
英语原文共 16 页
行人与自动驾驶车辆之间的
相互影响:绿野仙踪实验
Ana Rodriacute;guez Palmeiroa, Sander van der Kintb, Luuk Vissersb, Haneen Faraha,Joost C.F. de Winterc, Marjan Hagenziekera,b
a代尔夫特理工大学运输与规划系,Stevinweg 1,2628 CN 代尔夫特,荷兰
bSWOV道路安全研究所,Bezuidenhoutseweg 62,2594 AW 海牙,荷兰
c代尔夫特理工大学生物力学工程系,Mekelweg 2,2628 CD 代尔夫特,荷兰
摘 要
自动驾驶车辆(AVs)未来将应用在公共道路上,这意味着传统车辆和自动驾驶车辆将共享城市空间。从现实生活环境中的行人的角度来看,目前对行人和自动驾驶车辆之间的相互作用知之甚少。行人可能不知道他们正在与哪种类型的车辆互动,可能导致行人的心理压力和改变行走道路的决定。例如,当自动车辆驾驶员不与行人进行眼神交流,而是执行非驾驶任务时,行人可能会表现出较高的压力和保守的横穿马路行为。行人也有可能认为自动驾驶车辆总是会礼让行人(导致临界间隙变短)。本研究旨在确定与AV相互作用时行人的交叉决定与传统车辆相互作用时的决定。我们在一个封闭的路段进行了一项研究,参与者(N = 24)遇到了一个“绿野仙踪”自动驾驶车辆和一个内部设计传统的车辆。在绿野仙踪设置中,驾驶员座位上坐着一个假的“司机”,而乘客则通过操纵杆驾驶车辆。研究了20种不同情景,关于车辆状况(传统车辆,驾驶员阅读报纸,在车顶上有“自动驾驶”标志的分
心驾驶员,在引擎盖和车门上有“自动驾驶”标志的分心驾驶员,细心的驾驶员),车辆行为(停止与不停止)和接近方向(左侧与右侧)。参与者以随机顺序经历了每个场景一次。这允许在第一次与自动驾驶车辆交互时评估参与者的行为(之前没有进行训练和实验)。实验后访谈显示,大约一半的参与者认为车辆(有时)是自动驾驶的。参与者的临界间隙(即低于该距离的参与者将不会尝试开始穿过马路)和自我报告的压力水平的测量显示车辆状况之间没有统计学上显着的差异。然而,实验后调查问卷的结果表明,大多数参与者确实感知到车辆外观的差异,并且据报道受到这些特征的影响。未来的研究可以采用更多精细的行为测量,如眼睛跟踪,以确定行人对自动驾驶车辆的反应。此外,我们建议检查自动驾驶车辆到行人动态通信的有效性,例如人造灯和手势。
关键词:行人;自动化车辆;道路安全;感知;可接受间隙。
目录
第1章 引言
1.1行人与自动车辆的混合交通
在欧洲,约26%的道路死亡与行人有关(世界卫生组织,2015年)。大多数死亡发生在行人试图在城市环境中横穿道路时(例如,欧盟委员会,2016年;SWOV,2010年)。
自动化车辆(AVs)可以通过用可靠的计算机替换易出错的驾驶员来降低这些事故率。然而,在未来几十年中,将出现传统车辆和自动驾驶车辆在道路上行驶的混合交通状况,从而导致安全方面的不确定性(Sivakamp;Schuettle,2015年)。除非建立完全隔离的车道,自动驾驶车辆还将与易受伤害的道路使用者(如行人和骑自行车的人)共享道路。在车辆投入使用前,应评估和保证行人安全。
目前,许多研究人员关注的是计算机算法的发展,这些算法能够使用AV上的摄像头检测行人(Ohn Baramp;Trivedi,2016年)。此外,还可以对自动驾驶车内部的驾驶员如何控制进行充分的研究,比如当行人进入道路或发生另一种即将发生的危险时(如De Winter、Stanton、Price和Mistry,2016;Gold、Damb_ck、Lorenz和Bengler,2013)。然而,对行人本身的研究也是至关重要的,因为行人可能会随着自动驾驶车辆的变化而改变他们的行为。
1.2 行人与自动驾驶车辆互动面临的挑战
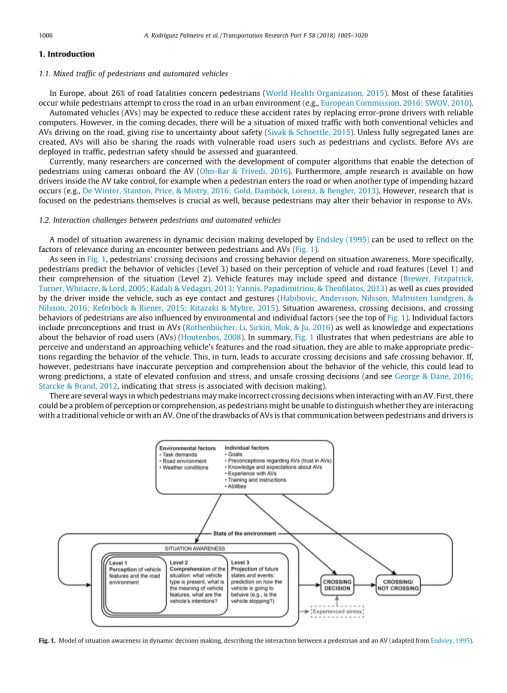
Endsley(1995)提出的动态决策中的态势感知模型可以用来反映行人与自动驾驶系统之间的相互作用因素(图1)。
