文章:如何调整设计为混合动力储能系统工作的模型—电池与双层电容器的组合模型
摘要—电池双层电容器(DLC)单元在车辆推进、辅助动力装置和可再生能源应用中是很受欢迎的混合动力储能系统(HESS)。HESS的安全性及理想操作对其组成子系统提供实时监测。本文中,我们使用基于模型的方法来观测HESS中每一个子系统的工作并提出了一种在线状态估计和参数估计相结合的方法,方案采用耦合电-热动力学模型。特别地,我们着重关注一个HESS组合即一种铅酸电池(PbA)和一种用于已经被设计出来验证模型初始参数实验的DLC。该估计方案采用了一种新的基于观测器的级联结构:(1)基于滑模方法设计,(2)利用电动力学和热动力学的耦合。利用李亚普诺夫的参数,推导了状态和参数收敛的理论条件存在不确定性的估计。通过仿真和实验验证了估计方案的有效性即研究PbA电池、DLC和HESS系统。
索引—电池,双层电容器(DLCs),混合储能系统(HESS),滑模观测器,状态和参数估计。
I. 介绍
电池,双层电容器(DLC)混合动力储能系统(HESS)是一种新兴的且流行于各种应用程序中的系统。传统上,电池被用作汽车的辅助动力单元是由于可再生的固定能源存储受到低功率密度的影响。相比之下,DLCs具有较高的功率密度,可以抵消峰值情况时电池的负载[1]。因此,组合电池- DLC HESS适用于汽车冷启动、启动/停止、混合动力汽车(HEV)推进和可再生能源[2][3]。
使用电池dlc HESS的主要优点除了是传统的纯电池储能系统,更主要的是负载
电池和DLC之间可以共享同时也能减轻对电池的压力,从而延长其使用寿命[4]。HESS的负载共享可以是主动的也可以是被动控制。一个无源HESS包含一个电池与无控制器的DLC并联。一个有源HESS包括一种无源HESS和一种功率电子器件为了去控制电池之间的功率分配的装置和数据链路控制。无论是被动或主动控制,实时HESS状态和参数的监测对于确保安全、高效、优化的HESS运行来说至关重要的。本文提出了一种基于模型的实时状态和参数提出了两种方法的估计方案可运用于无源或有源电池- DLC HESS。本文的主要焦点是介绍了自动启动/自动停车在短时间内需要高功率汽车上的应用。如此,本文提出的建模与估计方法很容易扩展到其他混合应用程序的潜力,如冷启动发动机和HEV充电持续操作。
优化电池的重要状态和参数性能以及寿命包括荷电状态(SOC),内部抵抗,和容量。特别是内阻和容量,是电池健康(SOH)和衰老状态的有用指标。现有的文献[5]—[7]提供电池的不同的在线状态和参数估计方法。有一种方式是使用电化学模型。但计算量大是其主要缺点
