通过逼近I–V曲线在局部阴影条件下光伏发电系统最大功率点跟踪方法
摘要——局部阴影(PS)的光伏(PV)阵列在p-v特性有多个峰. 通过传统的最大功率点跟踪(MPPT)算法—在光伏阵列均匀光照条件下(UICs)成功证明。他们的跟踪速度较低,可能无法跟踪全局最大功率点(GMPP)PS阵列。针对ps阵列提出了几种MPPT算法。他们中的大多数需要大量采样降低速度和增加能量损失控制。本文的方法得到的全局最大功率点是确切并且迅速的。它智能地从数组的P - V曲线中抽取一些样本,并将搜索电压范围划分为小的分区。然后,它用一个简单的曲线近似每个分区的I - V曲线,并据此估计该次区域中阵列功率的上限。其次,通过实测功率值与估计的上限相比,得到全局最大功率点的搜索区域,并根据一些明确的判据确定全局最大功率点的范围。仿真和试验的结果与比较呈现出了性能的突出和方法的优越性。
索引——电流电压(I–V)特性、最大功率点跟踪(MPPT),部分(PS)条件下,光伏(PV)系统。
一.引言
光伏发电系统因其长期的优势而在许多国家商业化。光伏阵列是光伏发电系统的基本元件,其电压和电流之间存在非线性关系,只有在一个工作电压下才能产生最大功率,即最大功率点(MPP)。MPP将随着环境条件的变化而变化。因此,找到这个最佳点在所有环境条件下光伏发电系统中提取的最大功率是光伏应用的主要问题之一。
均匀辐照条件下,光伏阵列(UIC),只有一个峰值(MPP)在P–V曲线,和传统的最大功率点跟踪(MPPT)技术,如同登山,扰乱和观察(Pamp;O)和增量电导可以有效的跟踪它 [ 1 ]。虽然这些方法在实现上相当简单,但在部分遮蔽条件下(PSC)的数组可能会失败。在部分遮蔽条件下,一个阵列的光伏组件没有得到均匀的太阳辐照度并且数组P–V特性可能包含多个峰具有不同的功率值。在大多数情况下,部分遮蔽条件是不可避免的,尤其在其安装于城市或者有缓慢移动的云彩的地区是很常见的[ 2 ]。因此,从研究的角度来看,部分遮蔽条件的分析和缓解部分遮蔽条件的影响是有趣的。[ 3 ]于是,目前已经提出许多在部分遮蔽条件下的PV系统的MPPT方法 [ 3 ] [ 23 ]。一般来说,跟踪方法被分为两个整体组。第一组包括基于硬件的方法,如使用不同的阵列侦察配置,额外的测量–[ 4 ] [ 6 ],或不同的变换器拓扑–[ 9 ] [ 7 ]。另一方面,第二组是基于搜索算法,通过对现有的商业电源转换器的控制软件进行修改而实现的,与基于硬件的方法相比,其成本和复杂性更低。
在[6]中提出的方法可以很好的检测到PS的出现。并通过测量所有光伏组件的电压来预测所有MPP的位置。它还能正确地找到全局MPP (GMPP)并具有良好的性能,但是它需要大量的传感器来满足控制目标。在[9]中提出的MPPT方法采用了可控制的电流互感器,与光伏组件并联,调节模块电流,跟踪GMPP。该方法降低了PS对阵列功率的影响,具有较好的精度,但其实现复杂且昂贵。
已有文献对MPPT问题进行了优化,使用了多种智能和启发式算法, 如闪烁的萤火虫[10],人工蜂群[11],模糊控制[12],混沌搜索[13],模拟退火[14],灰狼优化技术[15],粒子群优化[16]在PSCs中找到GMPP。。然而,这些方法在系统动态(动态性能不佳)、实现复杂性以及在P-V特性不同点的大量采样和低MPPT速度等方面都有较大的波动。在某些情况下,它们的成功取决于应该明智地选择的起始值,以保证收敛[14], [17]。
