
英语原文共 11 页
利用研究CFD超大型船舶浅水航行稳定性
李尚敏a 洪春邦b
a.国立昆山大学海洋科学与生产学系,韩国全北54150
B.韩国船舶装备研究所全南区域司,韩国全南58457
1. 介绍
近年来,超大型集装箱的运营和建设18000 TEU及以上的船只数量一直在急剧增加。这样的船舶类型,作为现有的超大型油轮,预计将有困难。由于船体外形完整,航向稳定。当这么大船舶在港口、海峡、运河,不仅有因船只沉没而搁浅的危险而纵倾,也是机动特性变化所引起的船体水动力的波动,这可能导致在海上意外碰撞等事故。因此,对准确估计船舶航向稳定性和它的蹲伏是必要的,同样也为了保证船舶在浅海航行的安全水区域。
在水中估计船只可操作性的方法。在有约束条件的情况下,如在浅水或狭窄的水道中,包括采用经验公式和基于经验的方法表示“状态”。采用经验公式的方法主要是执行对细长船舶势能理论的解释。特定的限制使用该方法需要满足一定的条件。采用水箱试验分析方法需要较多的时间和成本。另一方面,CFD能够准确地估算出在受限水域中船舶所受的水动力,同时也能较好地计算出船舶所受的水动力。考虑非线性和粘性效应,操纵该方法可以获得船舶的隐私性,以及由水动力引起的船舶状态可以分析流体动力。结果和导数在评估机动性方面有很大的用途。
表2
KVLCC2和DTC阻力性能的网络依赖性测试
CFD(当前研究) CFD EFD
粗糙 中等 好
KVLCC2 Mesh 882137 2318138
Rt(N) 17.388 17.672 18.674 18.2
E(%D) 4.46 2.90 2.60
DTC Mesh 756332 1336101 2869708
Rt(N) 30.148 30.296 30.292 31.83
E(%D) 5.28 4.82 4.83
Eloot等人(2015)对其进行了一个转弯和Z字形实验,通过对KVLCC2进行模型实验和数值计算,以达到确定浅水区的操纵性能。然而,由于流量测量无法理解浅水区的水流特性,在以后执行CFD进行流量预测讨论它的必要性。
Toxopeus等人(2013)讨论与之相关的浅水效应与机动水动力,用实验数据对kvlcc2进行CFD计算。在这项研究中,测试了侧壁和自由表面的相关效应,以及由于船体运动的约束作用而产生的水动力,如比较了下沉和纵倾。分析结果的变化船尾流场变化也显示得很好。
Carrica等(2016)对其进行了实验,用CFD模拟研究了KCS在浅水条件下的z形机动性能显示出适合CFD验证的高质量数据。此外,还有一个网格。研究表明,在自推进条件下,EFD具有较高的CFD计算精度。
术语
符号描述
B 船宽
C 航向稳定性指数
Fn 傅汝德数
H 水深
L 船长
Irsquo;r 偏航阻尼
Irsquo;V 横荡阻尼
N 偏航力矩
rrsquo; 无量纲角速度
Re 雷诺数
T 型深
U 船速
Y 横荡力
Beta; 静态漂移角
表3
不同网格配置下KVLCC2的无量纲水动力和力矩
CFD EFD
粗糙847350 中等1332504 好2346336 Exp.
Ye 0.01731 0.01684 0.01667 0.0159
E(%D) 8.87 5.91 4.84
No 0.01029 0.01039 0.01042 0.0116
E(%D) 11.29 10.43 10.17
|
表1 KVLCC2与DTC的主要数据 |
||
|
KVLCC2 |
DTC |
|
|
LPP |
320.0 |
355.0 |
|
B |
58.0 |
51 |
|
T |
20.8 |
14.5 |
|
Delta; |
312622.0 |
173467.0 |
|
CB |
0.8098 |
0.6610 |
为了评估船舶的机动性能得到浅水和深水的水动力导数。He等人使用kvlcc2的rans代码(2016b),对于KCSCura Hochbaum和Uharek(2014年)执行转弯试验和曲折试验。结果表明,转弯圆在浅水比深水,同时保持航向性能在浅水中改善。
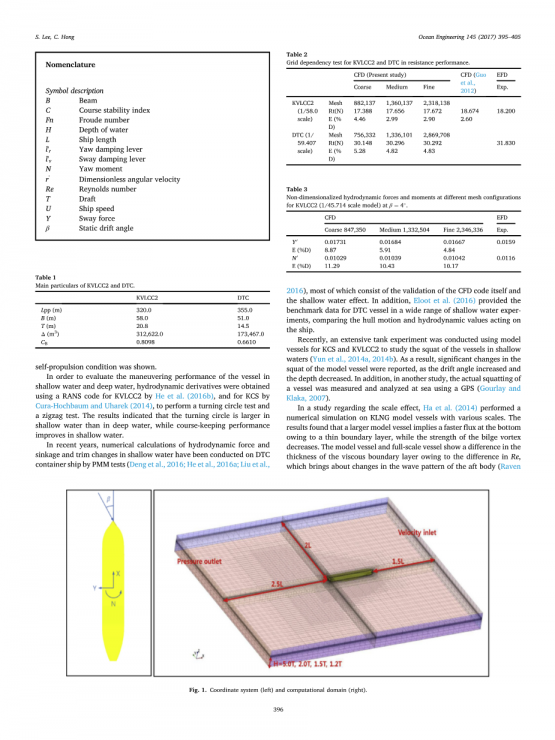
图1所示。坐标系(左)和计算域(右)。
近年来,水动力的数值计算和
在DTC上进行了浅水沉陷和纵倾的研究由PMM实验(Denget等人,2016;Heet等人,2016a;Liuet 等人,2016)组成,其中大部分包括CFD代码本身和的验证浅水效应。此外,Eloot等人(2016)提供了在大范围的浅水试验中,DTC船的基准数据比较了船体运动和作用于船体上的水动力值。
近年来,利用模型进行了大规模的水箱试验对KCS和KVLCC2船舶进行下蹲实验(Yun 等人, 2014a, 2014b)。因此,模型船的下蹲显著变化随着漂移角的增大和深度降低。此外,在另一项研究中,实际船的下蹲的利用GPS 在海上对一艘船舶进行了测量和分析(Gourlay和Klaka, 2007)。
