
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于Arduino微控制器的移动机器人手势控制
Sofiane TCHOKETCH KEBIR1,2, Mounir BOUHEDDA1, Slimane MEKAOUI2, Mohamed GUESMI1 和 Abderrahim DOUAKH1.
1高级电子系统实验室(Laboratory of Advanced Electronic Systems,LSEA), Medacute; ea, Algeriaacute;大学
电子邮件: {tchoketchkebir.sofiane, bouhedda.mounir}@univ-medea.dz, {guesmi.med93 ,rahimguigui92}@gmail.com
2语音通信和信号处理实验室(Laboratory of Speech Communication and Signal Processing,LCPTS),USTHB, 阿尔及利亚.
电子邮件: {tksof, smekaoui}@yahoo.fr
摘要——这项工作的目的是用手势来控制移动机器人。为了实现这个目的,使用主要基于循环霍夫变换的算法来处理所获取的手部图像,以便定义所需的目标。因此,控制信号通过Wi-Fi通信来产生和发送,以使机器人能够遵循期望的路径。测试结果表明了所提出的方法的有效性。
术语索引——图像处理,循环霍夫变换,手势,目标识别,移动机器人,Arduino。
I. 介绍
在过去的这几年中,人机交互经历了显著的技术进步,这种新的技术在许多研究和应用的领域都提供了更多的有利条件。为了实现人和机器之间的交互,在十分有限的环境中控制移动机器人的高级自然的交互有三个主要的领域。
互动的第一种形式是人类用户推动机器人移动的直接物理交互,在这个领域中已有许多方法被发明。最近,关于脑-机器人接口(BRI)的研究一直是一个非常有趣的广阔领域。在[1]中提出了一种用BRI控制微控制器的方案。另一种基于运动图像的方法是由W.Song等人开发的。[2]通过对脑电波信号进行预处理和处理来探索活动测量,可以实现第一种形式。
第二种方式是基于手势来操纵和控制移动机器人,U.Rajkanna等人开发了一种低成本高效率的系统,该系统用手来控制移动机器人,可应用于许多应用中,例如持有扬声器来协助哑巴[3]。
在最后一种模式中,移动机器人通过虚拟3D线进行交互,在人类环境条件中进行控制,虚拟3D线由与机器人共存的机器人使用者在空中手写[4]。[5]中的作者提出通过Kinect传感器(3D相机)实现人类手势识别来实时操纵移动机器人。
本文提出了一种新的方法来实现目标检测和定位,以实时远程控制机器人移动。为实现此目的,需执行图像处理以提取位于获取的不同图像中的目标。此操作的结果用于通过基于Arduino微控制器和Arduino Wi-Fi-Shield的Wi-Fi通信为远处的机器人生成控制信号。
II. 推荐的方法。
A. 使用的材料
在本节中,我们将介绍所有必要组件的描述以实现我们的目标。
- 机器人: 移动机器人是能够在其环境中移动的设备或自动化机器。移动机器人可以是“自主的”(AMR - 自主移动机器人)。他们能够在不受控制的环境中导航。本作中使用的移动机器人如图1所示,它有两个带有齿轮的直流电机和两个用于旋转的球形轮子。
图1 所用的移动机器人
