
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
容积卡尔曼滤波器
抽象:
在本文中,我们提出了一种用于高维状态估计的新型非线性滤波器,我们将其称为容积卡尔曼滤波器(CKF)。CKF的核心是球面 - 径向立体规则,这使得可以在数值上计算非线性贝叶斯过滤器中遇到的多元矩积分。具体而言,我们推导出三阶球面 - 径向立方体规则,该规则提供了一组与矩阵尺度线性缩放的立方体点。因此,CKF可能为高维非线性滤波问题提供了一个系统的解决方案。该论文还包括改进CKF的平方根版本以提高数值稳定性。CKF在两个非线性状态估计问题中进行了实验测试。在第一个问题中,所提出的容积规则被用来计算非线性变换的高斯随机变量的二阶统计量。第二个问题涉及使用CKF追踪机动飞机。两个实验的结果都证明了CKF优于常规非线性滤波器的性能。
第一节
介绍
在本文中,我们考虑具有加性噪声的非线性动态系统的滤波问题,其状态空间模型由离散时间差分方程对定义[1]
过程方程: (1)
测量方程: (2)
是离散时间动态系统的状态 k;和是一些已知的功能;是已知的控制输入,其可以从如图1中的补偿器导出; 是测量; {} 和 {} 是具有零平均值和协方差的独立过程和测量高斯噪声序列和。
在贝叶斯过滤范例中,状态的后验密度提供了当时状态的完整统计描述。在时间收到新的测量k,我们更新时间的状态的旧后密度 (kminus;1) 在两个基本步骤中:
时间更新,涉及计算预测密度
(3)
表示输入测量的历史随时间变化 (k - 1 ); 是在时间(k - 1 )的旧的后密度 和从(1)中获得的状态转换密度。
测量更新,涉及计算当前状态的后验密度
使用状态空间模型(1),(2)和贝叶斯规则
(4)
为了在(4)中发展预测密度与后验密度之间的递归关系,输入必须满足关系式
这也被称为控制的自然条件[2].
因此这种情况表明有足够的信息来生成输入。具体,使用 可以生成输入值 。在这种情况下,我们可以写成
(5)
之后,将(5)代入(4)
(6)
正如预期的
(7)
并且这个测量似然函数是从(2)中获得的。
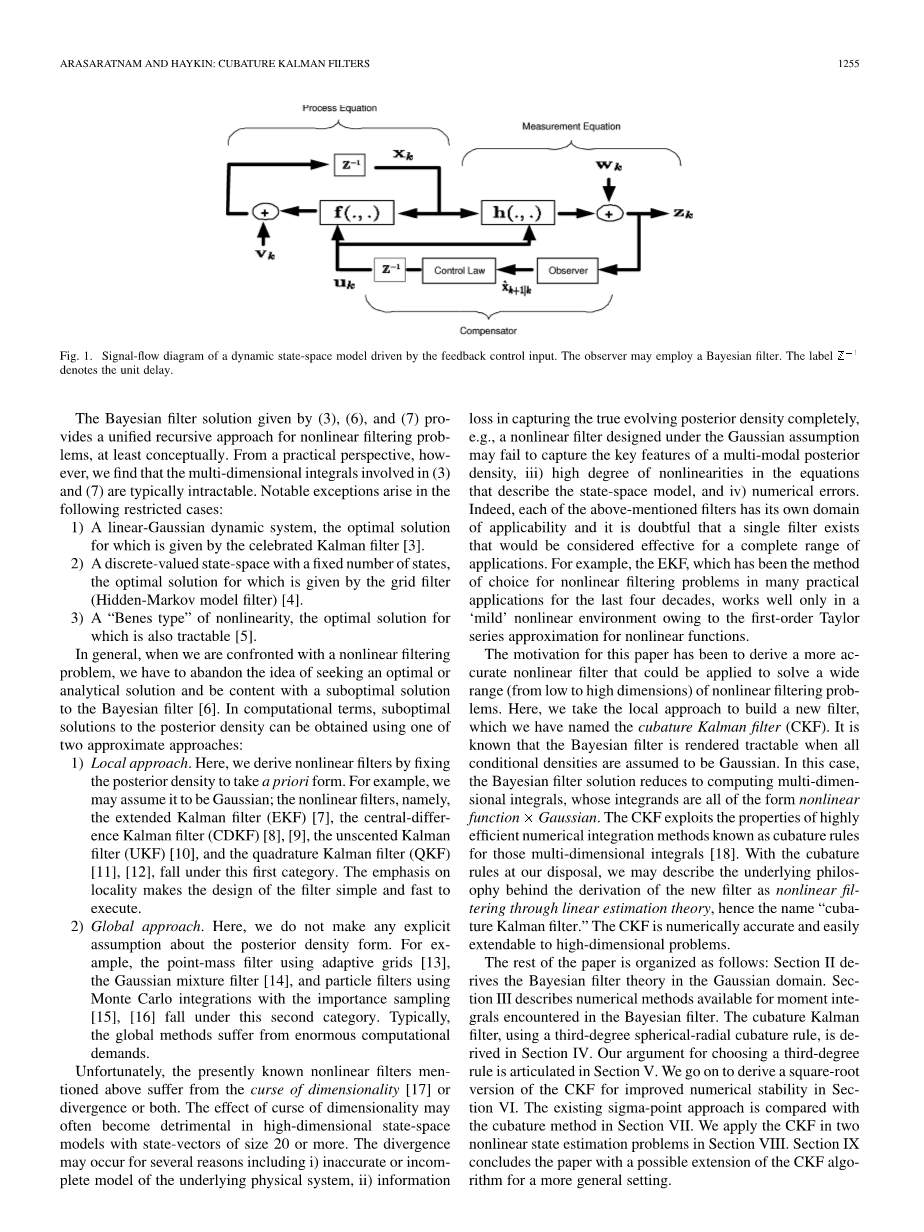
图1 由反馈控制输入驱动的动态空间模型的信号流图。观察者可以使用贝叶斯过滤器。标签表示单位延迟。
至少在概念上,由(3),(6)和(7)给出的贝叶斯过滤器解决方案为非线性过滤问题提供了统一的递归方法。然而,从实践的角度来看,我们发现(3)和(7)中涉及的多维积分通常是难以处理的。在以下受限情况下会出现明显的例外情况:
- 一个线性高斯动态系统,其最优解由著名的卡尔曼滤波器给出[3]。