,尽管他们的预测可能更高更准确。这导致使用计算使更简单——达到用于控制和估计的等效电路模型(ECMs)的目的。在本文中,我们将使用ECM进行估计计划。在ECM中,最常用的估计方法是基于卡尔曼滤波(KF)的方法,如线性KF,扩展KF (EKF)和自适应EKF[8],[9]。除了基于kf的方法,基于ecm的估计方案包括非线性观测器[10],滑模观测器[11]—[14]以及线性参数变化(LPV)系统技术[15]。然而,这些现有的方法存在一些缺陷。例如,广泛使用的基于kf的方法受到了影响:1)对估计缺乏理论验证无迹KF/EKF的误差收敛性和;2)高噪声协方差矩阵的非平凡刻画。虽然其他的估计方案(比如:滑模观测器、非线性观测器和基于lpv的方法)一般常提供理论误差收敛证明,不过他们考虑等温条件。然而,电动力学和热动力学的耦合在预测电池性能中起着至关重要的作用。
与电池类似,DLCs在不正常的操作条件下对老化也很敏感[16]。为了有效控制DLC的老化,有必要对其进行监测和估计[17],[18]。对于DLC, ECM中的电阻和电容分别代表内部阻抗和电荷容量,被认为是SOH指标[19]。然而,与电池相比,DLCs的状态和参数联合估计在文献中较少被研究。在[1]和[20]中,是通过EKF估计器实现DLC状态估计。在[21]和[22]中是利用最小二乘技术研究了参数估计问题。在[23]中探讨了电热式DLC模型的离线参数辨识问题。然而,很少有研究考虑实时组合状态和参数估计问题。比方说,[18]在使用dual-KF-based approach时会暴露出该问题。尽管如此,最主要的弊端是在缺乏:1)理论收敛性证明和;2)考虑电-热耦合。
针对上述问题,本文提出了一种基于ECM的电池- dlc HESS估计方案。本文的主要贡献如下。
- 对于电池和DLC的估计,本文提出的方案包括对组合状态和参数误差收敛的理论验证,并考虑了电-热耦合。
- 提出了一种基于级联观测器的电池状态和参数估计方法。该框架利用电-热耦合分解整体估计问题,简化了观测器的设计。
- 本文包括了DLC和铅酸蓄电池系统的实验验证模型。最后,利用实验数据对估计方案的有效性进行了评价。
本文在我们以前发表的成果上进行拓展[24]通过:1)在模型中明确考虑不确定性,给出收敛证明;2)利用实验验证的电池和DLC模型;3)利用实验数据验证了估计方案的性能。该估计方法基于滑模观测器和等效输出误差注入[25]。此外,所提出的基于滑动模态的电池估计方案与以往的滑动模态方法[11]—[14]的不同之处在:1)包括耦合热动力学和电动力学;2)提出了一种新的基于观测器的级联结构。
本文的其余部分组织如下。第二部分简要介绍了HESS元素的建模。第三节介绍了所提出的估计方案。第四节讨论了无源电池dlc HESS的识别,第五节给出了仿真和实验研究。第六部分总结结论。
