英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
智能移动设备的单图像距离测量
Shangwen Chen, Xianyong Fang, Jianbing Shen, Senior Member, IEEE,
Linbo Wang, and Ling Shao, Senior Member, IEEE
摘要-现存的距离测量方法需要有多个图像和特殊的拍摄姿势或特殊的姿势来测量高度。我们提出一种基于图像的新方法,可以通过智能移动设备捕获的单个图像来测量各种类型的距离。嵌入式加速度计被用来确定设备的视图方向。像素可以被反投影到地面,所以这个高效的校准方法可以通过两个已知距离得以应用。然后将像素的距离按放大比例转换为用厘米作单位的参数化线性模型的实际距离。各种在图像中的距离可以被相应地计算。实验结果证明了所提出的方法的有效性。
术语索引-加速度计,距离测量,单一图像,智能移动设备
简介
距离测量在我们日常生活是非常常见的,例如测量地面上的距离或者物体的高度。当使用传统工具作为测量工具如尺子,激光[1]和深度照相机[2], [3]或不便或费用高,而基于图像距离测量的方法[4]–[11], [19], [24]只需要简单的拍摄,因此便宜且易于应用。在本论文中,我们专注于使用智能移动设备来通过单图像测量各种类型的距离。
基于立体声原理的测量方法依赖消费者的照相机来实现测距。
手稿在2016年4月28日收到;2016年7月2日修订;2016年9月15日发布。这项工作得到中国自然科学基金项目61301295和项目61502005,安徽省自然科学基金项目1608085QF129和项目1408085MF113的资助,是安徽省科学和技术发展重点项目1604d0802004,得到北京市教委联合建设项目专项资金资助。这篇论文由副主编L.Wang推荐。
S.Chen,X.Fang和L.Wang属教育部联合安徽大学计算机系智能计算与信号处理重点实验室,安徽合肥230601 (e-mail: chensw@ahu.edu.cn; fangxianyong@ahu.edu.cn; wanglb.2005@gmail.com)。
J.Shen属北京理工大学计算机学院智能信息技术北京实验室,北京100081 (e-mail: shenjianbing@bit.edu.cn)。
L.Shao属英国诺桑比亚大学泰恩河畔纽卡斯尔计算机科学与数字技术系,NE1 8ST, U.K(e-mail: ling.shao@ieee.org)。
