英语原文共 19 页
有限水深下船舶耐波性能的数值试验研究
姚超邦,孙晓帅,王伟,青叶
摘要
在浅水区域运行的船舶需要仔细观察有限水深效应(浅水效应)。在本研究中,在频域中开发了包括浅水效应和双体稳流效应的Rankine源方法。为了验证现有的数值方法,分别进行了两次实验,以测量船舶在头部正波中以前进速度前进的波浪载荷和自由运动。使用双体基流方法,简化m项的Neumann-Kelvin方法和具有双体m项的线性化自由表面边界条件,系统地将数值结果与实验和其他解进行比较。此外,深入研究了水深对附加质量和阻尼系数,波浪激励力,运动和非定常波浪模式的影响。发现有限深度效应是重要的,浅水中的不稳定波形依赖于Brard数和水深弗汝德数Fh。
1.前言
随着船舶在浅水区作业活动的增加,有限深度波浪作用下船舶运动的确定越来越受到人们的关注。在这样的水深中预测船舶耐波性能的知识对于海军建筑师,船东,港务局和港口设计师来说至关重要,特别是由于如今海运船队的规模扩大和大型浮动类型海上结构物的迅速发展。
受限制的水深有两种方式直接影响船舶运动(参见Yuan等人[1]):( 1)由于入射波的变化,船舶受到的波浪激振力与深水中的波浪激振力不同。; (2)船舶的水动力系数因接近海底而发生变化。针对这些问题,提出了许多解决方案,如条形理论方法(Tuck [2],Chu [3],Tasai等[4],Andersen [5],Perunovic等[6]),一个统一的理论(Kim [7])。由于切片理论方法具有计算时间短的优点,因此在实际中仍然得到了广泛的应用。然而,二维势流理论的局限性已经有了很好的证明,通常会高估共振频率中的耦合运动;研究人员提出,这种方法涵盖了切片法的解决方案中的三维效应,这在准确性上有了很大的提高。。
目前,三维面元法在时域和频域上都是基于满足线性化自由面条件或Rankine源的格林函数的有限深度效应,如Li[8]、Kim和Kim[9]、Oortmerssen[10]、Grant和Holboke[11]、Clauss等。[12]Fonseca等人。[13]袁等人。[1]熊等人。[14]和冯等人。[15]。由于面板方法与面板构成了一个完整的区域,因此,如果能对波浪进行适当的建模,它就可以形成任意的底层拓扑。由于考虑了三维流体的水动力效应,所以其预测精度优于二维方法。在这些方法中,脉动源格林函数方法满足零速线性化自由表面条件,并且对自由表面的速度影响忽略了振荡运动和平移运动之间的相互作用;在有限水深下,三维平移脉动源格林函数的描述和评估相对复杂(见Takagi[16])。
相反,Rankine源法更适合于分析船舶在有限水深条件下的耐波性能。自研究人员自赫斯和史密斯首次提出以来[17],深水条件下的Rankine源法已被许多人所采用。例如Sclavounos和Nakos[18],Kring[19],He等人。[20]Shao等人[21],Das和张[22,23],袁等人[24,25]。但仍存在一些值得关注的问题。首先,Rankine源方法需要更多的面板,这大大增加了计算的时间。然而,随着计算机技术和并行计算技术的发展,这样的计算时间在实际应用中是可以接受的。此外,Rankine源方法还需要一个合适的辐射边界条件来考虑水流中的散射波。针对此问题,现在有两种主流的方法对其进行建模。一种是由Nakos提出的所谓的上游辐射条件。在某些上游点处截断自由曲面,并在这些点施加一个静态边界条件,以保证自由曲面上游截断的一致性。另一种方法是将自由面上的源点移动到下游一定距离处。(Jensen等人)[27]Iwasita[28]和Elangovan等人。[29]。最近,Das和张[22,23]为边值问题提供了另一种解决方案,他考虑了Scatt的多普勒频移,修正了Sommerfeld辐射条件。截断无限流体区域的控制面上的波。这一新形式的辐射条件的有效性得到了袁等人的证实。[1,24,25].