该方法[18]样本中p - V曲线V = 0.8 Vocminus;mod间隔。在与dP/dvlt; 0的样本附近,有一个峰值,由Pamp;O技术跟踪。最后,通过比较所有的跟踪峰,确定了GMPP。该方法在[19]假设p - v曲线的峰值位于0.8Vocminus;mod的倍数未必是真正的[3]。[20]中提出的方法,使用电压阶跃VGSTEP = 0.5 vocminus;mod扫描GMPPT从p - v曲线最小电压对最大电压虽然有些步骤被忽略并且搜索区域是有限的。该方法具有良好的速度和性能,但在某些情况下,在扫描VGSTEP时可能找不到GMPP,在[19]中观察到的缺陷,通过在每个样本中调用Pamp;O来解决[18]。在[ 4 ]中,引入了另外两种方法。所提出的基于搜索的方法跳过基于阵列的测量电流和最高采样功率的搜索电压范围。该方法具有较高的精度,但必须通过小步骤扫描P-V曲线的很大部分,大大降低了跟踪速度。
加塞米等。[21]提出了用坡度函数扫描光伏阵列而不是常规的步进式变化的方法。由于阵列电压的瞬时值可以忽略不计,消除了采样间隔,这种方法获得了期望的速度和更好的动态性能。该方法在[22]样本中,从0.8 Vocminus;mod的阵列电压的整数倍,决定了在每个样本附近的阵列功率的上限。然后,它在样本附近搜索它们的上界功率大于可能的MPP的最高采样功率。该方法在[23]样本中,来自于Vocminus;mod的阵列电流的倍数。然后,通过比较测量的电流与彼此的距离,确定了电流电压(I-V)曲线上的步长、长度和顺序。当I-V曲线上有一个步骤变化时,它调用hill爬升算法来跟踪这些mpp。最后,通过比较跟踪MPPs的价值,确定了GMPP的价值。一般来说,一个好的MPPT算法在所有条件下都应该跟踪GMPP,并迅速找到它以保证高效。它还应该有一个简单的并且计算负担较低的实现。本文提出了一种在所有辐照条件下寻找GMPPT的新算法。该方法从I-V曲线上取一些样本,将电压搜索区域划分为小的子区域,并估计该分区域的阵列功率上限。然后,通过比较最高的采样功率和估计的上限,搜索区域是有限的。通过继续这个过程,GMPP的邻近区域被确定。最后,通过Pamp;O算法来跟踪准确的GMPP。
本文的其余部分组织如下:第2节讨论PSC下光伏阵列的总体特征。第三节介绍了丙泊酚的结构。在第四节中介绍了该方法的详细描述,并在第六节中介绍了在MPPT中使用的dc/dc转换器的控制,并与文献中四种最常用的方法进行了比较。实验结果和比较结果见第七节。最后,本文的结论在第VIII节中得到了报道。
二.PSC下光伏阵列的特性。
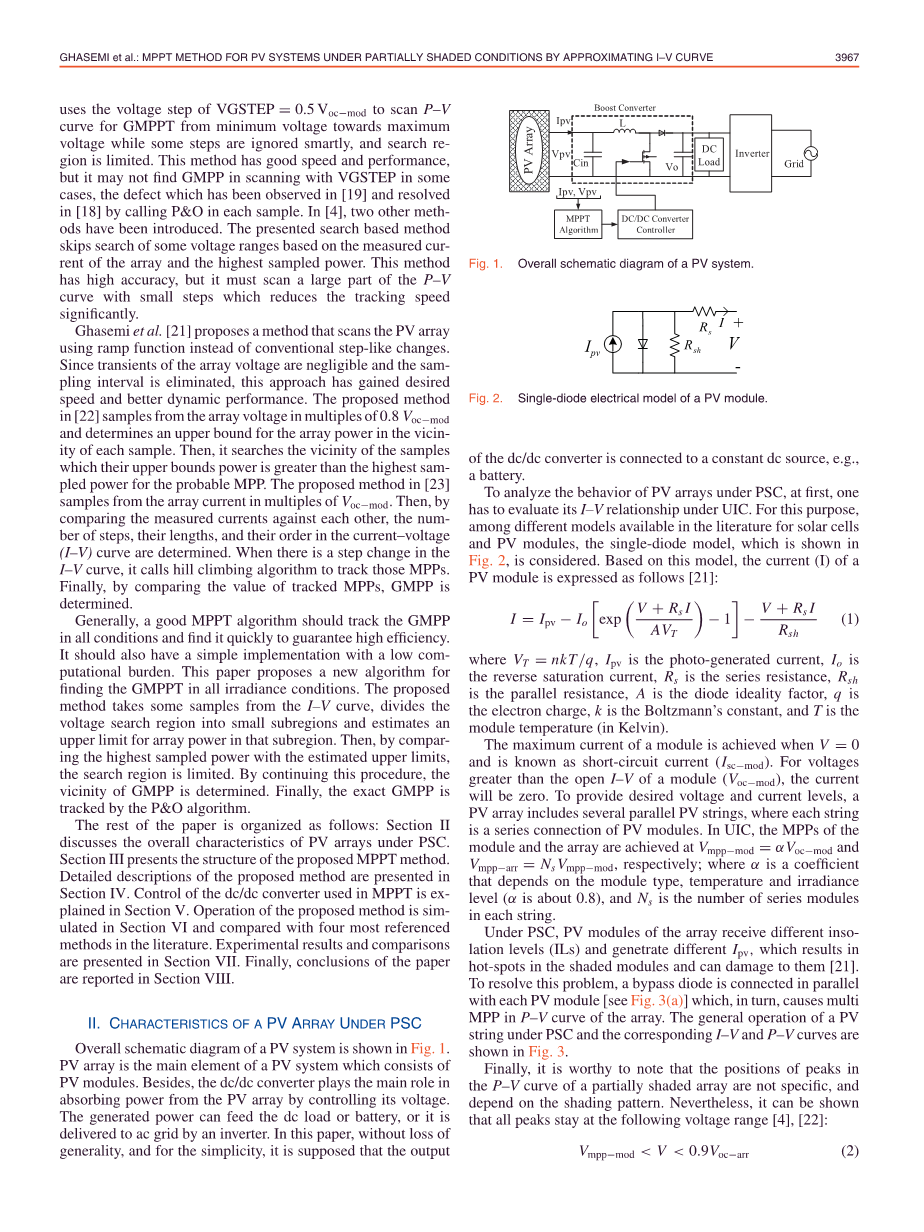
光伏系统总体示意图如图1所示。光伏阵列是光伏系统的主要组成部分,由光伏组件构成。此外,dc/dc变换器通过控制光伏阵列的电压,起到了吸收光伏阵列电源的主要作用。所产生的电源可以给直流负载或电池供电,也可以由逆变器送至交流电网。在本文中,没有通用性的损失,为了简单起见,假定dc/dc转换器的输出连接到一个恒定的直流电源,例如电池。
图1.光伏系统的总体示意图。
图2.光伏组件的单二极管电气模型。
为了分析PSC下光伏阵列的行为,首先需要对其在UIC下的I-V关系进行评估。为此目的,在研究太阳能电池和光伏组件文献的不同模型中,考虑了单二极管模型,如图2所示。基于此模型,PV模块的电流(I)表示如下[21]:
