
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
针对于一种新型发动机冷却系统的二阶滑模控制
Saif Siddique Butt, Robert Prabel and Harald Aschemann
——德国罗斯托大学机电一体化系主任
摘要:本文提出了一种基于车辆发动机冷却系统的简化控制导向模型的鲁棒非线性控制方法。电驱动散热器风扇被视为控制输入。基于系统描述,一种二阶滑模控制被提出用来追踪发动机出口温度的期望轨迹。二阶滑模控制提供了平稳的控制行为,并通过引入滑动算法的一阶时间导数来减少抖振现象。采用增益调整的Utkin滑动模式观测器,因为使用输出误差反馈和开关项,用来估计系统内的未知热流。估算的热流用于控制设计中,以补偿作用于系统的干扰。实验分析强调了二阶滑模控制与基于滑动模式的观察器设计相结合的有效性。
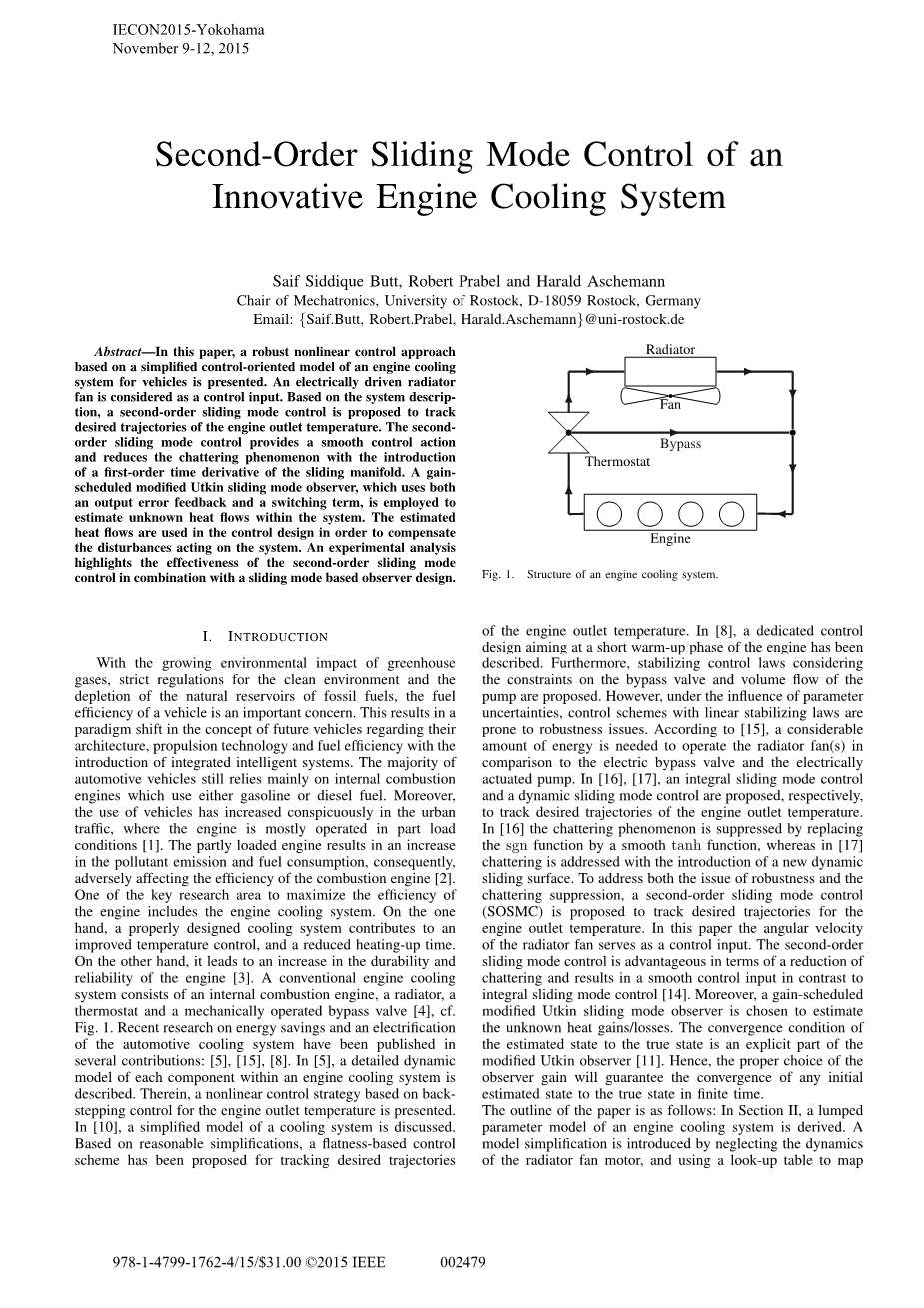
图1 柴油机冷却系统结构
I.介绍
随着温室气体对环境不断产生的影响,对清洁环境的严格规定以及化石燃料天然储存库的枯竭,车辆的燃油效率成为一个重要问题。随着集成智能系统的引入,这导致了未来汽车的结构,推进技术和燃油效率方面的模式转变。大多数汽车仍主要依靠使用汽油或柴油燃料的内燃机。此外,在城市交通中,车辆的使用显着增加,其中发动机主要在部分负载条件下运行[1]。部分负载的发动机导致污染物排放和燃料消耗的增加,从而对内燃机的效率产生不利影响[2]。发动机冷却系统是最大限度地提高发动机效率的关键研究领域之一。一方面,设计合理的冷却系统有助于改善温度控制,并缩短加热时间。另一方面,它可以提高发动机的耐用性和可靠性[3]。传统的发动机冷却系统由内燃机,散热器,恒温器和机械操作的旁通阀[4]组成,参见图1。最近在节能和汽车冷却系统的电气化方面的研究已经发表在几个文献中:[5],[15],[8]。在文章[5]中,描述了发动机冷却系统内每个部件的详细动态模型。文章中,提出了一种基于后置控制的发动机出口温度的非线性控制策略。在文章[10]中,讨论了冷却系统的简化模型。根据合理的简化,已经提出基于平坦度的控制方案来跟踪发动机出口温度的期望轨迹。在文章[8]中,已经描述了针对发动机的短暂预热阶段的专用控制设计。此外,考虑到旁通阀的限制和泵的体积流量的稳定控制法则被提出。然而,在参数不确定的情况下,具有线性稳定规律的控制方案容易出现鲁棒性问题。根据文章[15],与电动旁路阀和电动泵相比,需要相当大的能量来操作散热器风扇。在[16],[17]中,分别提出了积分滑动模式控制和动态滑动模式控制,以追踪发动机出口温度的期望轨迹。在[16]中,通过用平滑tanh函数代替sgn函数来抑制抖振现象,而在[17]中,通过引入新的动态滑动表面来解决抖振现象。为了解决鲁棒性和颤振抑制的问题,提出了二阶滑模控制(SOSMC)来跟踪发动机出口温度的期望轨迹。在本文中,散热器风扇的角速度用作控制输入。与积分滑模控制[14]相比,二阶滑模控制在减少颤振方面具有优势,并且可产生平滑的控制输入。更重要的是,选择预期增益修正的Utkin滑动模式观测器来估计未知热量收益/损失。预期状态与真实状态的收敛条件是修正的Utkin观测器的一个明确部分[11]。因此,观察增益的适当选择将保证任何初始预期状态在有限时间内收敛到真实状态。
