英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
二维规则波状表面橡胶的真实接触面积及摩擦性能
Kenji Matsuda a,n, Daisuke Hashimoto a, Kenya Nakamura b
a九州工业大学机械与控制工程系, 1-1, Tobata-ku, Kitakyushu-shi, Fukuoka 804-8550, Japan
b东京工业大学大学院理工学研究科, 2-12-1, Ookayama, Meguro-ku, Tokyo 152-8550, Japan
文章信息
文章历史:
2014年8月28日收到的订正表10
2014年11月13日被认可
2014年11月24日可在线浏览
摘 要:本文以三种硅橡胶块为试件,研究了二维规则平面波纹面的弹性接触及其摩擦行为。波状表面谷的形状对摩擦力和实际接触面积有明显的影响。在带有U形槽的试样中,每个接触点在完全接触之前都接触到邻近的物体,从而导致渗流通道的消失,使流体流动。如果在潮湿环境中进行试验,当每个接触点接触到邻近的物体时,实际接触面积随载荷的增加速度急剧下降,这抑制了摩擦力的增加。
关键词:纹理、真实接触面积、摩擦力、人造橡胶
2014爱思唯尔有限公司保留所有权利
- 介绍
一般来说,固体之间的接触是不连续的,接触的实际面积是名义接触面积的一小部分[1]。Greenwood和威廉姆森[2]已从理论上证明假设所有接触的微凸体具有相同的半径和凹凸高度统计学分布的球面实际接触面积的Ar几乎是线性正比于负载W。当球面凹凸半径的分布进行了亲水性[3]线性关系也得到了证实。这些结果表明,与粗糙峰有关的信息成为评价实际接触区生长的重要因素。
另一方面,对于软质固体,如橡胶,在界面处可能发生完全接触。Archard [4]就用聚甲基丙烯酸甲酯(PMMA)进行交叉圆柱摩擦试验然后得出结论,在低负荷时,摩擦系数是正常负荷恒定的和独立的,然而当载荷增加,摩擦系数随负荷下降。因此,很有必要明确横向间隔的微凸体间的相互作用的影响时,房/表观接触率超过特色。Hyuu等人[5]用有限元法研究了随机粗糙表面与平坦表面之间的弹性接触,以获得更大的真实/表观接触比。杨等人[6]已经发展了多尺度分子动力学方法来研究从小接触到全接触的真实接触面积和界面分离。结果表明,实际/表观接触比与平均接触压力曲线趋于增加接触压力降低坡度。此外,Manners[7]指出,在有限的压力下,随机表面不能达到完全接触。
