英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
细菌趋化性通过模拟随机运动系数的验证模型
Zhiyu Wangy,MinJun Kimz,Gail Roseny
摘 要
为了表征的随机游走:大肠杆菌,生物学家研究的几个参数,如运动速度、运行时间、和随机运动系数。此前,生物学家发现 这些参数的概率分布可能会有所不同,取决于环境中的化学梯度的存在或不存在。例如,在一个梯度,E大肠杆菌细胞:展览 有偏随机游动。虽然有人建议,从偏态分布参数的偏置条件下,有矛盾的报告的实际分布,因为他们 通常来自细胞运动的观察。在本文中,我们认为问题相反。我们尝试假设的参数分布分别为公正和偏见的CAS 模拟随机游动。然后我们可以验证我们的趋化模型,通过模拟的随机动力系数,在无偏见和有偏见的环境下。
关键词 E:杆菌;趋化性;随机运动系数;随机行走;
大肠杆菌和趋化性
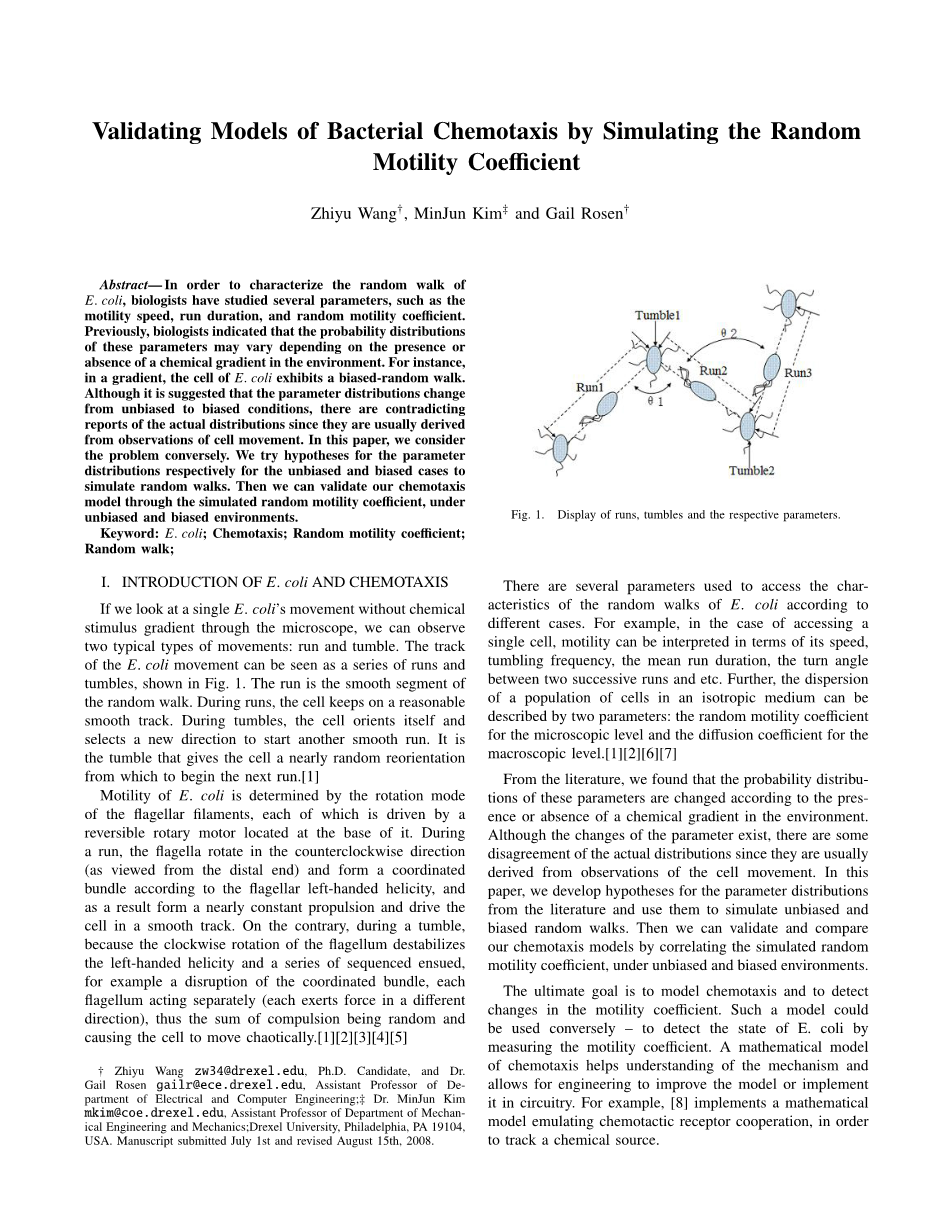
如果我们在显微镜下观察没有化学刺激梯度的大肠杆菌的运动,我们可以观察到两种典型的运动:跑和滚。大肠杆菌运动轨迹 n被视为一系列的运行和翻滚,如图1所示。运行是随机游动的光滑部分。在运行期间,电池保持在合理的平滑轨道上。在跌倒、细胞定位 并选择一个新的方向开始另一个平稳运行。正是这一下降给细胞一个几乎随机的重新定位,从下一步开始运行。[ 1 ]
大肠杆菌的运动是由鞭毛丝的旋转模式决定的,每一个鞭毛都由位于其底部的可逆旋转电机驱动。在运行过程中,鞭毛在 逆时针方向(从远端观看)并根据鞭毛左手螺旋形成一个协调的捆绑,从而形成一个几乎恒定的牵引和驱动 细胞在光滑的轨道。相反,在一个下跌,由于鞭毛的顺时针旋转破坏了左手螺旋和一系列测序接踵而至,例如二 的协调束sruption,每个鞭毛单独行动(每对一个不同方向的力),从而和强制被随机和引起细胞移动的混乱。[ 1 ] [ 2 [ 3 ] [ 4 ] [ 5 ]