本文概要如下:在第二节中,将导出一个发动机冷却系统的集总参数模型。 在忽视散热器电机的动力部分的情况下,可以引出一个简化模型,再通过查表可以得到施加电压和风扇速度的静态数据。第三部分介绍了控制设计。此外,第四部分描述了一个用于未知热量流量的增益调度修正Utkin观测器。第五部分介绍了一个原型试验台。第六部分提供了实验结果,并描述了基于二阶滑模控制的均方根误差(RMSE)的性能评估。最后,第七节讨论结论和未来的工作。
II.柴油机冷却系统非线性导向模型
创新的发动机冷却系统的闭环回路如图2所示。该回路对应于预热阶段完成后通过保持旁路阀完全关闭而运行的冷却系统。因此,冷却剂仅流过散热器路径。 忽略连接管道的损耗,参见图2,带有体积的发动机的入口和出口温度分别由和表示。应用热力学的第一定律,发动机的能量平衡产量:
其中和表示冷却剂流体的比热容和密度,而q是由电动泵提供的体积流量。此外,表示从发动机进入冷却剂回路的热流。
图2 创新的发动机冷却系统的结构
由于连接管道的热量损失可以忽略不计,散热器入口处的温度假定等于。散热器风扇单元以角速度omega;运行来冷却流过散热器的热的冷却剂。体积散热器的能量平衡可以表示为
在此,热流量可以分解为一个被动分量和一个有效分量,见[10]。 在数学上,热流量由下式给出
主动冷却部件与风扇的角速度omega;成正比,即,
其中r表示风扇半径,换热器效率,换热系数,表面积。介绍,公式(2)中的主动热流分量可以写成
系统参数gamma;是基于最小二乘法实验确定的。值得一提的是,干扰项和不仅包含不可测量的热损失,而且还包含模型结果造成的模型误差简化。由(1) -(2)给出的非线性控制导向模型可概括如下
相应地,测量的输出矢量变成
在下面的部分中,将描述基于二阶积分滑动模式控制的发动机出口温度的轨迹跟踪控制。
III.二阶滑模变控制
滑动模式控制器的目标是驱动状态轨迹朝向状态空间中的滑动表面并在之后维持该表面上的状态轨迹,参见文章[11],[12]。当且仅当滑动流形满足以下条件时,滑动模变才被认为是二阶的
二阶滑动模式是有利的,因为抖动现象可以通过整合由二滑动控制器产生的不连续控制来避免。设e表示测得的发动机出口温度与期望的发动机出口温度之间的误差(用下标d表示)
准确跟踪发动机出口温度的期望轨迹可以通过下列选择多种滑动来实现,参见[14]
与Hurwitz多项式的严格正系数,和。这里引入积分动作来避免稳态误差。滑动流形的时间导数给定为
当系统到达滑动流形时,即,因此跟踪误差e将按指数规律收敛到零。对于这种情况,错误动态受以下关系支配
引入控制律的形式
与线性部分
以及一个开关部分