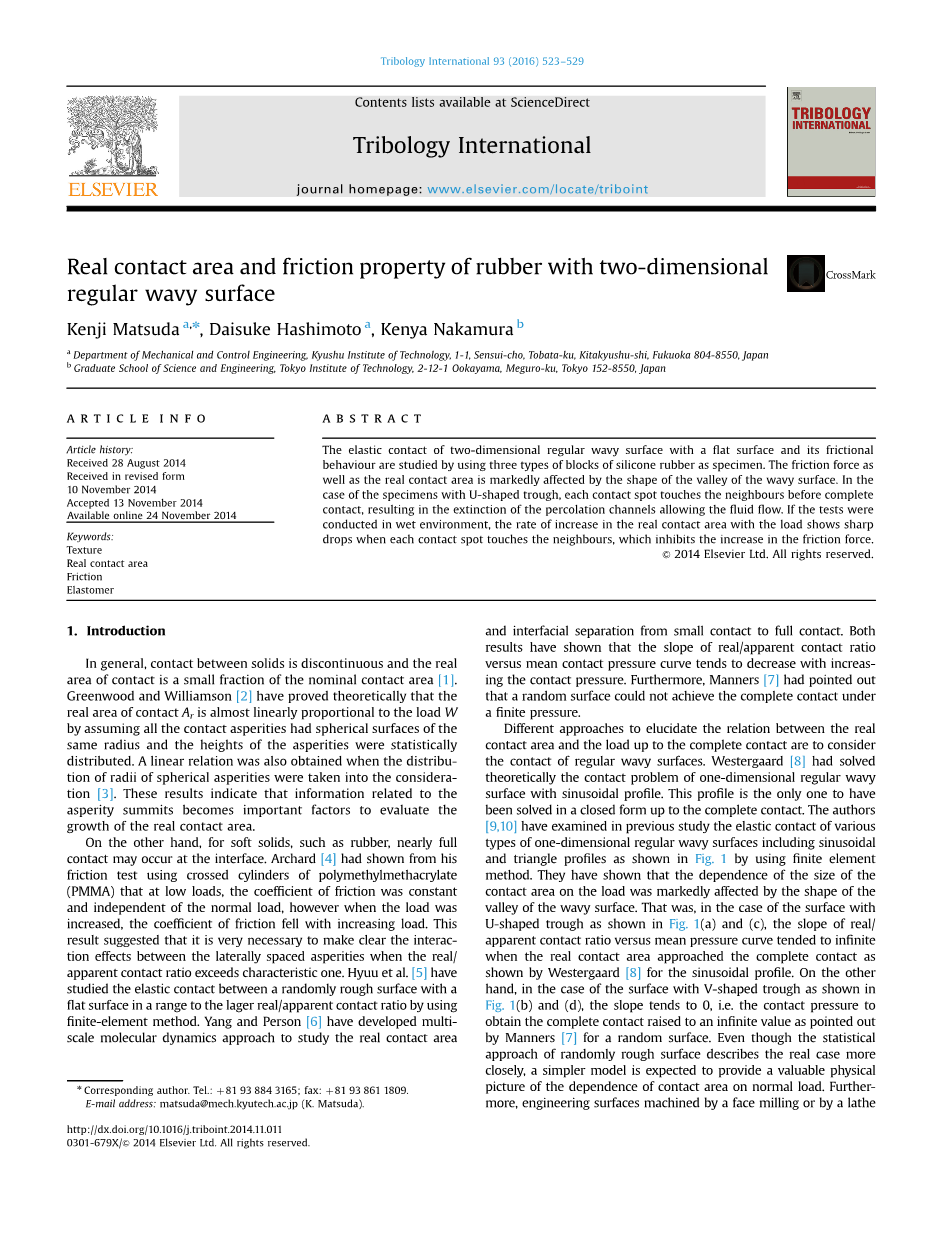
用不同的方法,阐明真正接触面积之间的关系是考虑的接触规则的波状表面和负载的完整接触。Westergaard[8]有理论上的一维规则波浪表面接触问题求解的正弦曲线。此配置文件是唯一的一个已经解决了在一个封闭的形式,直至完全接触的问题。作者[9,10]在先前研究的各种类型的一维规则的波浪状的表面,包括正弦和三角分布如图1所示,采用有限元方法进行弹性接触。它们表明,接触面积大小对载荷的依赖性受波浪表面谷的形状的显著影响。在U形槽如图1所示的表面情况(a)和(c),房/表观接触比与平均压力曲线趋于无穷大时,实际接触面积接近完整的联系如Westergaard[8]做的正弦曲线斜率。另一方面,在如图1(b)和(d)所示的v形槽的表面的情况下,斜率趋向于0,也就是说,接触压力是通过随机表面[7]指出的,以获得完整的接触到无穷大值的接触压力。尽管随机粗糙表面的统计方法更接近于真实情况,但一个更简单的模型有望为正常载荷下接触面积的依赖提供一个有价值的物理图像。此外,通过面铣或车床加工的工程表面的特征是有一系列的刀具痕迹。所以考虑规则的波状表面的接触是值得的。
Johnson等人[11]通过数值计算和实验研究,研究了二维正弦表面的接触,并指出随着载荷的增加,在完全接触之前接触到相邻的点,每个接触点的大小和形状都会改变。虽然在他们的实验中,在接触体上钻了小孔会释放被困的空气,但是结果给我们很有用的信息,了解在全接触的接触面积增长的行为,因为在流体泄漏现象从交配表面离散的接触点的科尔斯荧光在二维粗糙表面的接触中起着重要的作用。作者[12]显示了三种二维规则波状表面在空气减压环境中的渗流通道和波浪表面的山谷形状显著影响下的允许从交配表面流体泄漏的形成的真实接触面积增长进行了比较。这样的山谷的形状以及真正的接触面积肯定会成为摩擦行为的一个关键因素。
本研究的目的是阐明摩擦力如何通过接触面的纹理设计来控制。在干燥和潮湿条件下,对三种硅橡胶块与二维规则波状表面和平板玻璃表面进行了滑动试验。通过掌握真实接触面积的增长,研究了摩擦副表面轮廓和流体存在对摩擦力的影响。众所周知,聚合物的摩擦可以归结为两个来源,一个变形项和一个粘着项起源于配对表面之间的界面[13].最近通过密切调查[14-21]研究了微观和宏观图案化弹性体摩擦的地形依赖性。这些结果对我们理解摩擦产生的可能机制有很大的帮助。此外,已有一些研究基于渗流理论[22-25]来探讨密封中流体泄漏的机理和界面上的流体流动。尽管如此,似乎没有人注意到山谷的形状。在这项研究中,我们专注于表面轮廓,特别是山谷形状如何控制渗流通道的形成和接触面积,然后我们澄清了它对摩擦性能的贡献。