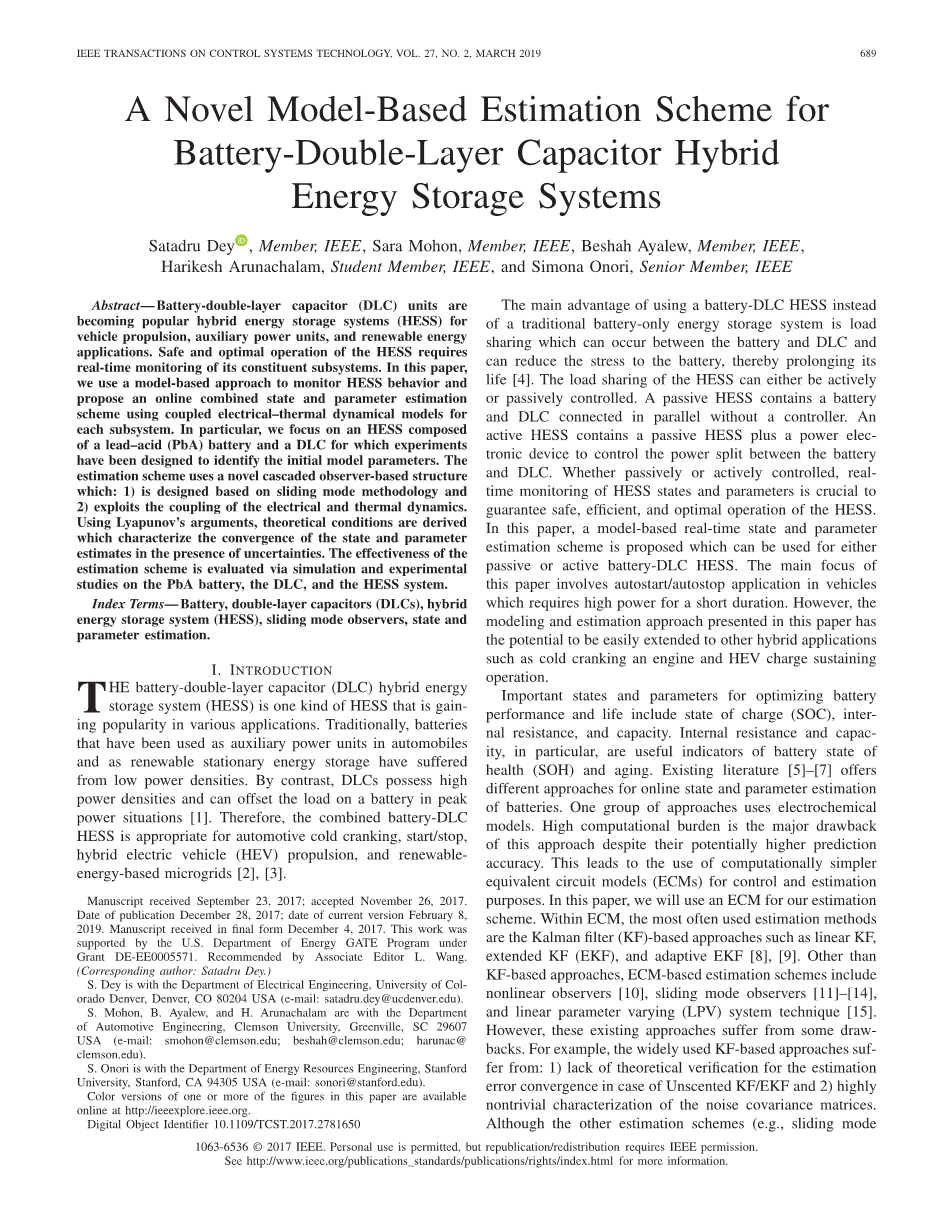
图一Battery ECM
II.混合储能系统模型
正在考虑的HESS由电池和DLC组成。本节将讨论这两种储能装置的建模。
A.电池模型
本文采用一阶电路模型(图一)和集总热模型对电池进行建模[26]
利用基尔霍夫定律和SOC定义,研究了电池的电动力学
其中Vbatt是端电压,Ibatt是输入电流(放电为正,充电为负)R,R0,C0分别为电阻和电容的电路,Vc是电容的电压,C0,E0是开路电压(OCP),Q是电池容量。电池集总热模型[27],[28]由:
推出,其中Tbatt是电池温度,Mcbatt是质量乘以电池的比热容,HAbatt是有效传热系数,Tamb是室温。
备注1:一般来说,电池模型参数和OCP是SOC和的函数和Tbatt。然而,对于本文所考虑的应用,假设模型参数在较小的SOC范围内是相当恒定的。OCP仍然是SOC和电池温度的非线性函数,可以写成
B.双层电容器(DLC)模型
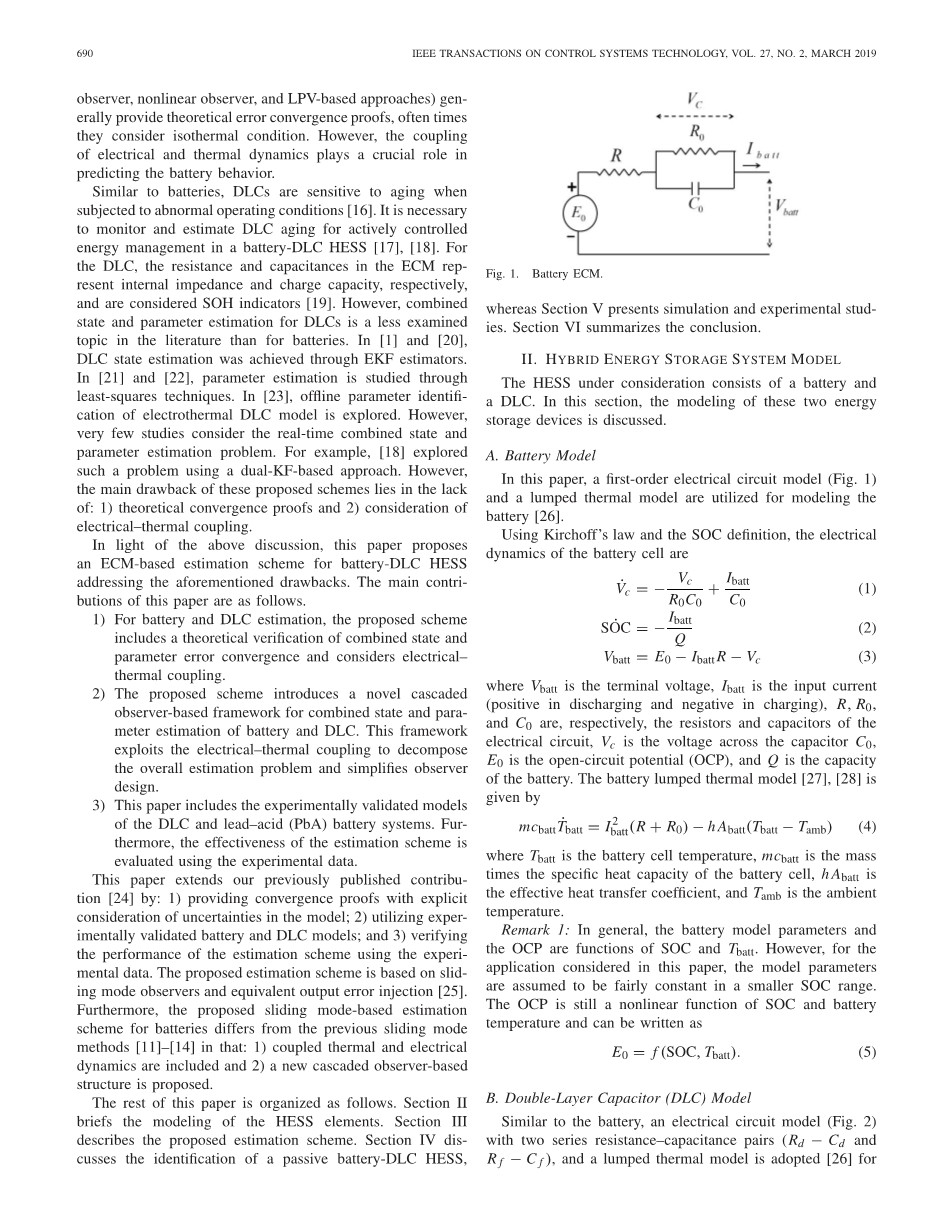
类似于电池,有一个电路模型(图二)具有两个串联电阻-电容对(Rd -Cd and
Rf-Cf)并对DLC采用集总热模型[26]。
图二Electrical ECM of DLC
(Rd -Cd and Rf-Cf)分支分别代表了DLC的慢动态和快动态。
电容之间的电压动态Cd和Cf可写成
其中Vcf是电容Cf电压,Vcd是电容Cd电压,Id是流经Rd-Cd分支的电流,If是流经Rf-Cf分支的电流,流经DLC的总电流Idlc是由Kirchoffrsquo;s current law推导:
DLC的电压Vdlc由:
其中Rf,Rd都是电路电阻,DLC的集中热动力学是:
其中Tdlc是DLC的温度,mcdlc是质量乘以DLC的比热容,hAdlc是热传导系数。(10)中的热产生项不包括电阻Rd的效应,这是合理的,因为通过Rd的电流明显小于通过R f的电流。因此,忽略了Rd对热产生的影响[26]。
备注2:实际上,DLC模型参数R f、Rd、C f和Cd取决于SOC、温度和电流[17]。然而,实验结果来自[17],而DLC厂家的数据表显示,这些参数主要是温度的函数,而电流、SOC等其他运行条件的影响可以忽略不计。此外,参数值随年龄的变化而变化,但变化速度要比相应的状态动力学慢得多。
备注3:来自HESS的实时测量包括:来自电池的Ibatt、Tbatt和Vbatt,以及来自DLC的Idlc、Tdlc和Vdlc。
III.OBSERVER-BASED估计方案
