英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于生物启发速度调节的欠驱动AUV三维轨迹跟踪
周佳加a,叶丁绮a,赵俊鹏b,何东旭a
a哈尔滨工程大学,哈尔滨[5000],中国
b北京航天控制设备研究所,北京100039,中国
2016年10月4日收到;修订于2017年6月13日;公认于2017年8月19日
摘要
本文试图利用基于反推控制来解决欠驱动智能水下机器人(AUV)轨迹跟踪由于跟踪轨迹的不光滑导致的三维相关运动参数跳过问题。通过运动学概念推导出了三维动态速度调节控制器。该控制器利用生物启发模型和反推技术的浪涌和角速度误差。克服了反推跟踪控制中拐点时参数跳跃频繁出现的问题,提高了系统的鲁棒性。此外,该方法能有效地避免虚拟速度误差反推控制中的奇异性问题。利用李雅普诺夫稳定性理论证明了控制系统是一致最终有界的。仿真结果验证了所设计控制器的有效性和有效性,该控制器能实现欠定常干扰AUV的精确三维轨迹跟踪。
关键词:动态速度调节;仿生模型;反推;欠驱动AUV;三维轨迹跟踪
1.绪论
精确的三维轨迹的自主水下航行器(AUV)跟踪是一个重要的技术前提,为海洋资源开发、科学考察、海上防御(Thor I. Fossen,2011;Wan Kim,2015;于珊隼等,2016)。然而,无人水下机器人通常是欠驱动、高度耦合,非线性(kd,2015;Fossen。T等,2015)。本文所研究的AUV在摇摆和升沉方向上缺乏执行机构,可以归类为典型的欠驱动系统。由于外部干扰以及时间和空间的要求,AUV的三维轨迹跟踪更加复杂。
目前,已经提出了几种方法来跟踪欠驱动水下机器人,如滑模控制(Taha Elmokadem等,2016;哲平艳等人,2015;贾他明等人,2012A,b)、神经网络控制(Zhou et al.,2013),和反推技术(F.Y. Bi等人。,2010;贾他明等人,2012A,B;王红建et al.,2015;阿吉亚尔,A.和Joao,2007页;徐等人,2014)。这些控制方法各有其优点和局限性。Taha Elmokadem等人。(2016)将双曲函数与滑模控制相结合,求解了速度跳跃问题,实现了欠驱动AUV的平面轨迹跟踪。为了应对未知的模型参数和外界环境的干扰,哲平艳等人。(2015)提出了一种实现欠驱动车辆全局有限时间平面轨迹跟踪的方法。以上两种方法仍然局限在平面控制,没有考虑三维轨迹跟踪。实现三维轨迹跟踪控制。(2012a,b)用非线性迭代基于滑模低抖动的水上飞机和减少超调。然而,这些方法在从根本上解决与滑模控制相关的聊天问题上仍有困难。周佳加等人(2013)提出了三个神经网络控制器,用于估计未知参数和外部干扰,成功地对AUV所需的空间路径进行跟踪。然而,学习的神经网络确实是费时的。