图1一维规则波状表面的典型剖面:(a)正弦;(b)三角形;(u)u形谷序列;(d)V形谷序列
实验程序
2.1试验样品
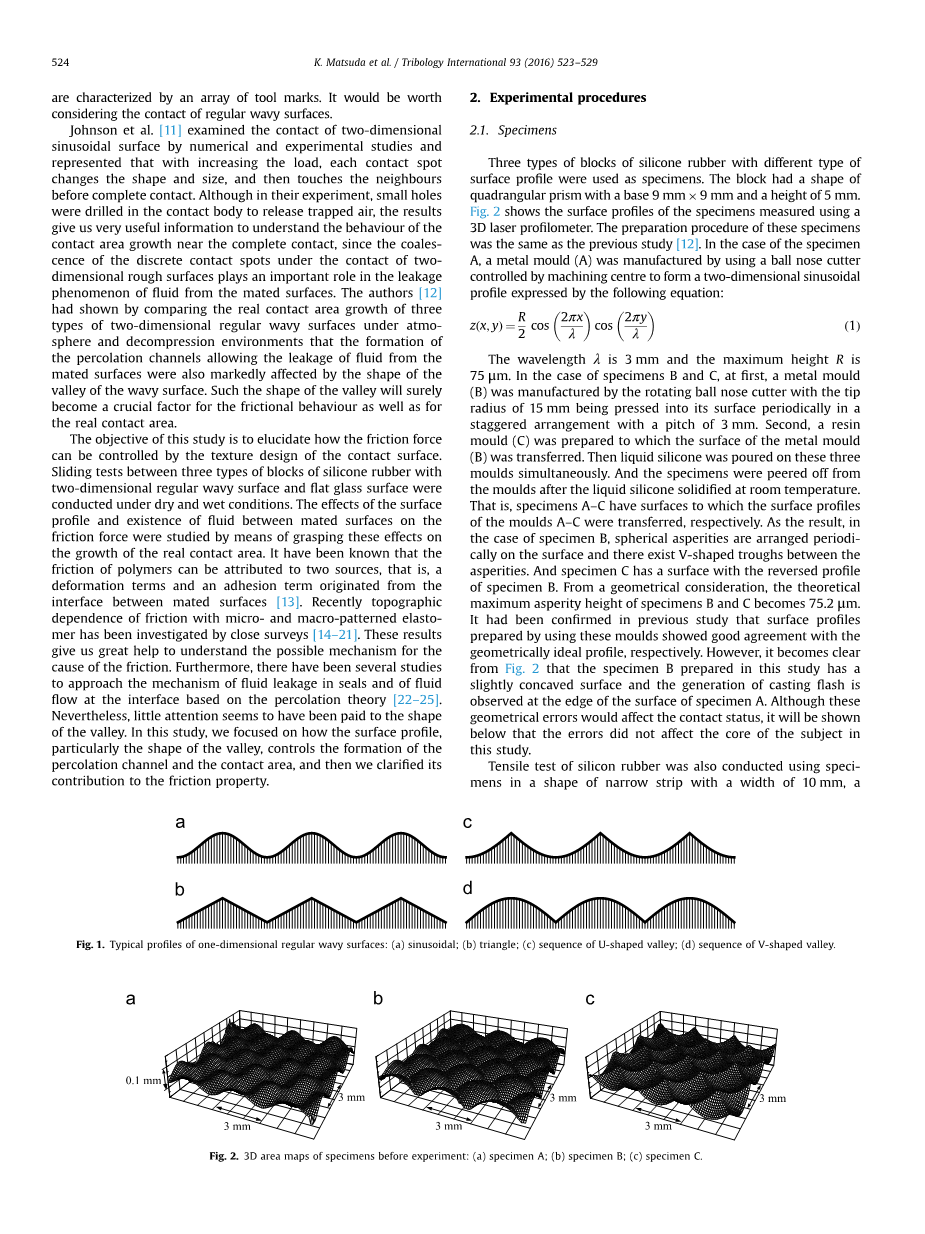
使用三种具有不同类型的表面轮廓的硅橡胶块作为样本。该块具有四边形棱柱的形状,其具有9mmtimes;9mm的基部和5mm的高度。图2显示了使用3D激光轮廓测量仪测量的样品的表面轮廓。这些标本的制备过程与以前的研究相同[12]。在试样A的情况下,通过使用由加工中心控制的球头切割器来制造金属模具(A),以形成由以下等式表示的二维正弦曲线:
波长lambda;为3mm,最大高度R为75mu;m。在样品B和C的情况下,首先是金属模具(B)由旋转球头切割机制造,其尖端半径为15mm,以3mm的间距以交错布置方式周期性地压入其表面中。其次,制备树脂模具(C),将金属模具的表面制成模具(B)转移。然后将液体硅胶同时倒在这三个模具上。液体硅树脂在室温下固化后,将试样从模具中剥离下来。也就是说,样品A-C分别具有转印有模具A-C的表面轮廓的表面。结果,在样品B的情况下,在表面上周期性地排列球形凹凸并且在凹凸之间存在V形凹槽。样品C的表面具有与样品B相反的轮廓。从几何考虑,样品B和C的理论最大不均匀高度变为75.2mu;m。在以前的研究中已经证实,使用这些模具制备的表面轮廓分别与几何理想轮廓分别显示出良好的一致性。然而,从图2中可以清楚地看出,在本研究中制备的试样B具有略微凹陷的表面,并且在试样A的表面边缘处观察到了铸造毛边的产生。虽然这些几何误差会影响接触状态,它将在下面显示,这些错误并未影响本研究中的主题。
图2实验前样品的三维面积图:(a)样品A; (b)标本B; (c)标本C
还使用10mm宽度,2mm厚度和约120mm长度的窄条形状的试样进行硅橡胶的拉伸试验。当将液体硅酮浇注到块状试样的模具上时,同时制备拉伸试样,直至30%应变的应力-应变曲线近似为直线并且杨氏模量被确定为0.59MPa。
2.2测试仪器