额外的开关控制部分使状态回到滑动表面-达到阶段-并且尽管受到干扰和不确定性的影响,仍将其保持在滑动表面上。将(12),(13)和(14)代入(10)导致滑动流形的二阶导数为
为了证明系统滑动面的渐近稳定性和有限时间收敛性,考虑形式的二次Lyapunov V(x)函数
对于渐近稳定,Lyapunov函数的时间导数必须是负的。然而,为了实现有限时间收敛,李亚普诺夫函数的时间导数必须满足以下可达性条件[14]
因此,参数lambda;1和lambda;2的严格正值保证了李雅普诺夫函数的时间导数变为负定。因此,控制omega;将在有限时间内将滑动表面驱动为零,并且此后将其保持为零。值得一提的是,动态控制输入(12)中的热流量的一阶时间导数是在[13]中提出的鲁棒滑动模式微分器的帮助下实现的。
IV. 增益调度改进的UTKIN观测器设计
方程(12)表明,考虑到控制方案中的未知热流,可以显着提高存在模型不确定性情况下的跟踪精度和干扰行为。 因此,本节提出了一个滑动模式观测器,扩展了一个额外的Luenberger型增益矩阵来反馈输出误差,以提供一个稳健的状态和扰动结构,参见参考文献[11]。为了估计未知干扰-除了状态变量-根据积分器干扰模型引入
因此,(6)中的状态空间表示被扩展如下:
与测量方程
这里,表示恒定的输入矢量,输出矩阵用表示。现在考虑一个可能的坐标变换使用
其中跨越的零空间。使用新坐标变换的准线性系统由下式给出
相应的输出分配是
现在,新条件下的系统可以被写成:
系统可以写为
对于这个给定的系统,滑动模式观察者具有这种形式
其中和表示状态估计值。G1和G2表示Luenberger型增益矩阵,是反馈增益矩阵。不连续向量upsilon;定义为
严格正增益M1和M2。 通过定义和,可以得到(24)和(25)的估计误差动态为
引入一个新的误差变量,所得到的关于新状态变量和的误差动态可以表示为
子矩阵由下式给出
在upsilon;= 0的情况下,误差动态系统(28)的渐近稳定性可以通过设计增益矩阵L根据
其中表示具有特征多项式的设计稳定矩阵
选择一个对角矩阵L并求解(29)得到结果
类似地,增益矩阵G2可以如下设计
这里,是具有位于复数左半平面中的特征值的设计矩阵,
和
最后,G1可以被设计为使得。尽管开关输入upsilon;产生对某些类别的模型不确定性提供鲁棒性的潜力,但是使用tanh函数而不是sign函数来抑制抖动现象。
V.控制结构的实现
图3显示了二阶滑模控制器与基于滑动模式的观测器和鲁棒微分器的实现方案。
图3 控制实施
温度的期望轨迹以及其时间导数被提供给二阶滑动模式控制器。使用鲁棒滑模微分器来估计热流量的时间导数。
在早期的工作中,机电一体化课程开发的原型试验台,参见[10],适用于实现图4所示的发动机冷却系统。在该试验台中,两个热源-电阻热箔代表内部内燃机。此外,伺服控制旁通阀,散热器和泵符合方框图(参考图1)。对于温度测量,使用PT-100传感器。此外,流量传感器用于测量通过散热器路径的体积流量。
仿真中对整体控制结构和滑模观测器的闭环稳定性进行了深入的研究。