为了解决反推技术的速度问题,F.Y. Bi等人(2010)简化传统反演方法使用虚拟速度误差的计算过程中,在一个水平面上进行跟踪控制机器人。贾鸣等(2012a,b)提出了一种自适应反推压制干扰洋流和实现三维路径跟踪控制方法。王红建等人(2015)提出了一种滤波反步法,简化了求取导数的过程,滤除了三维轨迹跟踪控制中的高频噪声。然而,在这些研究中,没有考虑随时间变化的轨迹对车速和姿态的影响。
为了克服模型参数的不确定性,阿吉亚尔,A.,Joao,P.(2007)提出了一种自适应切换控制策略,保证了系统误差在全球范围内有界。为了避免视线反步法中的奇异点发生,徐等人。(2014)定义多个虚拟速度误差变量来帮助实现三维轨迹跟踪。然而,它处理奇异性的方法会降低系统的控制性能,此外,还没有考虑到轨迹拐点问题。K.D.做(2015)设计了一种鲁棒自适应控制器,消除了外部干扰和成功的平面轨迹跟踪。西蒙。X. Yang和T. Hu(2002),Simon X. Yang等人。(2012)常中攀等人。(2013)针对移动机器人和水面舰艇,提出了一种与后退相结合的仿生模型。由于这些车辆的动力学模型比较简单,它们的控制器设计也相当容易实现。孙等人。(2014a)和Bing Sun等人(2014b)成功地应用于仿生模型完全驱动载人潜水器和无人水下航行器,分别。该方法只在动态模型中生成平滑滤波信号,不考虑动态模型。
采用反推技术对欠驱动AUV进行三维轨迹跟踪控制。本文的其余部分组织如下。第2节描述了AUV建模和坐标转换中存在的问题。本文提出了三种假设:综合生物启发模型和三种仿生模型,以支持三维轨迹跟踪的控制对象。第3节的发展轨迹与三维欠驱动AUV采用Lyapunov稳定性理论和反演技术调速控制器跟踪。第4节证明了在常外部扰动下控制系统是一致最终有界的。第5节给出了仿真过程和所得结果的讨论。最后,对三维轨迹跟踪方案进行了总结,总结了其优点。
2.问题描述
在本部分中,首先建立了欠驱动AUV的三维运动学和动力学模型。还进行了地球固定坐标系与物体固定坐标系之间的转换。接着,讨论了与三维轨迹跟踪控制有关的问题。介绍了用于调节速度误差的仿生模型。
2.1欠驱动AUV建模与坐标变换
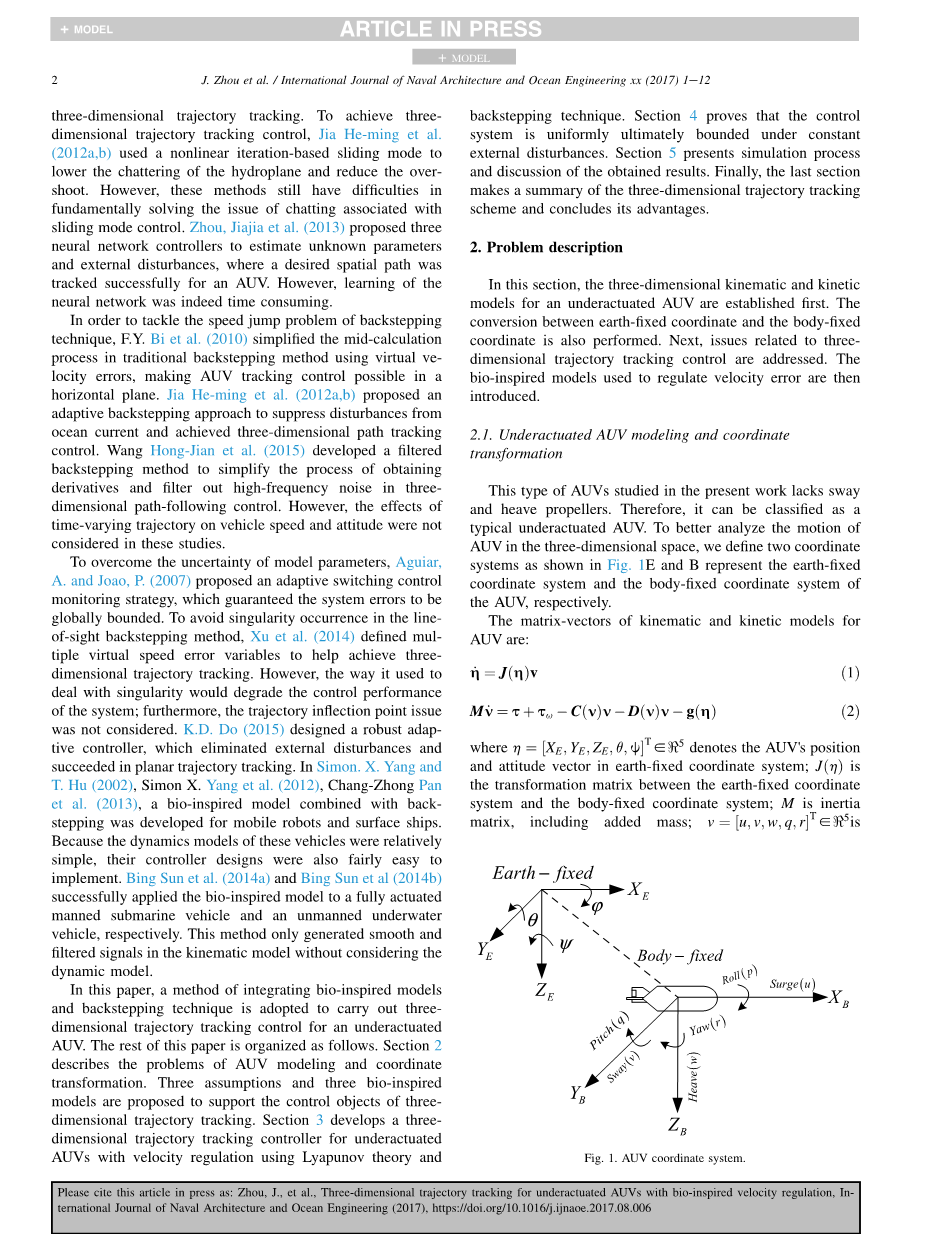
这种类型的水下机器人的研究在目前的工作中缺乏荡和垂荡桨。因此,它可以被归类为典型的欠驱动AUV。为了更好地分析在三维空间机器人的运动,我们定义了两种坐标系如图1所示E和B分别代表地球固定坐标系和体固定水下机器人的坐标系。
水下机器人运动学和动力学模型的矩阵向量:
(1)
(2)