其中VT = nkT/q, Ipv为光产生电流,Io为反向饱和电流,Rs为串联电阻,Rsh为并联电阻,A为二极管理想因子,q为电子电荷,k为玻尔兹曼常数,T为模温(开尔文)。
模块的最大电流达到V = 0时,称为短路电流(Iscminus;mod)。开放的电流-电压的电压大于一个模块(Vocminus;mod),当前将是零。为了提供所需的电压和电流水平,PV阵列包括几个并行的PV字符串,其中每个字符串都是PV模块的串联连接。在UIC,模块的mmp和数组实现Vmppminus;mod =alpha;Vocminus;国防部和Vmppminus;arr = Ns Vmppminus;mod,分别;其中alpha;是一个系数取决于在每个字符串,模块类型,温度和辐照度水平(alpha;约为0.8)和在每个字符串Ns系列模块的数量。
在PSC下,阵列的光伏组件接收不同的日晒水平(ILs),并产生不同的Ipv,从而导致阴影模块中的热点,并对其造成伤害[21]。为了解决这个问题,一个旁路二极管与每一个PV模块并联[见图3(a)],这反过来又会导致阵列的P-V曲线上的多MPP。在PSC下的PV串的一般操作以及相应的I-V和P-V曲线如图3所示。
最后,值得注意的是,部分阴影阵列的P-V曲线上的峰值位置并不是特定的,并且依赖于阴影模式。然而,可以证明所有的峰值都停留在以下电压范围[4], [22]:。
图3;所示。(a) PSC下试样PV线的操作。(b) (c) I-V和P-V曲线的结果。
图4所示。(a) I-V曲线和(b) P-V曲线在每个分区域的简单和修正近似。
虽然[19]声称p - v曲线的峰值部分阴影位于数组的整数倍Vmppminus;mod,[3]下降这一假设。此外,[18]声称最低电压差之间的间隔Vmppminus;mod,但进一步的调查由[20]表明, 这个值从0.5 Vmppminus;mod一直在广泛变化,但它在大多数情况下位于Vmppminus;mod。
三.所提出方法的构成
本文提出的GMPPT方法是基于将电压范围(2)划分为一些小的子区域,并以简单的曲线近似于每个子区域的I-V曲线。为了阐明这一观点,PS光伏阵列的子区域k如图4所示,在两个样本k和k 1之间([Vk Vk 1])。如图所示,该阵列的I-V特性可以用一个简单的恒流曲线来近似,即:在整个范围内,i = Ik的值大于实数。利用这个近似,近似曲线的相应功率将大于实际曲线。然后,可以通过下式估算出子区域k中阵列最大功率的上限。
该方法的基本描述,假设电压范围(2)已经被分为n / nminus;1个样本阵({(V1,I1,P1),hellip;(Vn,Pn)})。然后,使用(3)作为Pup-k s(k = 1,2,... n-1)估计所有子区域的功率上限。 之后,将所有采样(测量)功率的最大值,即称为Pmax-s的最大值(P1,P2,...,Pn)与所有Pup-k进行比较。 当然,在Pup-k低于Pmax-s的次区域,GMPP不在该次区域,它可以从搜索区域中消除。 换句话说,搜索区域仅限于Pup-k大于Pmax-s的分区域。此后,这些分区域被称为坦率子区域。 通过类似的程序和进一步的智能采样,搜索区域逐渐变小,直到GMPP附近达到。
基于所给出的解释,本文提出的方法的结构建立在智能采样,I-V曲线逼近和搜索终止准则三个主要部分上。 因此,下面提出基于I-V曲线的修正近似值和搜索结束标准的Pup-k计算,下一节将介绍智能采样程序。
- PV阵列#39;I-V曲线的修正近似