图4 机电一体化的原型试验台
VI.实验结果
使用实验数据,使用最小二乘技术来识别系统参数,和gamma;。滑模观测器的特征值被恰当地选择以实现具有合理快速误差收敛的平滑预估。泵提供的体积流量设置为标称值。考虑两种情况以验证二阶滑动模式控制(SOSMC)以及增益预定修改的Utkin观察者的有效性。
- 情况1:驱动模型
在第一种情况下,考虑在发动机提供恒定加热功率的情况下,在行驶阶段期间车辆的正常运行。图5显示了的理想和测量温度曲线以及使用SOSMC的跟踪误差。对于SOSMC来说,优异的跟踪行为是由瞬态误差的绝对量保持在plusmn;0.2 K内的事实引起的。另一方面,在稳态阶段得到了完美的轨迹跟踪行为。
图5 情况I:发动机出口温度和散热器出口温度的所需和测量值以及跟踪误差
此外,在SOSMC的情况下,可以获得平稳的控制行动(参见图6)。在此可以清楚地看到,随着期望的发动机出口温度的增加,散热器风扇的角速度降低。 这反过来又将散热率降低到周围的环境中。
图6 情况I:测量散热器风扇单元的角速度。
在图7中描绘了通过增益预定滑动模式观测器估计的热流量。这里,的正值表示热量传递到冷却系统; 另一方面,的正值表示周围环境的被动热损失。
图7 情况I:估计未知热流量。
B.案例二:启动-停止操作
在这种情况下,第二加热器部分地开启和关闭以实现车辆的频繁起止操作或部分负载情况。在实验期间,通过在时间t = 500s接通第二加热器提供过热,并且在tge;800s之后考虑正常驱动模式,即仅第一加热器将热能输送到冷却系统中。
图8 情况二:发动机出口温度和散热器出口温度的期望值和测量值。
在这里,SOSMC跟踪期望的轨迹(参见图8),并且在SOSMC的起动停止操作期间的最大绝对误差的大小被限制在0.3K以内。当发动机达到正常驾驶模式tge;800s时,稳态误差收敛到零(参见图9)。
图9 情况二:发动机出口温度的跟踪误差。
由于过量的热量被添加到系统中,因此需要通过散热器风扇来增加散热率以追踪期望的发动机出口温度。因此,图10所示的SOSMC对应的角速度符合频繁的起止操作。此外,使用所提出的控制策略获得平滑的控制动作。
图10 情况二:散热器风扇的角速度
图11 情况二:估计未知热流量。
这种情况下,通过增益预定修正滑动模式观测器估计的热流量如图11所示。这里可以清楚地看到,估计的热流量因应用第二个加热器而增加。尽快随着第二加热器的影响被移除,观察者估计正常驾驶模式期间的热流量。均方根误差(RMSE)的小幅度与测量矢量N的长度给出
在表I中强调了在正常驾驶模式和起步停止模式下非线性鲁棒控制策略的有效性。
VII.结论和未来展望
在本文中,导出了一种车辆中的发动机冷却系统的非线性控制导向模型。为了控制目的,散热器风扇的角速度被认为是控制
全文共5703字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12272],资料为PDF文档或Word文档,PDF文档可免费转换为Word