其中代表AUV在地球固定坐标系中的位置和姿态矢量;J(eta;)是地球固定坐标系与体固定坐标系之间的转换矩阵;M是惯性矩阵,包括附加质量;是在体固定坐标系中的速度矢量;C(v)是离心力和科里奥利条款的矩阵,包括附加质量产生的离心力和科里奥利转矩;D(v)是阻尼矩阵;g(eta;)是恢复力和扭转矩阵;是输入向量控制;是外部干扰向量,且
这里描述的欠驱动AUV满足如下条件:1)车辆的质量分布是均匀的;2)重心与浮心重合;3)轧辊运动和非线性流体力学参数高于牵引力可忽视。下面的五自由度模型建立起来
运动学:
(3)
动力学:
(4)
其中m表示装置的质量;是附加质量项;
是线性阻力的水动力系数;
是二次阻力的水动力系数;分别是水密度、重力、水下全排水量和初始稳定高度是外部恒定干扰分量。
所需的偏航角和俯仰角仅根据参考轨迹获得,其中
(5)
位置和姿态误差变量:
(6)
且
(7)
其中是在地球固定坐标系中的坐标和方向,是在体固定坐标系中的坐标和方向误差。
把方程(3)(5)代入方程(6)得到:
(8)
其中
我们现在为欠驱动的AUV作三个假设:
假设1:欠驱动AUV的速度和控制输入有界,即
是已知上界。
假设2:理想的轨道变量有界,且它们的衍生变量也有界,t gt; 0。
假设3:欠驱动AUV俯仰角。
2.2.控制对象
为了进一步描述,我们首先定义AUV的期望状态
(9)
AUV的实际状态:
(10)
考虑到方程(1)和(2),我们应该设计一个状态X(t)精确跟踪期望的状态的控制器:
(11)
2.3.生物启发模型
为了研究其发生在生物神经系统传输信号的过程,A. L. Hodgkin和A. F. Huxley(1952)提出了著名的神经细胞膜的电路模型(H-H模型)。模型中神经元的电压满足以下动力学方程:
(12)
其中Cm是膜电容;分别是Nernst电位,钠离子,和负离子膜电流;分别是中性通道,钠离子和钾离子电导。
S. Grossberg(1983)进一步发展了H-H模型。让方程(12)的系数如下:
然后,得到一个生物启发模型:
(13)
其中Xi表示膜电位(活性值)与数量的神经元;参数A,B和D分别表示膜电位的衰减率,和上、下神经兴奋;变量表示励磁和第i个神经元抑制输入。
在式(13)中,神经元席活动值在范围[-D,B]内变化。对于任何外部的兴奋性和抑制性输入,这种生物启发模型保证输出值在有界范围内。S. Grossberg(1988)已经严格证明模型的稳定性和生物输出有界的启发。当有兴奋性输入,神经元增加且自动获得控制项B—。如果<B,则允许神经元增加显著;如果gt; B,则变为负,造成神经元席达到上限B。另一方面,当抑制输入存在时,神经元达到下限-D。