本论文中一个或多个颜色数字版本可以在http://ieeexplore.ieee.org获得。
数字对象测量标识符10.1109 / TCYB.2016.2611599[12], [13], [25], [27], [28]。一些研究[14], [15]是通过固定两个或多个摄像头来校准位置捕抓图像。高姓等人员[16]通过改变相机的焦距以捕抓两张图像进行深度判定。Kim等人员[17]计算以安装在旋转镜前方的相机获得的反射图像a序列得出距离。这些基于多图像的方法需要固定照相机位置或明确知道照相机位置。Wu等人员[18]通过一个固定好的摄像机和被训练好的模糊神经网络来估计与前方车辆的距离。同时也介绍了使用特殊条件的单图像测量方法。其中一个使用两个同心圆或平行园来确定共面距离。Rahman等人员[21]提出一种基于人眼距离统计来实现估计人与摄像机距离的方法。上述所有方法都针对个人电脑平台,其中大部分只能测量深度或高度
最近,一些研究已经开始利用嵌入了摄像机和传感器的移动智能手机来进行距离测量。有一个例子是Holzmann和Hochgatterer [22]的深度知觉研究,捕获两个相关的图像来建立一个立体视觉系统并且利用内部传感器获得位置Laotrakunchai等人员 [23]用相似于Holzmann和Hochgatterer的方法同时测量深度和物体的尺寸。这些基于立体视觉的方法需要特殊的拍摄姿势来拍摄两张照片。Han and Wang [26]通过单图像平行基准和云的直接宽度来测量树的高度。显然,他们的方法没有充分利用智能移动手机的全部优点,例如可以采用加速计来确定设备的视图方向。大多数现在基于移动设备的研究仅专注于深度和高度的测量。我们提出一种新的基于单图像的方法,不需要现有方法中的基准测试来测量更多类型的距离。我们的方法只需要一个已知的距离,它可以时捕获到的场景中任意位置的任何已知长度,如果在场景中还没有已知的参考距离,可以提前轻易地准备好(例如使用任何现成的标尺类工具)。因此,该方法在实际应用中非常方便。提出的方法利用当今智能移动手机的标准配置的加速计来获取设备的试图方向,并且因此建立图像平面中的像素和其在地面上对应点之间的几何关系。像素中两点之间的距离通过放大比率参数化的线性模型转换为实际距离。可以获得三种类型的距离:地面距离,深度和高度。地面距离指两个用户指定点之间的距离。深度是摄像机三维空间中用户指定点为中心的光学距离。高度是指垂直于地面的线的两端的两个用户指定点的距离。其他类型的距离也可以根据着三种类型的距离来选择适当的地面像素来测量。我们的源代码在http://github.com/shenjianbing/distancemeasure可以找到。