2)一个具有固定数量状态的离散值状态空间,其最优解由网格过滤器(Hidden-Markov模型过滤器)给出[4]。
3)一种非线性的“Benes型”,其最优解也是易于处理的[5]。
一般来说,当我们遇到非线性滤波问题时,我们不得不放弃寻求最优或分析解的想法,并来满足贝叶斯滤波器的次优解[6]。在计算方面,后检验密度的次优解可以用两种近似方法的其中一种来解决:
1) 局部方法。在这里,我们通过固定后验密度来获取非线性滤波器以采取先验形式。例如,我们可以假设它是高斯的; 非线性滤波器,即扩展卡尔曼滤波器(EKF)[7],中心差分卡尔曼滤波器(CDKF)[8],[9],无迹卡尔曼滤波器(UKF)[10]和正交卡尔曼滤波器(QKF)[11],[12]属于第一类。对本地化的重视使得过滤器的设计简单且快速执行。
2) 全局方法。在这里,我们没有对后验密度形式做任何明确的假设。例如,使用自适应网格[13]的点质量滤波器,高斯混合滤波器[14]以及使用蒙特卡洛积分与重要性采样[15],[16]的粒子滤波器属于第二类。通常,全局方法需要巨大的计算量。
不幸的是,目前已知的上述非线性滤波器面临维数问题 [17]或分歧或两者兼而有之。维数灾难的影响往往会在大小为20或更大的状态矢量的高维状态空间模型中变得不利。这种分歧可能由于多种原因而发生,包括:i)基础物理系统的模型不准确或不完整; ii)完全捕获真实演化后验密度时的信息损失,例如,在高斯假设下设计的非线性滤波器可能无法捕获关键特征多模式后验密度,iii)描述状态空间模型的方程中的高度非线性,以及iv)数值误差。实际上,上述每个滤波器都有其自己的适用范围,并且存在一个对于整个应用范围而言被认为是有效的单个滤波器存在疑问。例如,由于非线性函数的一阶泰勒级数逼近,EKF在过去四十年来一直是许多实际应用中的非线性滤波问题的首选方法,仅在“温和”的非线性环境中工作良好。
本文的目的是推导出更精确的非线性滤波器,该滤波器可用于解决非线性滤波器的广泛范围问题(从低维到高维)。在这里,我们采用本地方法来建立一个新的滤波器,我们已经命名为小容量卡尔曼滤波器(CKF)。已知当所有条件密度假定为高斯时,贝叶斯滤波器变得易于处理。在这种情况下,贝叶斯滤波器解决方案简化为计算多维积分,其积分都是形式非线性函数 times; 高斯。CKF利用了高效数值积分方法的特性,这些方法被称为多维积分的倍尺度规则[18]。根据我们掌握的体积规则,我们可以通过线性估计理论来描述推导新的滤波器作为非线性滤波背后的基本原理,因此称为“容积卡尔曼滤波器”.CKF在数值上是精确的并且易于扩展到高维问题。
