一个危险的区域时,就应该吸引更多的关注而不去考虑它是否只是一个噪声。相反,如果一个目标位于主要航道以外的开放水域,对安全造成的威胁有限,它就可能会被雷达操作员忽略。特别是,对于某一位置上面的碰撞的可能性实际上是由周围的障碍与环境所决定的,其中包括滨水区、泊位、水深、码头、浮标、浅滩以及遭遇的船舶。很显然,这些因素总是在变化的。结果是,对不同位置的碰撞可能性的估计仍然需要雷达操作员的经验。
总的来说,关于人工操作,在初步识别具有很高碰撞概率的光斑时,主要有两个潜在因素。第一点是光斑成为真正移动着的船舶的概率;另一点是它所处的位置相应的碰撞概率。
第一个因素可以从它的特征中提取得到。例如,一个光斑在以一个通常的速度移动,就可能是一艘移动着的船舶。这个推理过程是基于光斑的速度和操作者的经验而形成的。事实上,这样的经验被认为是从长期的观察中积累得到的先验信息。在这种情况下,研究中建立一个概率模型是比较合适的。在不同类型的概率模型中,贝叶斯网络(BN)被认为是严格有效的。特别,它具有学习结构的能力以及验证样本相关系数的不确定性。
另一个因素,或者说某一位置的碰撞概率,是更加复杂的。一般来说,在海事研究中讨论的术语“碰撞风险”通常被认为是碰撞概率和碰撞影响的产物。然而,这种影响涉及到了船舶的很多详细信息,例如舵角、货物类型以及船上的人员数量。这些信息是很难在雷达监测中得到的。事实上,VTS操作员的主要目的是避免在没有考虑碰撞后果的情况下的所有的碰撞可能。因此,本研究只考虑对碰撞概率的研究。
在相关的研究中发现,对碰撞概率的估计通常是基于宏观视角或者是船舶操控的。这些宏观视角包括航道设计、港口工程和决策。相关的方法必不能够在相邻的位置上微观描述碰撞概率的连续变化。例如,这些方法可以用来在设置限速的桥区估计碰撞的总体概率;但是他们不能描述在桥区相距50米的两个点之间的碰撞概率的区别在雷达观测中,这种微观评估是至关重要的。另一个传统研究的视角是基于船舶操作研究碰撞概率,这就需要更多的船舶操纵的信息。所描述的这些信息大多数都是雷达监测所不知道的。因此,传统的碰撞概率评估方法不是很适合本研究进行讨论的观点。
参照机器人领域的研究,此类问题可用人工势场(APF)解决,它不需要障碍物的详细信息,并且将碰撞概率描述为一个连续函数。几十年来,APF模型已广泛应用在机器人的路径规划和操从方面,它被认为是简洁高效的。
总之,本文旨在提出一种智能的方法,利用BN和APF模型初步估计雷达光斑的碰撞概率。本文剩余部分组成如下。第二节用于介绍雷达光斑的特征和碰撞概率评估上的传统研究。第三节提出新的评估方法。第四节通过一个案例研究验证提出的方法。第五节总结全文。
2文献综述
2.1 海事雷达光斑的不确定性
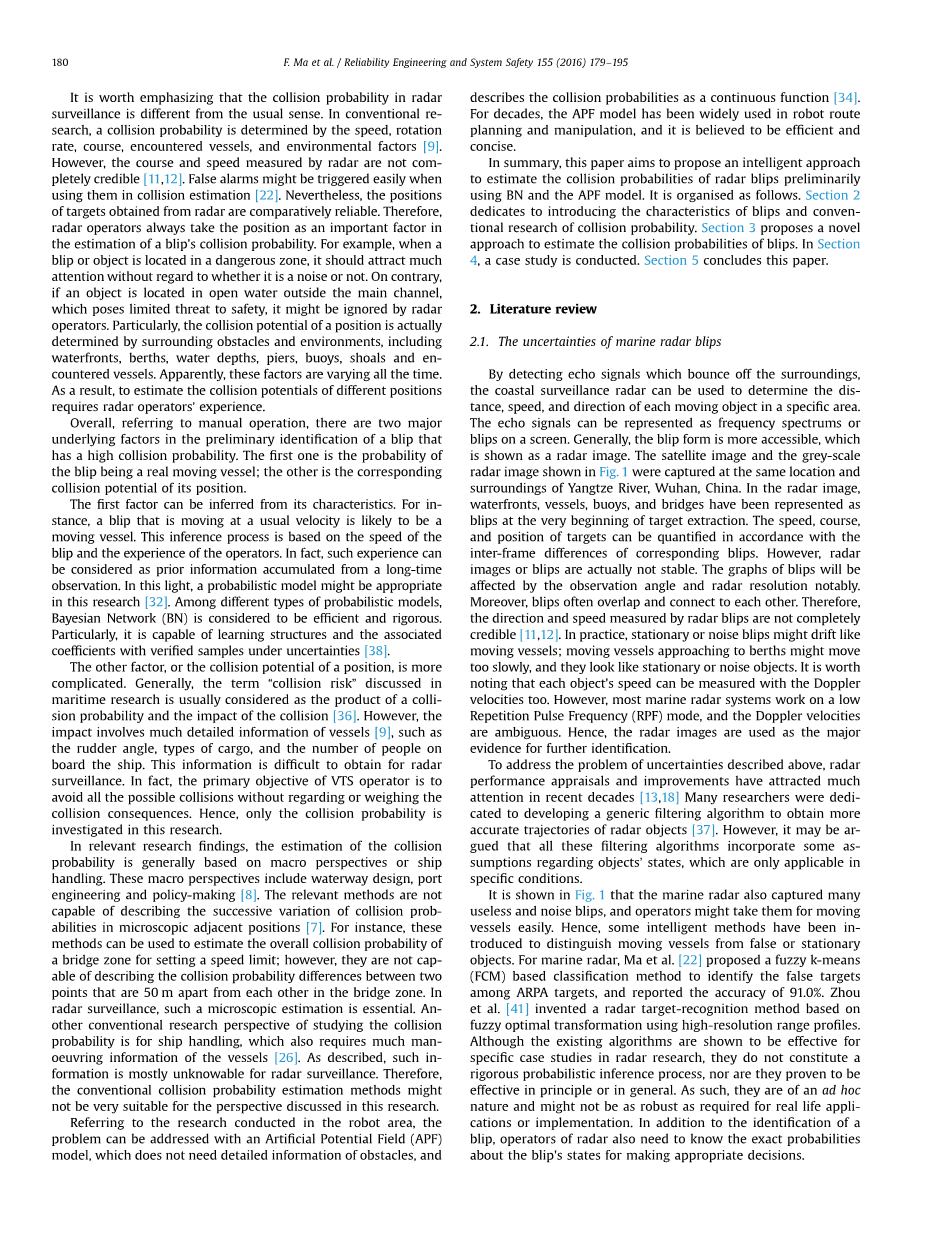