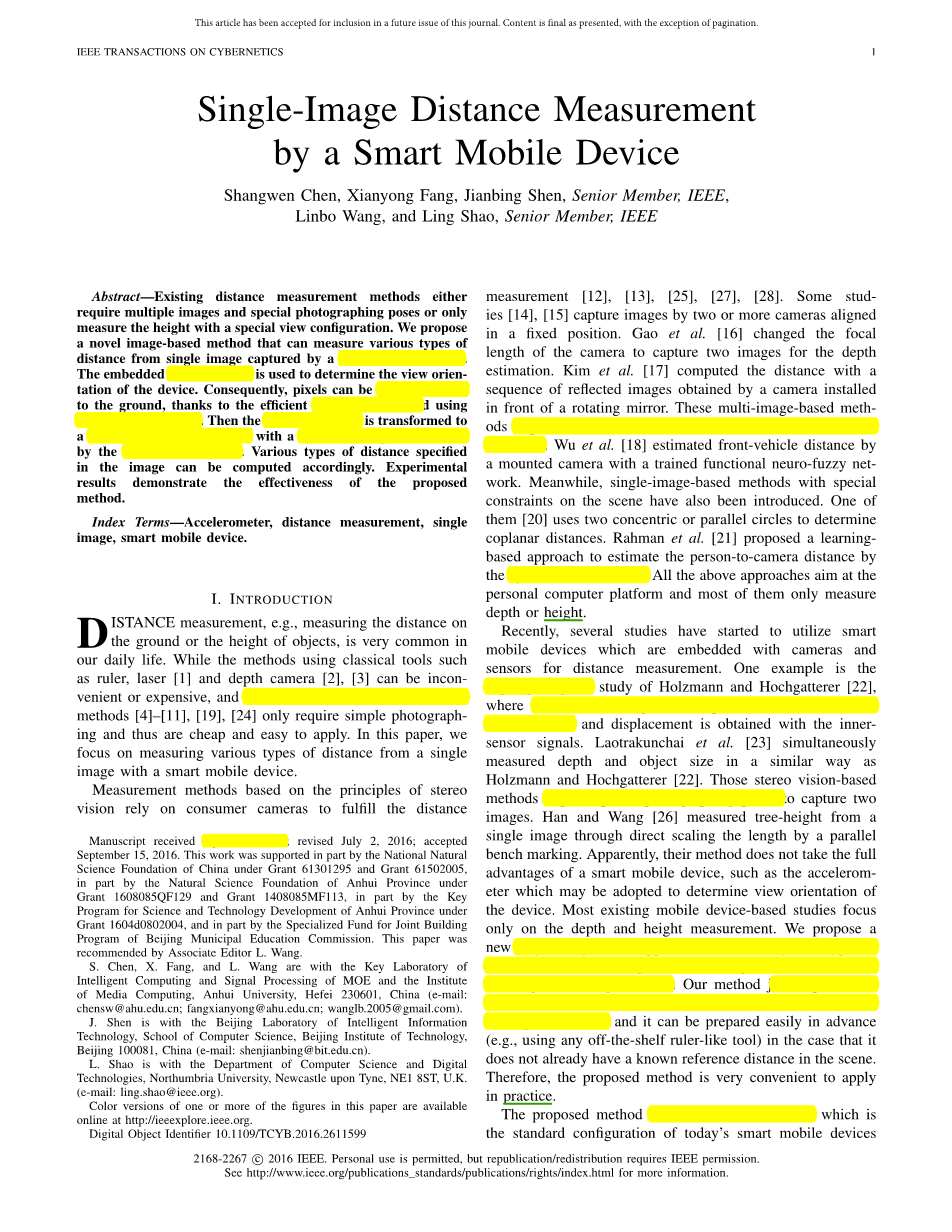
图1.我们提出的方法的流程。(a)由手持移动设备获得的加速度数据(b)摄像机以视图方向校准放(c)用比率测量不同类型的距离(例如深度,高度和地面距离)。
主要的贡献可以被总结如下。
- 它是第一款用智能移动设备基于单图像获取距离的方法,该方法利用嵌入的摄像机和加速度计来拍摄和恢复场景的几何图像。
- 提出了一种新的基于两个已知距离的校准方法,来获得准确的焦距,与现有的校准方法相比更加简单和高效。
- 现有的方法仅可以处理包括地面距离,深度和高度等各种距离的一种或两种。
建议的方法
我们的方法使用带摄像机和加速计的智能移动设备。摄相机为我们捕获场景图像。加速计提供重力加速度数据以获得设备的试图方向。该方向有助于将指定的图像像素投影到地面以方便实现距离测量。图1展示了该方法的流程。首先,在拍摄期间准备目标场景的图像和相应的重力加速度数据。数据经去噪处理来消除摄像机抖动以获得更高精确度。然后,校准摄像机来进行反投影操作并且线性模型计算表是像素距离和真是世界之间的放大比率。最后,不同类型的距离(如地面距离,深度和高度)可以通过反投影的比率来测量。
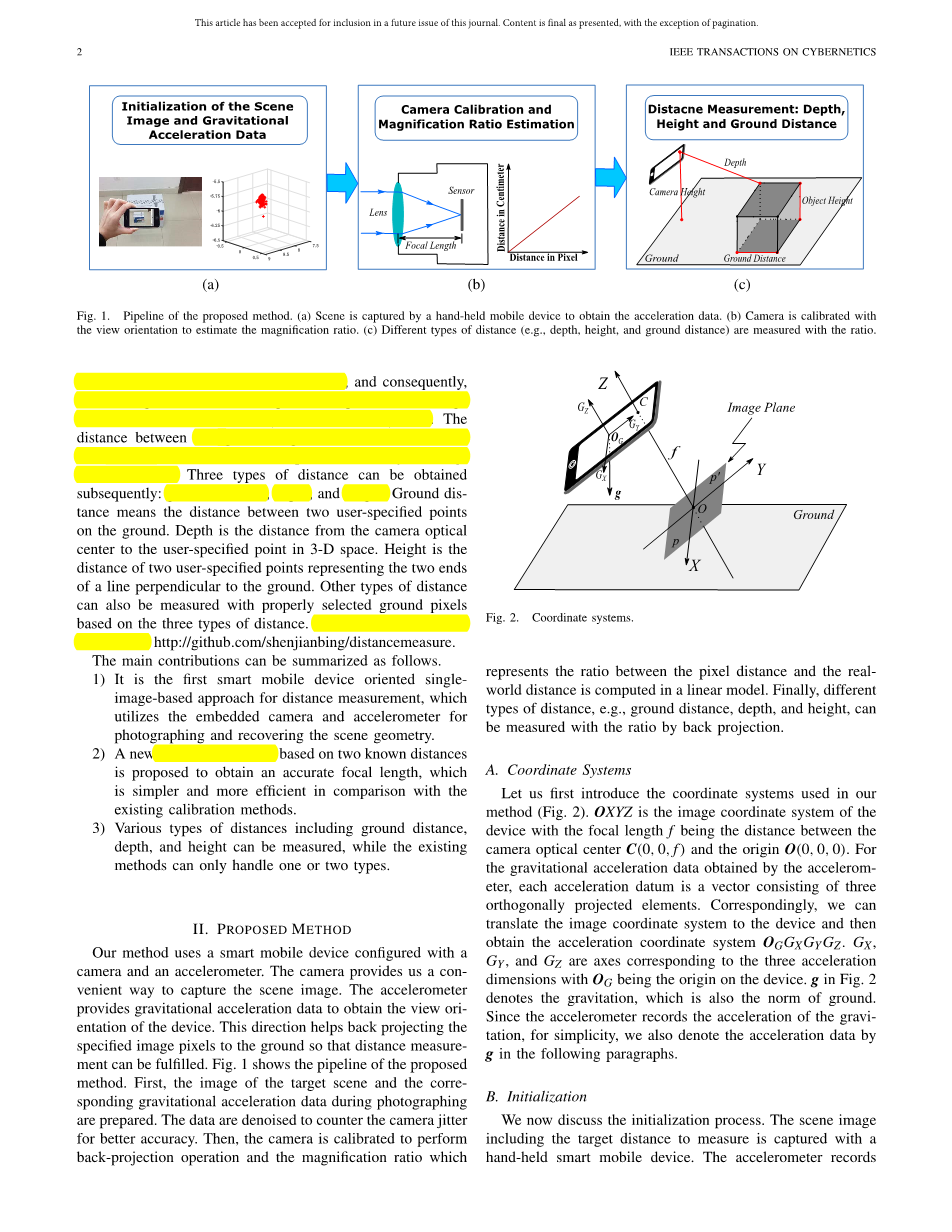
图2.坐标系
坐标系统
让我们先介绍一下我们方法中使用的坐标系(图2)。OXYZ是设备的图像坐标系,焦距f是摄像机光学中心C(0,0,f),与原点O(0,0,0)之间的距离。对于加速计获得的重力加速度数据,每个加速度数据是由三个正交投影元素组成的矢量。相应地,我们可以将图像坐标转换为设备以获得加速度坐标OGGXGYGZ。GXGYGZ是与三个加速度维度对应的轴,其中OG是设备上的原点。图2中的g表示引力,这是地球的参考数值。由于加速计记录了引力的加速度,为了简单起见,我们还在下面的段落中用g来表示加速度数值。
初始化
我们现在讨论初始化过程。用手持智能移动设备拍摄包括目标测量距离的场景图像。加速计在拍摄目标场景时记录每个空间位置处的重力加速度。如图2所示,每个加速度数据是一个三元向量,代表GX, GY, 和GZ轴中引力的投影。考虑到引力垂直作用于地面,我们可以得出设备的视图方向可以直接计算的结论。对于测量距离来说,这个方向是实现反投影所必需的,这有助于将像素距离映射到实际距离。因此,我们在拍摄场景图像时记录重力加速度。