在本节中,描述了HESS的在线估计方案。该估计方案由一组滑模观测器和开环模型组成。在第三- a和第三- b节中,分别讨论了电池和DLC估计的方案。
备注4:在滑模观测器的设计中,观测器的结构由装置的副本和一个使用可用测量值的开关反馈项组成[25]。必须定义一个滑动流形,如果观测器增益设计正确;即使存在建模/参数不确定性,滑动流形也是在有限时间内得到的。接下来,我们将讨论滑模的基本概念,以及如何使用滑模观测器来估计未知的系统参数。
滑模观测器和等效输出误差注入的基本思想:考虑一个标量一阶线性系统:
其中xisin;R为被测状态,因此作为输出,uisin;R为已知界|u|le;macr;u的已知输入,aisin;R为已知参数,bisin;R为已知上界|b|le;macr;b的未知参数。其目的是利用滑模观测器估计未知参数b(另一方面测量状态)。然而,为了推导参数估计的数学表达式,我们将状态估计误差收敛作为中间步骤。系统的滑模观测器(11)是由得出,其中是估计状态,tilde;x = xminus;circ;x是估计错误,L是观察项,滑动流形是= 0。估计误差动态可表示为:
考虑李雅普诺夫函数候函式人V = 0.5sup2;,估计误差的收敛动力学可以分析通过考虑李雅普诺夫函数的导数的上界的参考:
在的情况下,,其中,微分不等式的解(14)是,因此,滑动流形是在有限时间内得到的,以及,。此外,切换项 可以被所谓的等效输出误差注入词所取代[25]。因此我们可以从(13)中得到
其中eeq相当于输出错误注入术语的连续近似或 的过滤版本,为了实现目的,计算术语eeq通过一个低通滤波器如下:
用一个短时间常数tau;gt; 0,我们得到
然后,不确定参数b可以估计为:
备注5:从以上分析可以看出滑模观测器的两个重要性质。首先,估计误差在有限时间内收敛为零。其次,等效输出误差注入项可以用来估计一些不确定的模型参数。本文利用这两种特性对电池和DLC的状态和参数进行了综合估计。
- 电池状态和参数综合估计
在本节中,我们详细介绍了在线估计电池状态和参数的方案。我们感兴趣的重要变量是SOC、R和q。如图3所示,在线估计方案由三个观察项组成:
1)观测项I(基于热动力学);
2)观察项II(基于电动力学);
3)观察项III(基于SOC动力学)。
观察项I使用温度和电流测量来估计参数R。观察项II使用开环模型估计了Vc的电气状态。观察项III分别根据观察项I和观察项II测得的电压、电流和估计的R、Vc来估计状态SOC和参数Q。基于式(2)的开环库仑计数法通常对电池SOC进行估计,由于传感器噪声和积分器漂移的存在,这种开环方法容易产生误差。OCP一般是SOC的非线性函数。在该方案中,我们利用了由观察项I和观察项II的状态和参数估计得到的OCP估计值。这个OCP是SOC的一个函数,它作为一个人工创建的非线性伪量,然后作为观察项III的输出误差注入。这个估计的OCP本质上有助于为SOC估计创建一个闭环观测器,从而减少上述不确定性的影响。在设计估计方案时,我们做了以下假设。