Ha 等人(2014)在关于规模效应的研究中进行了不同尺度KLNG模型船舶的数值模拟。结果发现,模型容器越大,底部通量越快,由于边界层较薄,而舱底涡强度较大减少。模型船与实尺船的试验结果有一定的差异。由于Re值的不同,粘性边界层的厚度不同,这导致了舰尾体波型的变化(Ravenet 等人, 2008;杨等人,2010;Hochkirch和Mallol, 2013)。此外,Jin等(2016)证实了的线性水动力导数尺度效应对浪涌和
横摇力的影响很大,而偏力矩受弯矩的影响较小规模效应。
有许多关于模型的研究比较了阻力性能和机动性能,其中在受在不同的深度或侧壁的限制水域进行试验和数值分析。然而,这种情况并不多见,实际航行中了基于实际船舶的航行安全问题对船舶的下蹲、下沉现象进行了研究。迄今报道颇多,但对该课程稳定性的研究仍在继续,实际的船只很少进行。Nonaka等人(1986)进行了一项实验,以研究施加在容器上的水动力,以及容器周围的流体流动处于倾斜航行状态的船。因此,强非线性,包括三维涡的发射和非常复杂的流场。在浅水中,涡旋的排放因流场的变化。因此,有必要对非线性问题涡旋流等效应更为具体的研究。
本文采用CFD方法对其进行了数值计算研究了某船在浅水条件下的操纵导数,目的是为了分析各船型的航向稳定性,以评价其稳定性低速航行的超大型船舶的航行安全。本文对一艘实际尺寸的船舶进行了仿真,研究目标是一个非常大的KRISO原油运输船(KVLCC2)和杜伊斯堡测试用例(DTC)14000标箱集装箱船。
图2所示。KVLCC2在漂移运动时的横摇力(左)和偏航力矩(右)。
图3所示。在KVLCC2的纯偏航运动中,摇摆力(左)和偏航力矩(右)。
-
数值计算
- 计算方法在这项研究中,STAR-CCM ,商业CFD程序的基础上采用有限体积法进行了数值模拟。平均不可压缩流体的连续性和动量方程物体的力在笛卡尔坐标系中以张量符号表示,如fol-low (Ferziger and Peric, 2002):
(1)
表4
kvlcc2(1/45.714比例模型)y#39;和n#39;在beta;frac14;4?下的网格收敛性研究。
Yrsquo; Nrsquo;
phi;1 0.01667 0.01042
phi;2 0.01684 0.01039
phi;3 0.01731 0.01029
R 0.3617 0.3000
P 3.8754 4.5884
Phi;32ext 0.01657 0.01043
E32a 2.79% 0.96%
E32ext 1.63% 0.38%
GCI32med 1.98% 0.51%
图4所示。压力分布和流线在beta;KVLCC2frac14;15度(a) H / T 5.0frac14;, (b) H / Tfrac14;2.0, 1.5 (c) H / Tfrac14;, (d) H / Tfrac14;1.2。
(2)
是意味着粘性应力张量组件:
图5所示 KVLCC2在压力面(左)和吸力面(右)压力分布 beta;=15度(a) H / T= 5.0, (b) H / T=2.0, (c) H / T=1.5,(d) H / T=1.2。
(3)
rho;是密度,代表笛卡尔坐标系平均速度矢量,代表雷诺应力,代表粘性系数。
时间离散化采用一阶时间格式空间离散化采用了mo-的二阶对流格式方程。用简单的方法求速度-压力耦合。
图6 KVLCC2在rrsquo;=0.5 (a)H/T=5.0,(b)H/T=2.0,(c)H/T=1.5,(d)H/T=1.2的压力分布和流线
、
图7 KVLCC2在rrsquo;=0.5 (a)H/T=5.0,(b)H/T=2.0,(c)H/T=1.5,(d)H/T=1.2在压力侧(左)和吸力侧(右)压力分布
为了计算机动水动力,Toxopeau(2011)、Jin et al.(2016)、Sung and Park(2015)分析了RANS方程使用k-ε/ k-omega;SST湍流模型和雷诺应力模型
(RSM),结果令人满意。在这项研究中,湍流模型使用一个可实现的k-ε模型墙功能。
应用流体体积法(VOF)对自由表面进行了分析。范围在Delta;t=0.0025-0.005L/U选择数值计算。
应用STAR-CCM 提供的动态流体力学交互(DFBI)技术计算了船体的运动。在这项研究中,考虑了升沉运动和俯仰运动,使其与试验台匹配标记试验条件等(2013)。
图8所示。直流电动机在漂移运动时的横摇力(左)和偏航力矩(右)。
图9所示。DTC在纯偏航运动下的横摇力(左)和偏航力矩(右)。
2.2。计算域和网格
表1列出了全尺寸KVLCC2和DTC to的规格模拟水动力。在数值模拟中条件下,船舶速度设置为7节航速的KVLCC2船 (Fn=0.064)和航速13节(