但是由于不可避免的摄像机抖动,即便我们尽力保持设备静止,所记录的加速度数据非常不稳定,噪声很大。图3(a)展示了十个带噪声加速度案获数据从十个捕获到的记录里。每次捕捉持续一秒钟,并以不同的颜色描绘。在该图中,gx, gy, 和gz分别表示GX, GY, and GZ维度中每个数据的三个元素。每个组中的点表示图像捕获期间记录的加速度。在拍摄过程中,我们可以看到设备发生明显的晃动。显然,这种带噪声数据不能直接用于视图方向计算。
我们提出了一种加权平均方法去去传感器噪声数据。在这种方法中,对于记录的加速度数据组g(t), t isin; [tau; minus; (T/2), tau; (T/2)]在曝光时间T,可以通过采样时间T内加权计算去噪数据g。
其中(1)中的w(t)是由高斯函数表示的权重,sigma;是标准差。对于图3(a)中 的噪声数据,其中T=1s,sigma; = 0.2后,我们可以得到10个噪声集合的10个去噪加速度数据,分别展示在图3(b)可以看出,最初混乱的数据现在被压缩成一个单一的数据。设备的视觉方向可以通过这样的数据被轻易的计算出来,这基于计算放大率的背投影。
C.摄像机校准和放大率估算
放大比率将像素中的距离转换为以厘米为单位的实际距离。要计算放大比率e,用户在图像中指定的像素必须反投影到地面。计算背投影需要焦距f,因此我们首先校准摄像头以获取焦距。一旦我们知道了f,就可以用已知距离来计算e。
校准摄像机:通过地面上两个独特的已知距离来估计f。通常,由于大多数智能移动设备有固定的镜头,我们只需要校准一次f。因此,与传统的需要捕获多个图像的校准方法[29]相比,这个方法更易实现。
图3.重力加速度数据去噪的例子(a)不同的颜色显示十个加速度数据组在不同位置进行十次拍摄,每组拍摄时长为一秒。(b)十个数据集的去噪结果在(a)中,(b)中的结果(以点显示)可以放大看得更清晰。
假设图像平面是z=0(图2)。地面可以被描述为
其中d是地面方程的参数,并且不会影响测量结果,如第II-C2部分所述。p(px, py, 0)是对应地面点P(PX, PY, PZ)。
通过C和p直线Cp可以被定义为
P也在直线Cp上,因此
其中tp = [(-d - gzf )/(gxpx gypy - gzf ]。
等式(4)表面p和P通过变换矩阵H连接。它可以用来计算图像中两个像素之间的距离。例如,p(px, py, 0) 和 p(p x, p y, 0)背投影是点P(PX, PY, PZ)和 P(P X, P Y, P Z) ,它们的像素距离是
在(5)中s = d fgz是一个标量,与地面无关,F(p, p, f )是p, p,f的函数