图1.显示运行,跌倒和相应的参数。
有用于访问E的随机游动的特性的几个参数:杆菌根据不同情况。例如,在访问一个单细胞的情况下,运动可以解释 额定的速度,翻滚的频率方面,平均运行时间、两个连续运行等进一步之间的转角,一个细胞群在各向同性介质中的分散 是由两个参数描述:对于微观层面有效的随机运动系数和扩散系数为宏观层面。[ 1 ] [ 2 ] [ 6 ] [ 7 ]
从文献中,我们发现这些参数的概率分布是根据环境中的化学梯度压力基准或无变化。尽管这些变化 的参数存在,有一些分歧的实际分布,因为它们通常来自观察细胞的运动。在本文中,我们开发的假设 米分布的文献,并使用它们来模拟公正和偏见的随机游动。然后,我们可以验证和比较我们的趋化模型相关的模拟随机蠕动c OE的有效、公正和有偏见的环境下。
最终的目标是模型检测趋化和动力系数的变化。这种模型可以用相反的–通过测量动力系数检测大肠杆菌的状态。一 趋化的数学模型有助于理解的机制,并允许工程改善模型或实现它的电路。例如,[ 8 ]实现了一个数学模型 利用趋化受体合作,为了追踪化学源。
大肠杆菌活力参数
速度,V,被定义为细胞的线性速度跑或滚。在运行期间,我们可以考虑速度作为一个常数的原因,所有的长丝旋转相同的方向,可以看到总推进作为常数。
Vrunasymp;常数(1)
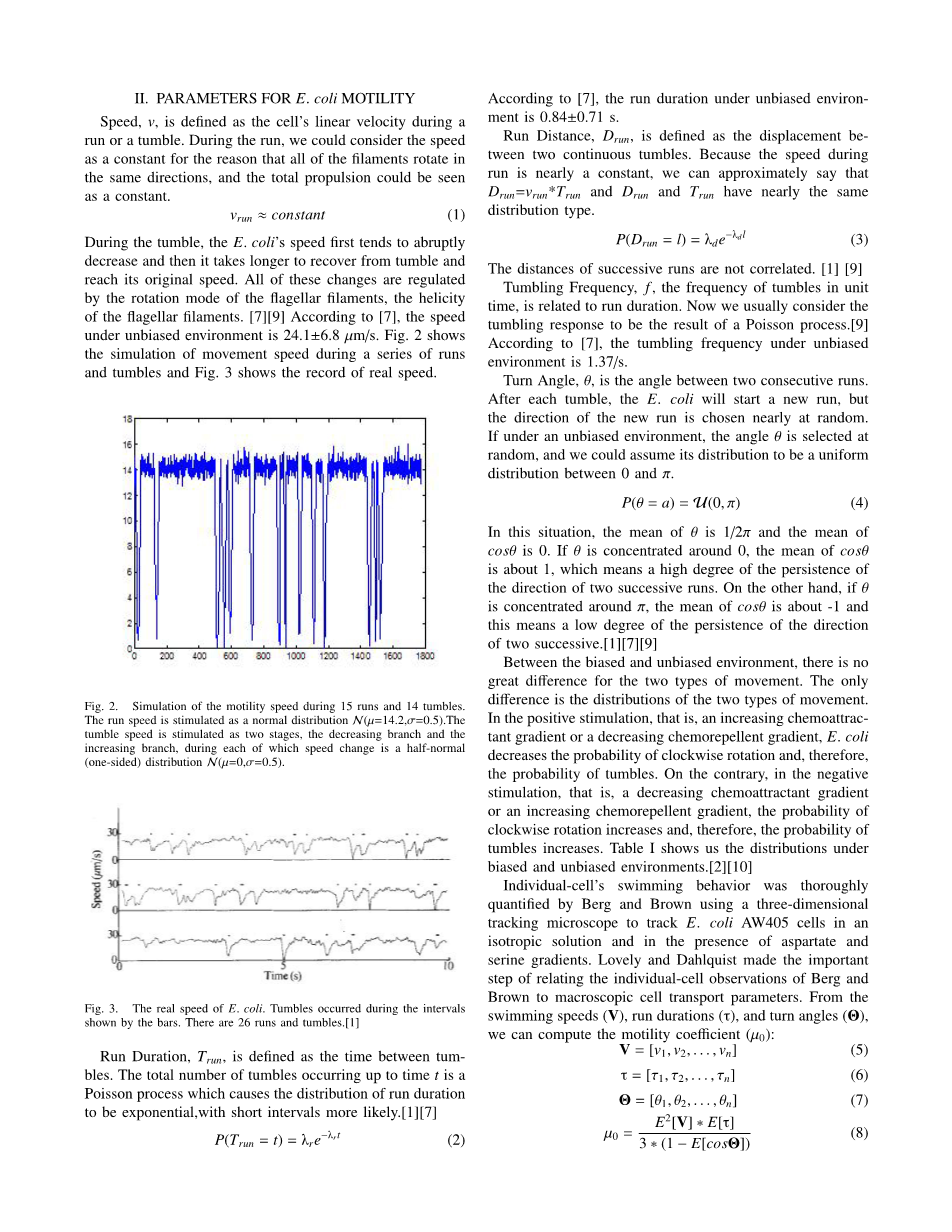
