英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
基于磁场等效电流分析的无轴永磁同步电动机径向力控制
Huangqiu Zhu and Hui Li
江苏大学电气与信息工程学院,中国镇江 212013
学术编辑:Enrico Sciubba
摘要:无轴永磁同步电动机(BPMSM)具有永磁电动机(PMSM)和磁力轴承的优点,已成为无轴电动机领域的重要研究方向。为了实现BPMSM的稳定运行,电磁转矩和径向悬浮力之间的精确解耦控制是必不可少的。本文提出了一种基于磁场等效电流的简洁可靠的分析方法。通过该分析方法,从理论上分析了工作原理,确定了产生稳定径向悬浮力的必要条件。此外,建立了扭矩和径向悬浮力的数学模型,并通过有限元分析(FEA)软件ANSYS进行了验证。最后,使用定制的控制策略测试2-4极表贴式BPMSM的实验原型。仿真和实验结果表明,该电机具有良好的旋转和悬浮性能,验证了所提出的分析方法的准确性和控制策略的可行性。
关键词:无轴永磁同步电动机;磁场等效电流;解耦控制;径向悬浮力
1. 介绍
无轴电机结合了传统电机和磁力轴承的特性。与磁力轴承相比,无轴电机具有轴长更短,临界速度更快,成本更低的优点[1]。在不同类型的无轴电机中,无轴永磁同步电机(BPMSM)因其体积小,重量轻,非接触,无磨损,无润滑,高效率,高功率因数等优点而在世界范围内受到高度重视。 [2]。它们在离心机,航空航天,生命科学等领域具有广泛的应用前景。特别是由于它们的非接触和无润滑特性,BPMSM成功应用于高纯度环境,如半导体,制药和医疗行业。
到目前为止,BPMSM的先进技术,包括数学模型,电机拓扑结构和控制策略,已经被研究人员广泛研究和讨论。在[3]中使用麦克斯韦应力张量法研究了表贴式BPMSM的完整数学模型,该方法可以有效地补偿转子偏心和洛伦兹力的影响。在[4]中,提出了一种基于电子坐标变换的新建模方法,被证明是一种有效的建模方法。对于电机拓扑结构,Ooshima提出了一种考虑2自由度BPMSM退磁的转子设计方法[5]。此外,在[6]中介绍了一种由3自由度轴向-径向磁轴承和2自由度BPMSM组成的5自由度BPMSM。