假设1:给定备注1,在混合应用程序考虑的SOCisin;[SOCmin, SOCmax]范围内,参数R、R0和C0为常数。
假设2:电参数R0、C0、热参数mcbatt、hAbatt已知,精度足够。这些参数的值可以通过离线实验识别技术找到[32]。
备注6:在网上估计方案中,我们选择估计总电参数的一个子集,即, {R, Q}从总集合{R, Q, R0,C0}。这是因为,如果所有参数都是未知的,那么这些参数就不是惟一可识别的。另以方面,假设只有一个子集是未知的,这将使参数具有惟一的可识别性。因此,只选择了参数的子集进行估计。然而,子集的选择是一个依赖于用户的选择。在这个特例中,我们假设电池老化对R和Q的影响最大。还可以假设参数{Q, R0,C0}是未知的,并且很容易应用所提议的方案。
假设3:OCP E0是SOC在任意给定温度[SOCmin, SOCmax]范围内严格单调递增的函数。注意,这一假设已经在大多数流行的电池化学反应中得到验证,如PbA、licoo2 -石墨、lifepo4 -石墨和NiMH[29]-[31]。
引理1:通过假设3,对于给定的Tbatt = T*batt,给定SOCisin;[SOCmin, SOCmax]范围内SOC域中任意两点SOC(1)和SOC(2)以及它们对应的OCP值,即, E(1)0= f (SOC(1), T*batt), E(2)0= f (SOC(2), T*batt),如下所示:
从普通电池的OCP-SOC曲线可以很容易地验证这一点。给出了存在不确定性情况下的电池
动力
其中eta;Vc,eta;SOCeta;V,eta;Tb建模不确定性,可状态和/或输入相关的。换句话说,我们将这些不确定性视为有界的、未知的、外生的(可能是时变的)输入,作用于标称电池模型。
假设4:不确定性eta;i,我isin;{Vc、SOC, V,Tb}及其时间导数被假定为有界已知的有限值和。
备注7:的物理起源如下:
- 模型参数的状态和可能的输入依赖关系;
- 在大电流情况下出现的未建模动力学;
- 由制造可变性引起的参数不确定性;
- 退化引起的参数变化。
由于这些许多可能的来源,很难实现一个完整的和可伸缩的的表征。因此,我们采用这种简单的表示
全文共13019字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1613]