- MicrocontrollerArduinoUno: Arduino 是一个基于ATmega微控制器的开源原型平台[6],Arduino uno是最常用的板之一,详细描述见[7]。
|
IEEE 2016 |
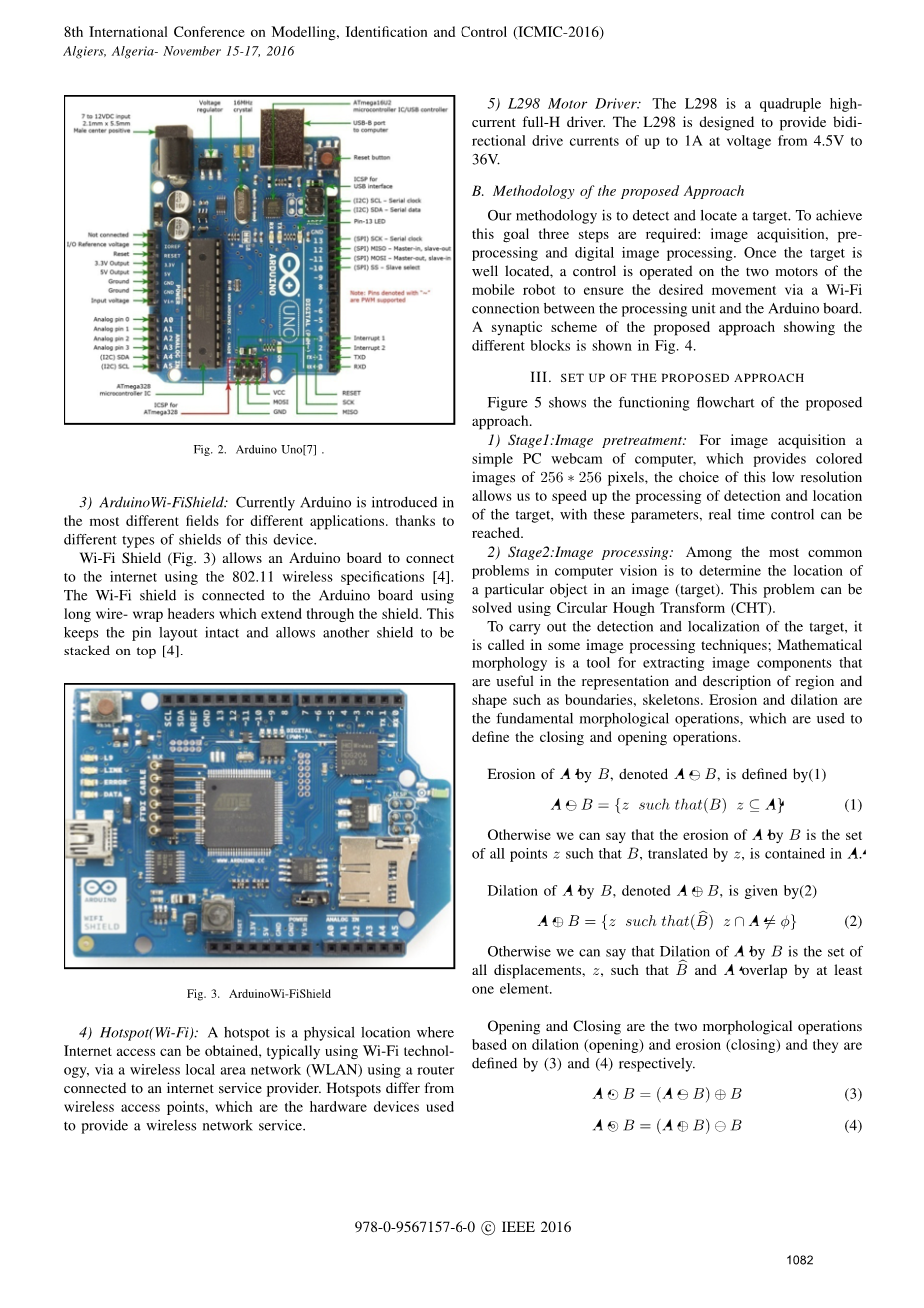
Arduino Uno板(图2)有14个数字输入/输出引脚,6个模拟输入,一个16Mhz的时钟,一个USB连接,一个电源插孔和一个复位按钮。通常,它包含支持微控制器所需的一切。
图2 Arduino Uno[7] .
- ArduinoWi-FiShield:目前Arduino已经被引入了大多数的不同领域的应用中。这要归功于此设备的不同类型的模块。
Wi-Fi 模块 (图3)允许Arduino板使用802.11无线规范连接到互联网[4]。Wi-Fi模块使用延伸穿过模块的长电线包头连接到Arduino板。 这将保持引脚布局完好,并允许在顶部堆叠另一个模块[4]。
图 3. Arduino Wi-Fi模块
- 热点(Wi-Fi): 热点是可以通过无线局域网(WLAN)使用连接到互联网服务提供商的路由器获得互联网访问的物理位置,典型地使用Wi-Fi技术。热点与无线接入点不同,后者是用于提供无线网络服务的硬件设备。
- L298 电动机驱动器: L298是一款四重高电流全H型驱动器。 L298设计用于在4.5V至36V的电压下提供高达1A的双向驱动电流。
B. 所提出方法的方法论
我们的方法是检测并找到目标。 要实现这一目标,需要三个步骤:图像采集,预处理和数字图像处理。 一旦目标位置合适,移动机器人的两个电机就会通过处理单元和Arduino板上的Wi-Fi连接运行一个控制(命令),以确保所需的移动。 所提出的方法的接合方案示出了不同的模块,如图4所示。
III. 建议方法的准备工作
图5显示了提出的方法的功能流程图
- 阶段1: 图像预处理: F为了图像采集,计算机的简单PC网络摄像机提供256 * 256像素的彩色图像,选择这种低分辨率可以加快目标的检测和定位处理速度,有了这些参数,可以达到实时控制。
- 阶段2: 图像处理: 计算机视觉中最常见的问题是确定图像中特定对象(目标)的位置。 这个问题可以通过使用循环霍夫变换(CHT)来解决。
为了执行目标的检测和定位,它被称为一些图像处理技术;数学形态学是一种提取图像组件的工具,这些组件可用于区域和形状的表示和描述,如边界,骨架等。侵蚀和扩张是基本的形态学操作,用于定义关闭和开放操作。
B对A造成的侵蚀,记为,由(1)式给出定义
(1)
否则,我们可以说,B对A的侵蚀是所有点z的集合,使得由z转化的B包含在A中。
由 B表示的A的膨胀, 记为A oplus; B,由(2)给出
A oplus; B = {z such that() z cap; A ne; } (2)
否则,我们可以说由B表示的A的膨胀是所有位移z的集合,使得和A重叠至少一个元素。
开放和闭合是基于膨胀(开放)和侵蚀(闭合)的两种形态学操作,它们分别由(3)和(4)定义。
(3)
(4)
图4 设计系统的概要
的循环对象。采用这种方法是因为它在存在噪声和遮挡以及可变照明的情况下具有很强的鲁棒性[8]。
循环目标可以由方程 (5)来定义。
r2 = (x minus; a)2 (y minus; b)2 (5)
其中a和b是中心的坐标,r是圆的半径。