与此同时,Kascak提供了另一种新型5自由度BPMSM,仅由两个锥形BPMSM组成,以实现5自由度主动控制[7]。对于控制策略,基于转子磁通定向控制(FOC)的解耦控制算法近几十年来已被广泛使用[4]。基于转子径向位移和径向悬浮力之间关系的直接径向位移控制策略在[8]中指出。此外,还提出了许多基于人工智能的有效处理非线性BPMSM系统的控制策略,如滑模变结构控制[9],人工神经网络逆控制[10]和遗传算法控制。双绕组BPMSM在定子槽中有两组耦合绕组,即转矩绕组(极对为) 悬浮力绕组(极对为PB)。因此,它们之间的精确解耦控制对于实现悬浮操作是必不可少的。在文献[11]中,通过标记扭矩绕组磁链和悬浮力绕组磁链的分布情况,研究出了径向悬浮力的产生原理。然后,通过二维有限元分析(FEA)模型可以验证感应式无轴电机相应的性能。基于这些方法,无轴电动机悬浮特性的分析变得简单,直接和可操作。然而,由于难以得到计算的系数,因此数学模型是不准确的。在[12]中,基于虚位移原理建立了表贴式BPMSM的数学模型。得出的思路如下:首先,根据等效磁路原理,推导出电感矩阵。然后推导出基于电感矩阵的电磁能量表达式。最后,径向悬浮力的数学表达式可以通过相对于电磁能表达式的部分推导来推导。该方法使得径向悬浮力的推导更容易且更直观。然而,由于电感参数难以精确获得,通过实验测量,也无法精确计算BPMSM的径向悬浮力。本文提出了一种基于磁场等效电流的精确可靠的分析方法。基于该分析方法,实际的电动机绕组由存在于不同材料空间中的等效绕组代替。这些等效绕组的分布仅取决于气隙磁场,并且它们不受机械结构特征的影响。气隙磁场之间的相互作用可以转换为携带电流等效绕组的相互作用。因此,可以避免一些复杂的磁场分析,有效降低系统分析的难度,为径向悬浮力的控制提供系统的理论基础。
2. 基于磁场等效电流的径向悬浮力分析
2.1. 磁场等效电流分析方法的基本理论
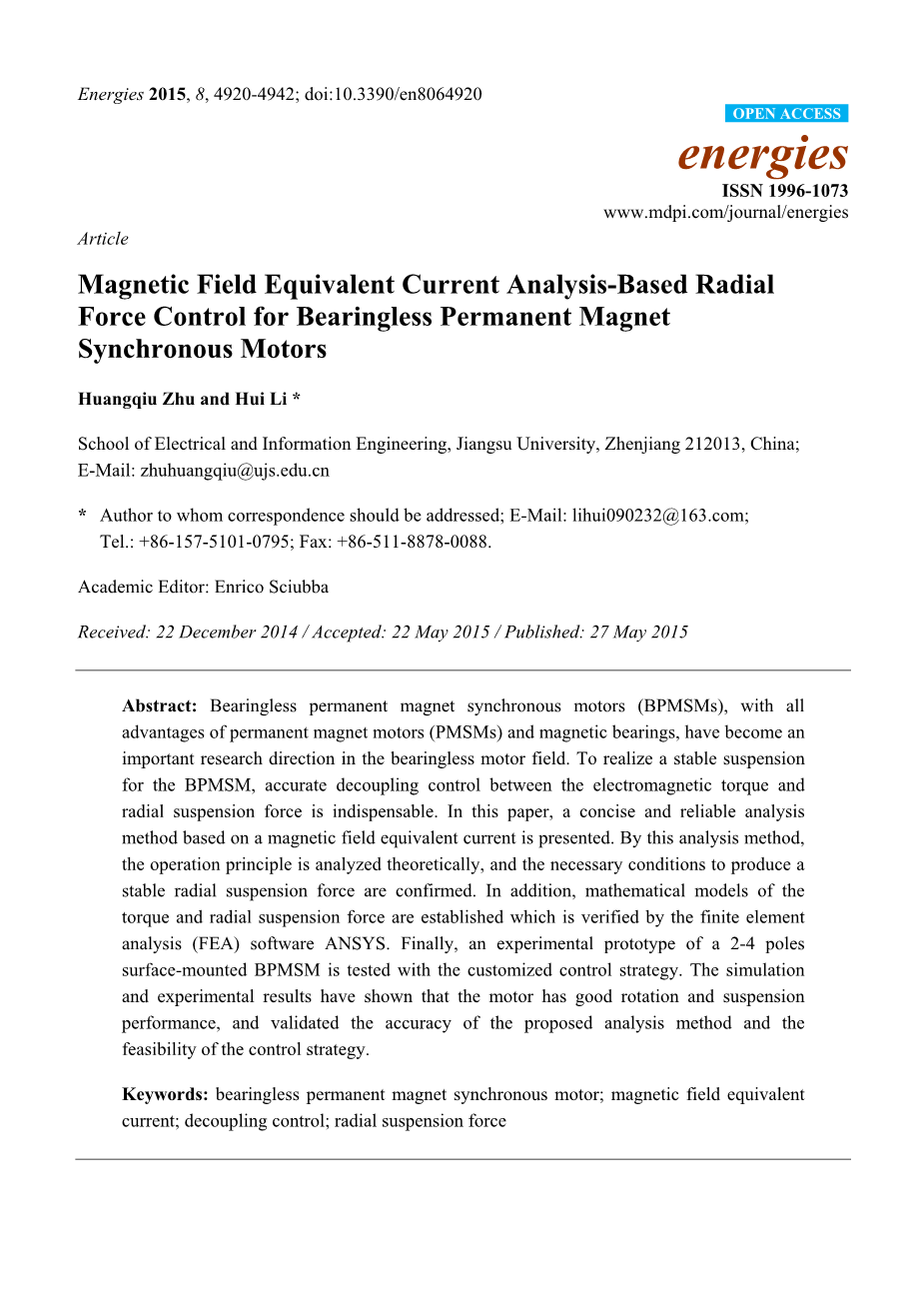