图3显示了实验装置的示意图。试样的波状表面被压入直角棱镜的底面。在正常的接触载荷达到预定值之后,通过电动工作台以0.5 mm/s的恒定速度将块状样品向左移动。法向载荷和横向力的变化分别使用连接到制造的悬臂上的应变计来测量,以分别监测这些力。使用激光位移计测量电动级的位移。为了阐明配合表面之间存在流体的影响,测试在以下两种环境下进行:
- 干燥状况; 该测试是在大气中进行的。
- 潮湿状况; 实验前两个配合表面的间隙充满水。
在入射角为451时,界面被LED灯照亮,并且数字照相机观察到反射。在干燥条件下进行测试的情况下,在非接触区域发生全反射。另一方面,在潮湿情况下,没有发生全反射。即使在这种情况下,与从上方观察界面的情况相比,也可以获得更高的对比度图像。接触图像的变化是通过在数码相机的连续模式下的序列拍摄获得的。连续的拍摄帧速度约为3 / s。与正常负载,侧向力和平台位移信号同时记录与摄像机快门释放同步的频闪发射信号。基于通过二值化处理获取的二值图像计算真实接触面积。在这个过程中,通过仔细比较二值化前后的图像,密切关注由原始图像的亮度不均匀性引起的和由二值化阈值的不合适值引起的误差。
图3实验装置示意图
3结果和讨论
3.1横向运动前实际接触面积的变化
图4-图6显示出了在接触表面的横向方向上的阶段移动开始之前(包括紧接着)观察到的接触图像。这里,因为从45°方向观察界面,所以图像在垂直方向上被放大约1.4倍。每幅图像中的黑色部分表示真实的接触面积,干燥状态下的白色部分或潮湿状态下的浅色部分分别表示非接触面积。在具有二维正弦曲线轮廓的样本A的情况下,随着负载的增加,每个接触点将形状从圆形改变为正方形,然后接触邻居,从而导致渗流通道的消失,从而泄漏流体。接触图像的变化类似于Johnson等人所显示的变化[11]。之后,如果测试是在干燥条件下进行的,真实的接触面积会随着负载的进一步增加而增加。
另一方面,如果测试是在潮湿条件下进行的,则在每个接触点接触邻居之后,真实接触面保持几乎相同的方面。在具有U形槽的试样C的情况下,每个接触点的形状呈正方形并且在对角线方向上扩展,然后以比标本A的情况小得多的接触面积接触邻居。类似于情况对于试样A,如果试验是在潮湿的环境中进行的,则在每个接触点与邻居实际接触区域的形状和尺寸几乎没有变化。
图4试样A在横向运动前的接触图像:(a)干燥状态;(b)潮湿状态
图5横向运动前试样B的接触图像:(a)干燥状态;(b)潮湿状态
图6横向运动前C试样的接触图像:(a)干燥状态;(b)潮湿状态.