鉴于仿生模型的特点,诸如少量计算,获得自我调整,和光滑边界后输出,本文设计了一个三维轨迹和速度调节的欠驱动AUV跟踪控制器。对反推方法族中虚拟速度误差控制的现有控制律进行了修正。在仿生模型中考虑了波速度误差和角速度误差。通过调节衰减率参数,上限和下限B、D的神经兴奋,不仅可以跳过在拐点被有效的抑制,也避免了在现有的虚拟速度控制技术的奇异性的问题。设计的三维欠驱动AUV轨迹跟踪控制系统具有恒定外部干扰的示意图如图2所示。
3.控制器的设计
基于Lyapunov稳定性理论和反演技术,一个为了调节欠驱动水下机器人速度的三维轨迹跟踪控制器被设计出来。
步骤1:选择一个Lyapunov 函数如下:
(14)
联立式(8),式(14)的导数可以得到
(15)
定义两个虚拟速度误差变量
(16)
为了使负,期望值u,alpha;和beta;的取值如下
(17)
其中是所有正常数。当初始条件太大时,它避免
了速度装置可以达到的速度。
考虑到不是真正的控制值,我们定义了三个误差变量
(18)
图2.提出的三维轨迹跟踪控制系统示意图
将式(16)—(18)代入式(15)得到
(19)
步骤2:考虑(14),我们选择一个李雅普诺夫候选函数
(20)
其衍生成为
(21)
结合式(16)和(17),且推导式(18)的两个方面从而得到
(22)
为了使负,并避免出现在使用虚拟速度误差虚拟控制律的分母和反推法(见附录式(47)),我们重新定义了期望值r和q如下
(23)
虽然徐建等人(2014)通过从分母去除消除虚拟控制律的奇异性问题。然而,他们的设计的控制器没有考虑它的稳定性情况恶化;的情形也不能被模拟。为了克服这一缺点,本文利用生物启发模型的特点对动态速度误差进行了调节。因此,在拐点处跳过问题可以更好地抑制。利用本文设计的控制器,可以避免奇异性,解决直角拐点跳跃问题,提高系统控制性能。仿真结果在附录中给出了出现在虚拟控制律的分母使用本文设计的控制器。这个过程也在附录,其中K4,K5是正的常数;考虑到不是真正的可控变量,定义误差变量
(24)
将式(22)—(24)代入式(21),方程可被重写为
(25)
其中
为了实现更好的控制反应,在下一步我们将冲击速度误差和角速度误差替换到仿生模型中,实现动态调节。
步骤3:考虑下面的李雅普诺夫函数
(26)
沿着式(23)和(24)计算式(26)的导数得到
(27)
其中
将浪涌速度误差,俯仰角速度误差,和偏航角速度分别代入仿生模型中,我们得到
(28)
其中(i=u,q,r,j=1,2,3);Su, Sq 和 Sr表示动力学模型的输出,分别定义为涌浪,俯仰角和偏航角速度误差;参数的Aj是一个非负常数表示动态速度误差输出无源衰减率;常数Bj 和Dj表示动态速度误差输出的上下限;
我们选择动态速度调节控制规律为
(29)
其中
全文共8240字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12597],资料为PDF文档或Word文档,PDF文档可免费转换为Word