通过检测从周围环境反射回来的信号,海事雷达能够获知在某个特定区域内运动目标的距离、速度和方向。事实上,回波信号可用频谱或屏幕上的雷达光斑表示。一般来说,光斑的形式更容易理解。在这种形式下,雷达能够以如图1所示的灰度图或伪彩图来展示长江武汉航段的同一位置周围的环境。在目标提取的开始,雷达图像中的一系列光斑分别代表浅滩、船舶、浮标和桥梁。按照相应光斑的帧间差异,速度、航向和目标位置可以被量化。然而,这种雷达图像是不稳定的。雷达光斑会受到相对角度和雷达分辨率的显著影响。此外,雷达光斑经常会重叠、相互连接。因此,雷达测量的光斑的方向和速度比不完全可靠。在实践中,静止或噪声光斑可能会发生漂移,就像移动着的船舶一样。移动中的船舶在接近泊位时速度会很慢,从而看起来会很像静止或噪声光斑。值得注意的是每个目标的速度也可以利用多普勒速度进行测量。然而,大多数海事雷达系统是在较低的脉冲频率(RPF模式)上工作的,在这种情况下,多普勒速度是十分模糊的。因此,雷达图像作为主要依据进行进一步的识别。
Radar
Vessel
Vessel
Vessel
Bridge
Buoy
Buoy
Noise
Radar
Bridge
Bridge
Bridge
Buoy
图1武汉长江航道的雷达灰度图和卫星图像
为了解决上面描述的不确定性的问题,在最近十几年间雷达的绩效评估和改进吸引了高度关注。许多研究人员致力于研究一种通用的滤波算法提取雷达光斑的真实轨迹。然而,所有的滤波算法构成了一些关于目标状态的假设,然而这些假设只在某种特定的情况下是合理的。
如图1所示,海事雷达也捕捉到了大量没有用的目标和噪声光斑,并且操作员很容易将其误认为是运动的船舶。因此,为从虚假的和静止的目标中辨别出真实的船舶,引入了一些智能方法。对于海事雷达,Ma提出了一种分类方法识别海事监管雷达ARPA目标中的虚假目标,该方法利用模糊k-means准确率高达91.0%。Zhou使用高分辨率的轮廓范围,提出了一种基于模糊最佳转换的雷达目标识别方法。尽管现有的算法在雷达的研究中对特定案例研究证明是有效的,但它们不能构成一个严格的概率推理过程,他们也没有被证明是在原则上或在一般情况中是有效的。因此,它们是不符合逻辑的性质并且可能不会像现实生活所需的应用程序那样完美或得到实现。除了识别光斑之外,雷达的操作员还需要知道光斑状态的准确概率来做出适当的决定。
2.2船舶碰撞概率评估
除了光板的真实性,它在航道中的位置在评估相应的碰撞概率时是另一个重要因素。在图1中,桥梁或其他通道结构附近的光斑的碰撞概率明显高于其他地方。模拟这一现象,相邻位置不同的碰撞概率应进行适当的描述。
在实际中,很多因素对碰撞的概率都会造成影响,这些因素包括天气、海员、船舶自身条件、船舶交通流以及其它因素等。因此,碰撞概率可以从不同的角度进行模仿就像在第一节所描述的。Fujii等人提出的静态碰撞概率模型是一种广泛使用的模型。这种模型认为碰撞的概率是一个碰撞角的几何概率和事故起因概率的产物。显然,这种模型与船舶驾驶的关系非常密切。例如,Montewkaet等人在海事和航空经验的基础上,为几何概率提出了一种的新方法用于评估碰撞。Pedersen发表的一篇论文回顾了目前为降低船舶碰撞和搁浅造成的经济、环境和人员上的损失而进行的研究。
值得注意的是,研究人员越来越多的对利用AIS数据记录模拟船舶的特点感兴趣,因为这些记录被广泛认为是客观可靠的。因此,本文的研究也引入AIS作为推断的基本先验数据来源。