图7横向运动前AR与W的关系:(a)A试样;(b)标本B;(c)标本C
另一方面,在具有V形槽的样本B的情况下,每个接触点将形状从圆形改变成圆角形正方形。存在于接触点之间的网格状非接触区域即使在接触点通过增加负载而彼此接近时也几乎不会消失,这导致流体从配合表面泄漏。因此,在干燥的情况下,当负载达到最大值时,小角部保持非接触。尽管在潮湿情况下,当负荷超过约3N时,接触图像保持几乎相同的情况,但这似乎主要是由于抑制了试样表面边缘处的流体泄漏造成的。
图7显示了真实接触面积Ar和法向载荷W之间的关系。为了比较,在前面的研究[12]中在减压环境下进行的正常接触的结果也绘制在该图中。在此,先前研究中实际/表观接触面积比与平均压力之间的关系分别通过乘以9times;9 mm2的表观接触面积转换为Ar和W在减压环境下进行的结果表明,每个接触点的聚结发生在标本A约0.7N的正常负载和标本C约0.4N的正常负载。很明显,在标本A和C的情况下,如果测试是在大气或潮湿的环境中进行的,则当每个接触点与邻居接触时,实际接触面积的增加速率显示急剧下降,尤其是在潮湿状态下,之后速率进一步下降,然后实际接触面积倾向于几乎保持不变的价值。结果,渗透通道的消光在较小的法向载荷下发生的样品C在滑动前保持整个载荷的最小接触面积。另一方面,在具有V形槽的试样B的情况下,渗流通道几乎不会消失。在这种情况下,配合表面之间的流体对真实接触面积的增长几乎没有影响,尽管在潮湿情况下,接触面积在正常负荷超过约3N后几乎保持恒定值,如图5。
3.2横向运动的影响
图8显示了法向载荷W、横向力F和真实接触面积Ar随着载物台运动距离的增加而变化的结果。在阶段运动开始之后,横向力随着距离L几乎线性地增加,然后变为近似稳定状态而不依赖于L。正常负荷随着横向力的增加而略微增加。W的增加被认为是由块体试样的变形引起的,其中界面处的横向力产生弯曲力矩。图9示出了对应于图8的接触图像的变化。在横向力的增加期间,橡胶的前导前沿周围的接触看起来强烈地压入棱镜的底表面并且接触到后端周围从一个导致实际接触面积减少的结果中释放。之后,接触表面开始全面滑动,并且接触图保持几乎相同的方面,这导致横向力的稳定状态以及真实的接触区域。
本研究中几乎所有的结果都显示了与图8相似的趋势,并且这种真实接触面积变化的趋势也与Eguchi等人观察到的相似[26]粗糙的橡胶半球和玻璃在无润滑条件下。但是,在试样C处于较高法向载荷的潮湿条件下时,实际接触面积的变化稍微复杂一些。图10示出了在图6(b)所示的样品沿横向移动约3mm之后的接触图像。这里,由于上述原因,图2和图3之间的法向载荷W与图6和10有一点差异。从图10中W = 6.95 N的图像可以看出,尾端接触的释放导致在后端周边处捕获的流体的排气通道的形成,并且流体的释放导致实际接触面积的增加。这个结果表明被困在配合表面的水被加压并支撑着接触法向载荷的一部分。即使在这种情况下,在整体滑动开始之后,实际接触面积和侧向力几乎保持恒定值。由于在阶段位移L达到3mm之前开始发生整体滑动,所以在这项研究中,正常载荷,横向力和Lasymp;3mm处的接触面积被批准用于评估摩擦性能。
3.3. 影响摩擦特性的因素的影响
图11示出了Lasymp;3
全文共11858字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9167],资料为PDF文档或Word文档,PDF文档可免费转换为Word