假设电机绕组设计为空间对称分布,忽略永磁体的漏电感和磁饱和,气隙中的磁导率在任何地方都相等。气隙磁场被认为是由一系列承载电流等效绕组产生的。等效绕组的极对数等于原始气隙磁场的极对数。等效绕组的分布是根据实际气隙磁场灵活设计的。本文采用了等效的全节距绕组,它们可以随着气隙磁场的变化而旋转。等效绕组中的电流被认为是直流电流。然后,可以间接地从相应的等效电流的角度获得扭矩绕组气隙磁场与悬浮力绕组气隙磁场之间的相互作用关系。图1显示了磁场等效电流分析方法的原理图。
图1.磁场等效电流分析方法示意图。(a)2极气隙磁场;(b)2极气隙磁场的等效绕组电流;(c)4极气隙磁场;(d)4极气隙磁场的等效绕组电流。
|
|
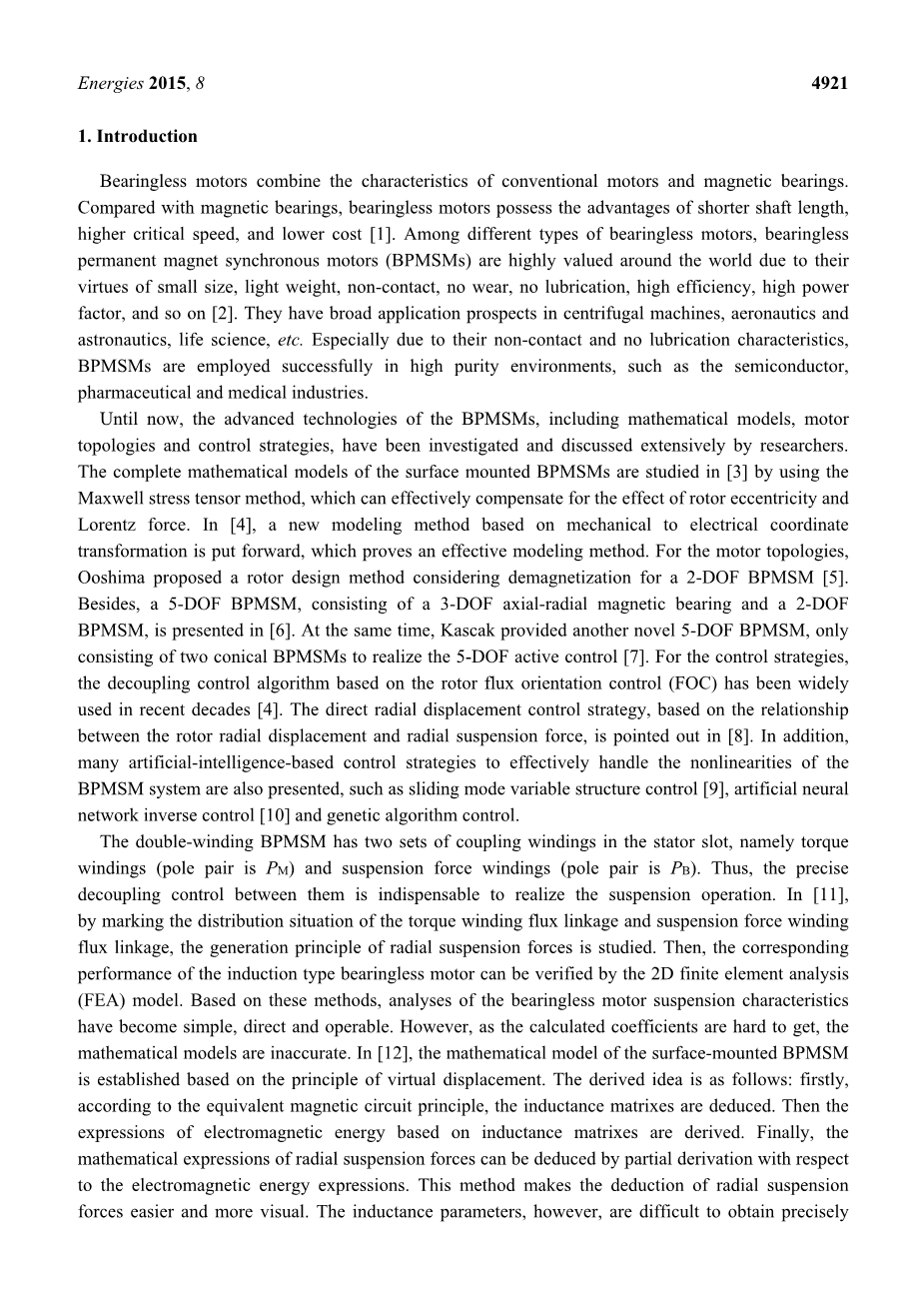
本文将基于载流等效绕组的分析方法定义为磁场等效电流分析方法。由转矩绕组气隙磁场产生的等效绕组定义为等效转矩绕组,由悬浮力绕组气隙磁场产生的等效绕组定义为等效悬浮绕组。此外,在场分布的基础上,许多结构形式可以由等效的扭矩绕组和等效的悬浮绕组组成。其中,增强因子和软化因子是两种关键的结构形式,如图2所示。绕组的上层对应于等效的悬浮力绕组,而下层绕组对应于等效的扭矩绕组。强化因子和软化因子由两组等效绕组形成,它们的中心线重叠。通过增强因子可以产生增强的合成气隙磁场,并且可以形成最大磁动势(MMF)。通过软化因子可以产生减小的合成气隙磁场,并且可以产生最小的磁动势(MMF)。如果两组等效绕组的中心线不再重叠,但在空间中存在夹杂关系,则绕组之间的磁场叠加效应与增强因子和软化因子相同。然后,将这些结构形式定义为部分增强因子和部分软化因子。
图2.由两组绕组形成的基本电流结构。(a),(b),(e)和(g)是强化因子。(c),(d),(f)和(h)是软化因子。
2.2. BPMSM的径向悬浮力产生原理
图3显示了表贴式BPMSM的定子配置和2D FEA模型。为了容易定向和启动,通常将扭矩绕组的A相绕组轴线与悬浮力绕组的轴线对齐。悬浮力绕组嵌入定子槽的外层,相序排列为→ →, = 2.扭矩绕组嵌入定子槽的内层,相序排列→→, = 1.旋转坐标中2-4极BPMSM的电机结构图如图4所示。由于永磁体气隙磁场的极对数与扭矩绕组相同,它们的合成磁场可以类似地被认为是扭矩绕组中电流的乘积[13]。基于传统分析方法和对的2-4极BPMSM的电机结构和工作原理与磁场等效电流分析方法分别如图4a,b所示。绕组NM代表等效的转矩绕组,绕组NB代表等效的悬浮绕组。然后在下面比较径向悬浮力产生的原理。