如图1所示,行人的穿越决定和穿越行为取决于情境意识。更具体地说,行人根据他们对车辆和道路特征(等级1)的感知以及他们对情况的理解(等级2)来预测车辆的行为(等级3)。车辆功能可能包括速度和距离(Brewer,Fitzpatrick,Turner,Whitacre,&Lord,2005; Kadali&Vedagiri,2013; Yannis,Papadimitriou,&Theofilatos,2013)以及车内驾驶员提供的提示,例如眼神接触和手势(Habibovic,Andersson,Nilsson,Malmsten Lundgren,&Nilsson,2016;Keferbouml;ck&Riener,2015; Kitazaki&Myhre,2015)。行人的态势感知、横穿道路决策和横穿道路行为也受到环境和个人因素的影响(见图1顶部)。个人因素包括对自动驾驶车辆的偏见和信任(Rothenbuuml;cher,Li,Sirkin,Mok,&Ju,2016)以及关于道路使用者(自动驾驶车辆)行为的知识和期望(Houtenbos,2008)。总之,图1说明了当行人能够做到时通过感知和理解即将到来的车辆的特征和道路状况,他们能够对车辆的行为做出适当的预测。反过来,这会导致准确的横穿道路决策和安全的横穿道路行为。然而,如果行人对车辆的行为有不准确的理解和理解,这可能导致错误的预测,混乱和压力的加剧,以及不安全的横穿道路决定(参见George&Dane,2016; Starcke&Brand,2012 ,表明压力与决策有关)。
图1 描述行人和自动驾驶汽车之间的相互作用的动态决策中的情境意识模型(改编自Endsley,1995)。
在与自动驾驶汽车交互时,行人可以通过多种方式做出错误的横穿道路决定。首先,可能存在感知或理解的问题,因为行人可能无法区分他们是否与传统车辆或自动驾驶车辆相互作用。 自动驾驶车辆的一个缺点是行人和驾驶员之间的通信并不总是可行,因为自动驾驶车辆的驾驶员可能正在执行非驾驶任务,因此没有注意道路(Kitazaki&Myhre,2015;Rothenbuuml;cheret al.2016)。这意味着行人可能无法区分传统车辆中的分心驾驶员和执行非驾驶任务的自动驾驶车辆驾驶员,例如驾驶员正在阅读报纸。其次,由于缺乏涉及这些类型车辆的交通情况的先前经验,行人可能错误地放弃了对自动驾驶车辆的信任,或对自动驾驶车辆行为的错误预期。例如,如果行人认为接近的车辆正在自动驾驶,他们可能会接受短暂的间隙,因为他们认为自动驾驶车辆在所有情况下都会避让行人。相反,行人实际上可能会有很大的差距,因为他们不相信自动驾驶车辆的能力。
解决状态感知问题的一个可行方法是明确标识自动驾驶车辆的状态,例如通过一个外部标志“自动驾驶”说明(Hagenzieker等,2016年)。虽然这样的标志可以缓解感知和理解的问题,但也可能导致混淆,因为外部标志的存在并不能保证自动驾驶车辆在该特定时刻自动驾驶。
总之,未来的自动驾驶车辆可以明确可以识别(通过标志)或不可识别(但仍然包括分心驾驶员)。如图1所示,这两种情况都可能使行人感到困惑和压力,并可能导致行人改变横穿道路的决定。因此,分析自动驾驶车辆对行人接受间隙的影响,以及在决定过街时考虑到的主观感受的压力水平和视觉提示非常重要。
1.3 行人-自动驾驶车辆交互的研究现状
到目前为止,已经开展了一些关于易受伤害道路使用者与自动驾驶车辆之间交互的研究(例如,Blau,2015年;Citymobil2,2016年;Charisi、Habibovic、Andersson、Li和Evers,2017年;Clamann、Aubert和Cummings,2017年;Habibovic等人,2016年;Malmsten Lundgren等人,2017年;Rothenb_cher等人,2016年)。