CHT算法基于三个主要步骤:累加器阵列计算,中心估计和半径估计[8]。一旦圆形物体的半径和中心被识别出来,目标对应于具有相同中心的最小两个白色圆圈和两个黑色圆圈。这些是必须在获取的图像中检查以考虑目标的存在和位置的条件。
- 阶段3: 生成控制信号: 在该阶段中,生成控制信号以将机器人移动到对应于在阶段2中识别的目标的位置的位置。这些信号对应于机器人的位移和旋转角度。为了将机器人从位置A移动到位置B,最佳最短的运动轨迹会被计算出来。图6给出了一个例子。
图5. 推荐的方法的准备 图6. 确定最短路径的示例
机器人旋转角度 alpha; 用式 (6) 获得.
下一步是找到所有使用循环霍夫变换算法(CHT) (6)
轨迹的距离由式 (7).确定
(7)
4) 阶段4: 发送/接收控制信号: 最后,发出控制信号的最后一步。与直流电机的执行时间和旋转角度相对应的这些信号通过Wi-Fi通信发送如下:
http : //IP minus; address/Execution minus; Time/Rotation minus;
Angle
IV. 测试,结果和讨论
在本节中,将介绍已经实现的测试的结果。获取的图像定义了机器人手部移动区域。后者投影在地面上的确定表面上。图7给出了更多的说明
Fig. 7. 获取的图像及其在地面上的投影
因此,所获取的图像中的目标的每个移动对应于机器人在投影表面上的运动轨迹。对于256*256像素的图像对应2.3m lowast; 2.3m 的地面上的投影表面。机器人的特点是平均速度为0.83m.Sminus;1,转速为0.12rd.Sminus;1左右。
表1显示了从采集到的图像中识别出的目标的位置,以及投影面中相应的移动机器人位移的测量结果。
图8显示了从P0 到 P4 的目标路径,而图9显示了相应的移动机器人在地面上的轨迹。
表1显示出了机器人跟随投影表面上的目标,例如从位置P0到P1 ,目标进行了70个像素的移动,这对应于63cm的距离,并且真实位移为投影面上61厘米对应3.7厘米的误差。
表 I
目标检测和机器人跟踪
|
Acquired |
Coordin- |
Distance |
Distance |
Robot |
|
target |
ates |
Piminus;1Pi |
Piminus;1Pi |
displac- |
|
(Pi) |
(pixels) |
(cm) |
ement(cm) |
|
|
P0 |
(0,0) |
- |
- |
- |
|
P1 |
(53,46 ) |
70.0 |
63.0 |
61.0 |
|
P2 |
(-13,49) |
66.0 |
59.4 |
58.0 |
|
P3 |
(48,-21) |
93.0 |
83.7 |
80.0 |
|
P4 |
(-8,14) |
56.0 |
50.4 |
47.0 |
图8. 目标路径
图9. 移动机器人跟踪
测试结果表明,移动机器人实时跟踪与手部运动相对应的目标,并在投影空间中做出相同的相应手势。
V. 结论
在本文中,提出了一种简单的目标检测和定位方法来实时控制远程的机器人移动。最初,目标提取是通过将用数学形态学算子与CHT相混合的预处理和处理技术组合完成的。在这之后,控制信号被生成并通过Wi-Fi通信发送给
全文共13020字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13495],资料为PDF文档或Word文档,PDF文档可免费转换为Word