总的来说,碰撞概率的研究一般与多因素定量分析相关,多因素定量分析源于船舶领域或最小距离模型。然而,这信息不能被沿海雷达监测获得,只能通过甚高频(VHF)无线电得到。在日常管理中,甚高频无线电只在需要时进行验证;因此,光斑的位置似乎是唯一直接并可信的证据在评估相应的碰撞概率和可能性方面,这与航道的动态航行环境密切相关。泊位、码头、浮标和深度的任何改变都可能对碰撞概率的分布有显著的影响。尽管许多研究人员致力于基于这些因素提出单独模拟碰撞风险的方法,但是广泛承认和综合建模方法还没有被发明。
值得注意的是,这里的碰撞概率不是从频率分析获得的,一个随机过程的自碰撞事故可能不会经常发生。因此,研究评估碰撞概率通常是开始于事件因果关系的定性分析。在势场中通过雷达监测研究碰撞概率是不合逻辑的。势能理论可能适用于本研究。
2.3避障与APF模型建模
势能理论源于数理物理学。如今,势能理论也和概率、马尔科夫链的理论密切相关。在许多案例中,目标中存在排斥或吸引的现象(或力)。这类所谓的力很难量化,此外,距离是力衰减的核心因素。在这一刻,势能理论被认为是有吸引力的进行使用。
在航道中,碰撞的概率被认为是一中特殊的“斥力”,这种斥力客观地推开相关的船舶以避免碰撞事故。在航道中,碰撞的概率被认为是一类斥力,这种斥力客观地推开相关的船舶以避免碰撞事故。“排斥”的力量是完全符合碰撞可能性的。当有足够的碰撞事故记录时,碰撞的可能性可以被“斥力”量化。比如,众所周知,桥墩之间的航道越窄过往的船舶越危险。但是,船舶撞上桥墩的事故极少发生。那是因为,当船舶经过桥墩时,对船舶的驾驶员有非常严格的规定,这些规定包括速度的限制,不允许超越别的船舶等。这类规定客观地减少了事故。因此,碰撞概率或碰撞可能无法利用频率分析进行估计。然而,船舶碰撞的势能或概率是客客观存在的,这就迫使船舶改变自身的行动,尽可能远离码头。以碰撞概率比作“斥力”迫使这些船离开码头是不合逻辑的。在势能理论中,那些“斥力”是由码头存在相应的所谓“排斥势能领域”产生的。
上述讨论的现象由图2所示。这个图中显示在航道中有几个桥墩。数以百计的船舶正在通过桥墩,他们的轨迹用蓝色的圆圈和直线表示。在日常管理中,这些船舶轨迹的历史记录 可以从AIS数据库轻松获得。特别是,这些轨迹表明船舶的意愿路线是远离这些桥墩来降低碰撞潜力。另一方面这种现象可以被视为是这些船舶被一些无法察觉“斥力”推到一个狭窄的通道。如图2所示,这些“斥力”表示为红色箭头。显然,靠近桥墩时,排斥力会更大;距离是斥力衰减的的核心因素。如前所述,“斥力”的强度与相应的碰撞概率是一致的。通过分析通过的船舶的分布,相应的斥力或排斥势能可以被量化。因此,某一位置的碰撞概率可以间接得到。
Bridge pier
Bridge pier
Traffic flow
Repulsion
图2 桥墩之间的交通流
用“力”描述船舶碰撞概率是由Statheros等人首先提出的。他们在无人水面船舶的避碰(USV)研究中使用一个虚拟的场力(VFF)来描述碰撞概率。事实上,用碰撞势场描述障碍物的观点在机器人的研究中是很常见的,这种碰撞势场被称作人工势场(APF)。APF模型是由Khatib首先提出,并将其用于操纵器和移
全文共5984字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12934],资料为PDF文档或Word文档,PDF文档可免费转换为Word