用恒定电流曲线近似I-V曲线太保守。 这意味着在子区域k中产生的Pup-k远大于真实的可能峰值功率。 这可以增加获取GMPP的搜索时间。 因此,在下文中,提出了对实际I-V曲线的修改近似,其在图4中描绘,并与恒定电流曲线近似进行比较。 很明显,由于新的近似曲线在恒定电流曲线下,因此它产生较小的Pup-k。
子区域k中的新近似曲线是两条曲线的总和。 第一条曲线是Ik 1值的恒定电流曲线。 第二个功能是具有特定Voc的典型模块(IT-M(V))的I-V曲线,称为Voc-T-M和一个特定的Isc,称为Isc-T-M,类似于 因此,近似曲线的电流如下:
实线和近似曲线的起点和终点一起相等,即(Vk,Ik)和(Vk 1,Ik 1)。 近似曲线的最大功率必须大于相关子区域中阵列的最大功率(实际曲线)。 它可以证明,选择Voc-T-M和Isc-T-M作为(5)将满足必要条件
因此,近似曲线(Pup-k)的最大功率可以是子区域k中阵列功率的上限。 Pup-k的确定在下面解释。
首先,假设在图4中,Vk = 0和Ik 1 = 0。在这种情况下,近似的I-V曲线的最大功率将在V = Vmpp-T-M,并且它等于 Vmpp-T-M Impp-T-M,其中Vmpp-T-M和Impp-T-M是MPP上典型模块的电流和电压[在(5)中指定的]。 通过考虑Vk和Ik 1的非零值,MPP将处于V = Vmpp-T-M Vk或V lt;Vmpp-T-M Vk或Vgt; Vmpp-T-M Vk。
在该子区域[Vk Vk 1]中,近似曲线的功率被推导如下:
其中IT-M和VT-M是典型模块的电流和电压。很明显
然后,如果MPP处于V = Vmpp-T-M Vk,那么可以推导出这一点
如果MPP处于(Vgt; Vmpp-T-M Vk,I lt;Impp-T-M Ik 1),则该子区域中的(Vk IT-M)的最大值将是Vk Impp-T-M ,并且max(VT-M Ik 1)等于(Vk 1-Vk)Ik 1。 因此
如果MPP处于(V lt;Vmpp-T-M Vk,Igt; Impp-T-M Ik 1),那么在该子区域中的(Vk IT-M)的最大值应该是Vk(Ik-Ik 1) (VT-M Ik 1)等于Vmpp-T-M Ik 1。 因此
最后,通过选择Pup-k = max(Papp)并考虑(8) - (10),可以得到
其中,(11)的右边项可以被认为是相关分区域中的Pup-k。
从(11)可以看出,Pup-k的值随着Vmpp-T-M和Impp-T-M的增加而增加。 商业模块的Vmpp-mod和Impp-mod总是分别小于0.85 Voc-mod和0.95 Isc-mod。 因此,在所有类型的阵列和模块中,Vmpp-T-M = 0.85Voc-T-M和Impp-T-M = 0.95 Isc-T-M用于(11)中。 因此,使用所提及的Vmpp-T-M和Impp-T-M对(11)的新估计用于估计Pup-k而不是(3)。
- 检索结束
根据所提出方法的基本解释,进一步从阵列中取样,可以使子区域和搜索区域逐渐变小。现在,假设经过一些采样,电压范围[VL VU]是所有坦率的子区域(先前定义的)所在的最小电压范围。另一方面,已经证明MPP之间的最小电压间隔是0.5 Vo
全文共13349字,剩余内容已隐藏,支付完成后下载完整资料

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10460],资料为PDF文档或Word文档,PDF文档可免费转换为Word