在翻滚过程中,大肠杆菌的速度首先趋于突然减少,然后需要更长的时间从跌倒恢复达到原来的速度。所有这些变化都受到调节鞭毛丝的旋转模式,螺旋性鞭毛丝的。[ 7 ] [ 9 ]根据[ 7 ],速度在无偏环境是6.8米/秒。图2显示一系列运行过程中运动速度的仿真和跌倒,图3显示了真正的速度记录。
图2.在15奔跑和14跌倒的运动速度仿真。增加分支,在每一个速度变化是半标准的滚速受两个阶段的影响,即下降的分支和运行速度刺激作为一个正常的分布n(= 14.2,
= 0.5)。(单侧)分布n(= 0,= 0.5)。
图3.大肠杆菌的实际速度,跌倒发生在间隔,有26个运行和跌倒。[ 1 ]
运行时间、趋势,定义为肿瘤的时间布莱斯。总人数的跌倒发生最多的时间是泊松过程,导致运行时间的分布指数,短间隔更有可能。[ 1 ] [ 7 ]
P(Trun = t) = [2]
根据[ 7 ],在无偏环境下的运行持续时间是0.84秒plusmn;0.71。跑的距离,Drun,定义为位移两连续翻滚吐温。因为速度在运行几乎是一个常数,我们可以大致说Vrun=Drun,vrun和Drun有几乎相同的分布型。
P(Drun = l) =
连续运行的距离不相关。[ 1 ] [ 9 ]翻滚的频率,F、单位跌倒的频率时间,与运行时间有关。现在我们通常考虑翻滚反应是泊松过程的结果[ 9 ]根据[ 7 ],翻滚频率下无偏环境是1.37/s。转角,是两个连续运行的角度。每次跌倒后,大肠杆菌会开始一个新的运行,但新运行的方向几乎随机选择。如果在一个公正的环境下,角度选择随机的,我们可以假定它的分布是均匀的分布在0和pi;。