图3.无轴永磁同步电机(BPMSM)的结构图。(a)定子绕组分布。(b)有限元分析模型。
图4. 2-4极BPMSM的结构和工作原理图。
(a) 基于传统的分析方法。(b)基于磁场等效电流分析方法。
图4a说明了基于BPMSM的传统方法的原理[14,15]。对称的2极激励磁通由转矩绕组的d轴分量产生。当提供悬浮力绕组电流时,在气隙中产生对称的4极磁通。扭矩绕组通量和扭矩绕组通量的方向在气隙1中是相的,因此,所得到的气隙磁通密度增加。在气隙3中,它们的磁通方向相反,因此产生的气隙磁通密度减小。然后,根据麦克斯韦应力张量法,产生径向悬浮力F并指向正x轴。可以利用负电流产生x轴上的反向径向悬浮力。此外,通过在悬浮绕组中提供悬浮电流,可以产生y轴上的垂直径向悬浮力F.简而言之,径向悬浮力的方向受到4极悬浮力绕组电流相位的影响。
图4b描述了基于所提出的磁场等效电流分析方法的原理。在气隙1中,形成增强因子,并且在气隙3的位置处形成软化因子。复合MMF的方向是正x轴。因此,产生径向悬浮力F,其沿正x轴方向。该方法的分析结果与传统方法的分析结果一致。以相同的方式,如果等效悬浮力绕组沿逆时针方向旋转90°电角度,则产生正y轴的垂直径向悬浮力F。负x轴的径向悬浮力F可以通过沿逆时针方向旋转 180°电角度来产生。总之,径向悬浮旋转方向与等效悬浮绕组旋转方向有关,旋转角速度是等效悬浮绕组的倍,如[16]所示。2-4极BPMSM的原理描述也适用于其他极对组合物和各种类型的无轴电动机。
3. BPMSM产生稳定径向悬浮力的分析
基于磁场等效电流分析方法,可以推导出在一定方向上产生稳定径向悬浮力的必要条件。在该部分中,逆时针旋转方向被定义为旋转正方向。假设扭矩绕组气隙磁场以机械角速度在正方向上旋转。然后,为了在一定方向上获得稳定的径向悬浮力,径向悬浮力的绝对角速度应设定为0rad / s,其方向应固定。以扭矩绕组气隙磁场为基准,径向悬浮力的相对角速度为-。悬浮力绕组气隙磁场的相对角速度omega;可以得到[17]:
悬浮力绕组气隙磁场的绝对角速度可写为:
同样,当转矩绕组气隙磁场的角速度为-,即沿负方向旋转时,悬浮力绕组气隙磁场的绝对角速度可表示为.