其中
等式(5)包含两个未知量s和f。因此需要两个不同的距离来计算。更方便的方法是计算两个距离之间的比率,以消除包含d的s。左变量f可以被PPlsquo;和另一个距离QQ由q和qlsquo;计算
方程(7)是一个四次函数,每个多项式方程都可以用根来解决。我们提出了一个完善的基于预测的方法来估计f(7)的四个根。它基于CCD摄像机的焦距,视场和像平面之间的几何关系,如图4所示。
它们的关系可以被表示为
对于该成像模型,视场alpha;几乎是固定的,而焦距f改变,并且实际上嵌入式摄像机的水平视场alpha;近似为60°。
图4.CCD摄像机原理图。alpha;代表水平或垂直视角,h是图像的相应宽度或高度。
因此可以通过令alpha;=60°来计算f和fmacr;。
然后,选择四个根中最靠近f的那个作为最终估计的焦距。
- 计算放大率:假设两个像素的实际距离与其对应的像素距离的关系是线性的。对于两个像素p和plsquo;,可以通过具有参数的线性模型来估计它们的实际距离Lpp,和它们的像素距离PP,其中e是放大率
- 然而,没有关于真是距离和像素距离关系的信息,因此,需要通过(5)估计其以厘米为单位的像素距离来确定e。因此可以直接通过求解(10)得到e
其中代表已知实际距离,代表像素距离。
- 这种已知的距离可以是地面距离,高度或深度,使得它的像素距离可以通过(5)来计算。在真实的测量场景中,这些条件很容易满足。此外,如果一些相互的作用可以被用来计算像素距离,你们其他类型的距离也可以被应用到(11)(更多细节参见第IV节)。
尽管e和未知s一起被缩小s倍,但该比例不影响距离计算。也就是说,如果有其他对的点u和ulsquo;,它们的实际距离Luulsquo;可以通过(5),(10)和(11)计算:
显然,s对测量距离没有影响,并且包含在s中的d是没用的,正如我们之前声称的一样。
图5.不同类型距离的测量图。Lp1p2表示P1和 P2的地面距离。Hc和 Hp1p3表示摄像机和物体P1P3的高度。eCP1, eCP2,和eCP 3分别是p1, p2, 和 p3的深度。
D.距离计算
图5显示了要测量的三种类型的距离(地面距离,深度和高度)以及对应的符号。这三种距离是基本距离,可以被测量。
对于深度,要求底点位于地面上,例如是地面上物体底部的点。
全文共16505字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13894],资料为PDF文档或Word文档,PDF文档可免费转换为Word