Clamann等人(2017)通过实验研究了行人对绿野仙踪自动驾驶车辆的响应时间,该向导携带一个向前的标志,显示一条信息(例如,“走路”,“不走路”)。 这些作者得出结论,遗留的行为,例如间隙距离,对于决定是否过马路而不是自动驾驶车辆上显示的消息更为重要。Rothenbuuml;cher等人(2016)还使用了一个绿野仙踪的方法来评估行人在没有明显驾驶员的情况下与自动驾驶汽车进行交互时的行为。在自然驾驶研究中,作者使用汽车座椅服装隐藏驾驶员,并测量行人对车辆的反应行为。 结果显示,行人确实注意到汽车没有司机,但行人被发现“令人惊讶地能够在没有任何通信线索的情况下管理这种违反正常状态的行为”(p.801)。
Lagstrouml;m&Malmsten Lundgren(2015); (另见Malmsten Lundgren等人,2017年)进行了一项实地研究,评估了其中13名参与者在遇到传统车辆或绿野仙踪自动驾驶车辆时横穿道路的意图。为了创建这个绿野仙踪情景,作者在右侧转向的汽车中使用了一个虚拟方向盘,而真正的方向盘被隐藏起来,以便让行人看起来是左侧转向。测试了不同的车辆行为(停止,不停止)和不同的驾驶员行为(目光接触,电话,报纸,无司机)。作者发现,大多数行人遇到一个不专心的“驾驶员”或没有驾驶员时都表示不愿意穿过马路。相反,所有参与者都愿意在与司机进行目光接触时穿过马路。作者建议通过外部车辆显示器向行人提供信息可能是有益的。因此,作者还在挡风玻璃的上部展示了一个LED灯条,无论自动驾驶车辆是否处于自动驾驶模式,它都能向外界展示并礼让行人。类似的有由日产(Nissan)(LED显示屏显示“您先走”)和戴姆勒(Daimler)(将斑马线投射到路上)生产的自动驾驶汽车原型。
其他研究使用问卷调查或访谈来确定遇到自动驾驶车辆的弱势道路使用者的信息需求。 Blau(2015)使用在线调查问卷得出结论,与传统车辆交互时,参与者在与自动驾驶车辆交互时更喜欢隔离基础设施。Hagenzieker等人(2016)进行了问卷调查研究,参与者从骑车者的角度展示了传统车辆和具有不同外部标志(“自动驾驶”)的自动驾驶车辆的照片。作者发现自动驾驶车辆和传统车辆之间在参与者关于车辆是否已经注意到它们或将会停止它们的确定性方面没有统计学上的显着差异。Fridman等人(2017)利用通过众包招募的200名参与者进行了一项调查研究。受访者对安装在汽车前部的30辆车与行人之间的展示概念进行了评估。作者观察到,简单的指示(例如,绿色行人,绿色文本“行走”,红色文本“不要行走”)最能说明走路是否安全,而某些概念(例如箭头,圆圈等)更加模棱两可。根据一项访谈研究,Kitazaki和Myhre(2015年)提供了一份关于行人和自动驾驶车辆之间沟通的八项暂定建议清单。例如,他们建议自动驾驶车辆应在车身上识别自己,以便其他人能够形成对自动驾驶车辆的理解和信任。然而,目前,在现实环境中关于自动驾驶车辆与行人相互作用的研究还比较少。
1.4 研究目的
如上所述,行人和车辆之间的相互作用基于行人对车辆特征(例如,速度,距离)的解释以及与驾驶员的通信。此外,道路使用者的行为与他们期望其他道路使用者的行为方式相符。当在道路上引入自动驾驶车辆时,可能并不总是能够与驾驶员进行通信,并且行人可能对自动驾驶车辆的意图有不正确的期望。此外,传统和新型自动驾驶汽车可能共享道路,行人可能无法区分他们正在与哪种类型的车辆进行交互。这可能产生行人对车辆或交通状况的感知和理解的问题,导致对车辆行为,压力和行人横穿马路决定的变化的错误预测(参见图1)。因此,本研究的目的是分析当接近自动驾驶车辆时行人穿越道路决定的影响。具体来说,以下研究问题得到了解决:(1)行人的横穿道路决定是否在遇到自动驾驶车辆和传统车辆有所不同?(2)行人的横穿道路决定是否与AV的外部特征(#39;#39;自动驾驶#39;标志,司机的注意力状态)有关?
在真实的穿越道路环境中进行了一项实验,其中参与者(行人)遇到了一个接近的车辆,具有不同的乘员行为(注意力集中,注意力不集中,阅读报纸)和不同的标志(车顶标志#39;#39;自动驾驶#39;,引擎盖/车门标志#39;自动驾驶#39;,无标志)。 Hagenz
资料编号:[5907]