在这种情况下,平均为1 / 2和平均余弦是0。如果集中在0左右,则均值为大约是1,这意味着高度的持久性两次连续运行的方向。另一方面,如果集中在周围,COS的平均值大约为1。这意味着低程度的坚持的方向连续[ 1 ] [ 7 ] [ 9 ]在有偏见和无偏见的环境之间,没有大的区别的两种运动。唯一的不同的是这两种运动的分布。在积极的刺激,即越来越重要的梯度或梯度降低排斥,E:大肠杆菌降低顺时针旋转的概率,因此,跌倒的概率。相反,在否定刺激,即减少趋化梯度或排斥的概率增加的梯度,顺时针旋转增加,因此,概率跌倒的增加。表我向大家展示了下面的分布偏见和无偏见的环境[ 2 ] [ 10 ]单个细胞的游泳行为彻底伯格和布朗用三维量化跟踪显微镜追踪:杆菌AW405细胞在各向同性溶液和天冬氨酸存在下丝氨酸梯度。可爱的Dahlquist作了重要的与Berg的个别细胞观察有关的步骤布朗对宏观细胞输运参数的影响。从游泳速度(v),运行持续时间(),和旋转角度(),我们可以计算出动力系数():
表1在文献中有偏和无偏环境下的参数分布
|
无偏见 |
有偏见 |
|
|
速度(m/s) |
在运行的大概常数[ 7 ] [ 11 |
精确值不在文献中,大约在运行期间常量[ 11 ] |
|
运行持续时间(s) |
指数分布, |
指数分布,预计将有更长的时间平均但没有数字* [ 2 ] |
|
运行距离(m) |
指数分布 |
指数分布* |
|
翻滚频率(tumbles/s), f |
泊松分布, P( =1.37)[1][7][11] |
泊松分布,预期有较大平均值,但没有文献报[ 1 ][ 11 ] |
|
转角(弧度) |
均匀假设 |
均匀假设未知[1] |
*分布不同的方向沿着或对化学刺激梯度。当细胞正在随着chemoattractor梯度或反对或 G chemorepellent梯度指数分布具有较大的值意味着,当细胞运动对提高chemoattractor梯度或沿降低排斥 梯度.