因此,产生稳定的径向悬浮力的必要条件是悬浮力绕组气隙磁场的角速度应该是转矩绕组气隙磁场的倍,并且它们的方向应保持相同。换句话说,悬浮力绕组气隙磁场和转矩气隙绕组磁场具有相同的旋转电角速度和旋转方向:
通过磁场等效电流分析方法验证必要条件如下:相对运动分析情况如图5和6所示。其中,大尺寸和小尺寸的绕组分别代表等效的悬浮绕组和等效的扭矩绕组。
如果= 1(即= 2,= 1),当等效转矩绕组在正方向上旋转pi;/2 rad机械角时,根据必要条件,等效悬浮绕组必须在相同方向上旋转==/4rad机械角,如图5b所示。在alpha;= 0rad处存在增强因子,在alpha;=pi;rad处存在软化因子。由此,朝向0rad的方向产生径向悬浮力。在这种情况下,等效悬浮绕组的旋转电角度=2pi;/4=pi;/2rad与等效扭矩绕组的旋转电角度= 1·pi;/ 2 =pi;/ 2rad相同。当等效扭矩绕组在正方向上旋转pi;rad机械角时,等效悬浮绕组必须在正方向上旋转==pi;/2rad机械角,如图5c所示。在alpha;= 0rad处还存在增强因子,在alpha;=pi;rad处存在软化因子,因此径向悬浮力的方向保持为0rad。
等效悬浮力绕组的旋转电角度= 2·pi;/ 2 =pi;rad等于等效扭矩绕组的旋转电角度= 1·pi;=pi;rad。在图5d中,当等效转矩绕组在正方向上旋转3pi;/ 2rad机械角时,可以得到相同的结论。因此,当 = 1时,为了产生稳定且可靠的径向悬浮力,等效悬浮力绕组的旋转电角度等于等效扭矩绕组的旋转电角度。此外,等效悬浮绕组的旋转方向与等效扭矩绕组的旋转方向相同,反之亦然。
图5.单向稳定径向悬浮力的示意图(PB = PM 1)。(a)初始状态。(b)等效扭矩绕组的旋转,机械角度为90°。(c)在正方向上旋转,机械角度为180°。(d)在机械角度270°的正方向旋转。
如果 =- 1(即= 1,= 2),当等效转矩绕组在正方向上旋转pi;/ 4弧度机械角时,等效悬浮绕组必须保持径向悬浮力静止在相同方向上旋转= =pi;/2机械角..如图6b所示。在相同方向上的2rad机械角以保持径向悬浮力在静止方向上。增强因子是alpha;= 0rad,软化因子是alpha;=pi;rad。因此,径向悬浮力指向0rad的方向。然后,等效悬浮力绕组的旋转电角度=1·pi;/ 2 =pi;/ 2rad等于等效扭矩绕组的旋转电角度= 2·pi;/ 2 =pi;rad。当等效扭矩绕组在正方向上旋转pi;/ 2弧度机械角时,等效悬浮力绕组必须在正方向上旋转pi;rad机械角,如图6c所示。等效悬浮绕组的旋转电角度= 1·pi;=pi;rad也等于等效扭矩绕组的旋转电角度= 2·pi;/ 2 =pi;rad。在图6(d)中,当等效扭矩绕组在正方向上旋转3pi;/ 4rad机械角时,可以得到相同的结论。因此,当时,结论与的条件一致。
图6.单向稳定径向悬浮力的示意图(PB = PM - 1)。(a)初始状态。(b)等效扭矩绕组的旋转,机械角度旋转45°。(c)正向旋转,机械角度旋转90°。(d)在135°的机械角度旋转下沿正方向旋转。
简而言之,转矩绕组气隙磁场PM·omega;M的电角速度与悬浮绕组气隙磁场PB·omega;B的电角速度完全一致。悬浮力绕组和扭矩绕组的当前频率可表示为:
因此,产生稳定可靠的径向悬浮力的必要条件是悬浮力绕组气隙磁场以PM / PB乘以扭矩的角速度omega;M在与扭矩绕组气隙磁场相同的方向上旋转。
4. BPMSM径向悬浮力的数学模型
4.1. BPMSM径向悬浮力分析模型
根据Maxwell的应力张量方法,如图5b所示的径向悬浮力矢量F可表示为:
mu;0为透气性,Bn 和Bt 分别为BPMSM的气隙磁通密度的径向和切向分量,A为定子内表面积,r为定子内径,l为电机长度,theta;是空间角。
仅考虑电流的基本分量,由永磁体和转矩绕组电流负载A1引起的气隙磁通密度B1和由悬浮绕组电流负载A2激励的气隙磁通密度B2可描述为:
而扭矩绕组和悬浮力绕组A1,A2的当前负载可表示如下:
其中:
,.
是没有转子偏心的等效气隙长度,hm是永磁体厚度,g是机械气隙
全文共15297字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1266]