本文的其余部分组织如下:第二节推导高斯域中的贝叶斯滤波器理论。 第三节描述了在贝叶斯滤波器中遇到的矩量积分的数值方法。 在第四节中推导出使用三阶球面 - 径向立方规则的容积卡尔曼滤波器。我们在第五节阐述了选择三阶规则的论点。在第六节,我们继续推导出CKF的平方根版本以提高数值稳定性。现有的sigma-point法与第七节中的倍增法相比较。我们在第八节中将CKF应用于两个非线性状态估计问题。第九节总结了可能扩展CKF算法进行更一般设置的论文。
第二节
贝叶斯滤波理论在高斯域中的应用
在高斯域下研究贝叶斯过滤器理论的关键是预测密度 和过滤器似然密度 都是高斯的,最终导致高斯后验密度。高斯之所以是最方便和广泛使用的密度函数,因为:
sdot; 它有许多独特的数学特性。
高斯族是关闭的在线性变换和条件下。
不相关的联合高斯随机变量是独立的。
sdot; 它凭借概率论的中心极限定理来逼近许多物理随机现象(更多细节参见[19]第5.7和6.7节)。
在高斯近似下,贝叶斯滤波器的函数递归减少为代数递归,该代数递归仅在时间和测量更新中遇到的各种条件密度的均值和协方差上操作。
A.时间更新
在时间更新中,贝叶斯过滤器计算平均值和相关的协方差 的高斯预测密度如下:
(8)
E是统计期望算子。将(1)代入(8)得
(9)
因为 被假定为零均值并且与过去的测量值不相关,我们得到
(10)
是高斯密度的常规符号。类似地,我们获得误差协方差
(11)
表1
Kalman过滤框架
B.测量更新
众所周知,预测测量误差是零均值白色序列[2],[20]。这些误差在这些设定之下可以很好地通过高斯转化,我们写出滤波器似然密度
(12)
预测测量
(13)
相关的协方差
(14)
因此,我们写出联合状态和测量的条件下的高斯密度
(15)
交叉协方差
(16)
在收到新的测量,贝叶斯过滤器从(15)中得到后验密度
(17)
(18)
(19)
(20)
如果f(sdot;)和h(sdot;)是状态的线性函数,高斯假设下的贝叶斯滤波器可以简化为卡尔曼滤波器。表I显示了如何在卡尔曼滤波框架中调用上面导出的数量。
图2中的信号流程图总结了贝叶斯滤波器的递归循环中涉及的步骤。因此贝叶斯滤波器的核心是如何计算高斯加权积分,其被积的部分是(10),(11),(13),(14)和(16)中存在的所有形式的非线性函数 times; 高斯密度。下一节将介绍用于计算多维加权积分的数值积分方法。
图2. 在高斯假设下的递归贝叶斯滤波器的信号流图,其中“G-”代表“高斯 - ”。
第三节
矩量积分的数值方法综述
考虑来自f(.)的一种多维
全文共17116字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9518],资料为PDF文档或Word文档,PDF文档可免费转换为Word