表2无偏环境下随机游动的仿真参数
|
运动距离 |
|
|
转角 |
|
|
转角方向 |
伯努利(上升= 1 / 2,下降= 1 / 2) |
在各向同性溶液(微观层面),随机运动系数描述了人口规模的随机运动性,[ ]是期望值,是通过平均计算。在宏观的L 级,随机运动性系数是一个扩散系数的运算等价。[ 9 ] [ 12 ] [ 13 ]
无偏和有偏模拟例子
在这个模拟中,我们只使用几个参数,因为一些参数是高度相关的,例如运行持续时间和翻滚频率。选择的值没有物理意义,因为我们只有想看趋势。无偏随机游动的模拟运行距离呈指数分布。转角之间均匀分布如下0(轴对称的初始方向)。当单元格选择方位角时 ,无论是向上或向下取决于与1 / 2以上的概率的概率伯努利随机变量下1 / 2的决定。表二显示的参数 模拟和图4显示的模拟结果,与真正的轨迹大肠杆菌随机游走图5。
图4.无偏环境下大肠杆菌随机游动的模拟。有26次,跌倒在这图和两个连续运行之间的角度为1 / 2sin分布W 我在0和。的出发点是(0,0)。
图5.Z轴的画面从一个细胞的电子轨道三立体图:杆菌AW405(趋化性野生型)沿X、Y、Z轴看。艾德勒的运动性介质中的细胞被跟踪,在49.78k 29.5秒,和X,Y和Z的输出进行采样12.6次/秒。有26个运行和跌倒。[ 1 ]
n种如大肠杆菌,有正向刺激的趋势(趋化因子梯度增加)或减少排斥梯度)减少顺时针旋转的概率,因此,跌倒的概率。另一方面,消极刺激的趋势(12月1日) 日益趋化梯度或梯度)增加这个概率增加排斥。我们可以得出结论,在这种情况下,在“正确”的方向运行延长,和 E运行在“错误”的方向缩短。结果是一个随机游走的细菌细胞,偏向于趋化或远离排斥。[ 2 ]
跑的距离是指数分布的,但一个是“正确”的轨道有较大的值均值为1,其他为“错误”的轨道与一个较小的值是1。转角如下 具体分布在0和(对初始方向的轴对称)。当单元格选择一个方位角,决定是否是向上或向下取决于 一个伯努利随机变量的概率为1 / 2和向下的概率也为1 / 2。运行距离分布取决于大肠杆菌的方向上的“权利”或“W” “轨道”(转角的累积角)。表三显示的参数模拟图III-B显示仿真结果。
表3有偏环境下随机游动的仿真参数
|
沿刺激梯度运行距离 |
|
|
跑的距离对刺激梯度 |
|
|
转角 |
|
|
转角方向 |
伯努利(上升= 1 / 2,下降= 1 / 2) |
图6.偏置环境下大肠杆菌随机游动的模拟。在图500的运行和连续运行之间的角度为1 / 2sin分布在0 和。沿y轴的正方向增加正的刺激浓度。的出发点是(0,0)
表4无偏环境下随机游动的仿真参数n是正态分布,E是指数分布,[ a,b ]是均匀分布。
|
运行速度 |
|
|
运行时间 |
|
|
滚筒转速变化 |
片面 |
|
转角 |
|
表5偏置环境下随机运动系数的仿真参数
|
运行速度 |
|
|
沿着chemoattractor梯时间 |
|
|
运行时间对chemoattractor梯度 |
|
|
滚筒转速变化 |
片面 |
|
转角 |
|
|
转角方向 |
伯努利(上升= 1 / 2,下降= 1 / 2) |
随机运动系数E C仿真:大肠杆菌的公正和有偏见的环境下运行持续时间呈指数分布。由于无偏行走过程中的速度可以假定为常数,运行时间间隔也是指数分布。选出的 运行过程中Y速度服从正态分布,相对标准偏差较小;在翻滚过程中,运动速度的变化遵循均匀分布。转弯角度 低点1 / 2sin分布之间的0和(轴对称的初始方向)。在公正的情况下模拟的步骤是:(1)利用指数分布为运行时间产生一个随机数;(2)样品的运行时间的速度,利用正态分布 生成的运行速度,一系列的随机数;(3)使用1 / 2sin分布为转角产生一个随机数;(4)重复步骤(1)(2)(3);(5)计算随机运动COE CI 耳鼻喉。唯一的区别是公正和有偏见的情况下之间的指数分布:当方向的E大肠杆菌运动是在“正确”或“错误”的轨道,分布D 我不同,取决于转角。表四显示仿真图III-C显示仿真结果在公正的情况下的参数。表五和图III-C显示偏压的情况下。我们使用卡方拟合优度检验,找到这两种情况下的最佳分布。对于一个正态分布的数据的对数似然性能 证明,它是为公正的情况下,Lognormal分布的对数似然得分最低(公式9)和偏置的情况下得分最低的是伽玛分布(公式10)。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[484015],资料为PDF文档或Word文档,PDF文档可免费转换为Word