本文提出了一种基于DAS和张辐射条件的考虑稳态流影响的Rankine源面元方法,用于分析在浅水中前进的船的运动、波浪载荷和非定常波型。通过实验数据与各种数值结果的比较,验证了该方法的有效性。另外,还进一步分析了水深对船舶水动力特性的影响。
2.数学公式
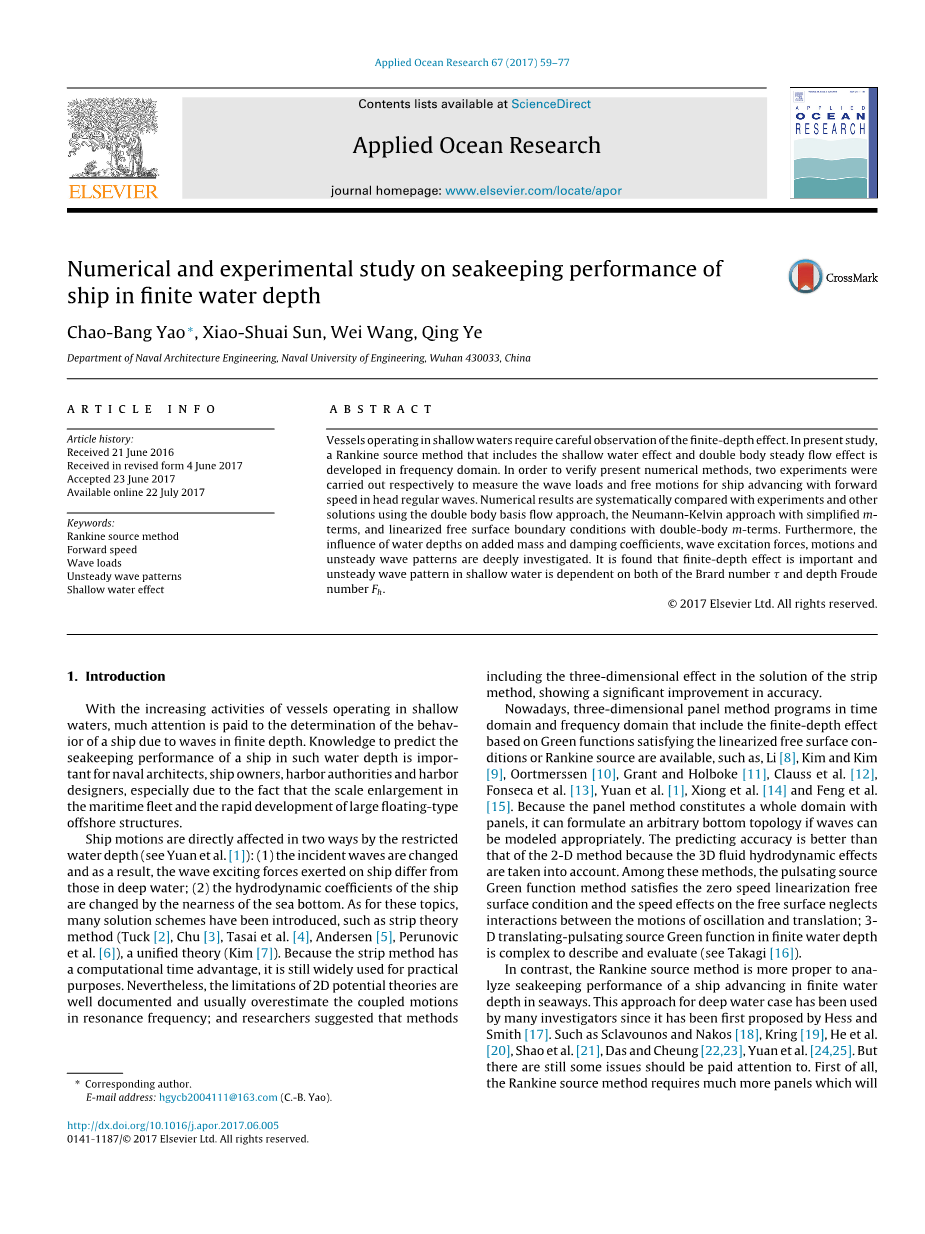
2.1坐标系
设置o-xyz为与船体一起运动的右侧笛卡尔坐标系,且在平均自由曲面上有xoy平面。原点位于静水平面上,x轴以船舶航速u0的方向为正。如图1所示,z轴以向上为正。
2.2.速度势
规则入射波方向取为beta;角,即正x轴与入射波方向之间的夹角。因此,180o表示迎浪。入射势Phi;0如下所示:
其中为入射波的波数;omega;0和zeta;为频率和振幅;omega;e为遭遇频率。假设流体为理想且恒定密度的不可压缩的流体。假设无旋流动贯穿始终,忽略表面张力效应。引入了速度势Phi;T(x,y,z,t),
其中,Phi;s和Phi;分别是稳态扰动势和非定常势。在一阶问题中,所有非定常运动都被假定为正弦波,且遭遇频率为omega;e,通过线性分解,非定常势Phi;可表示为如下,
其中,Phi;R和Phi;7是场中的耦合辐射和衍射势;Phi;R和Phi;7是它们中与时间无关的部分;
eta;j是船舶的第j次模态运动,j=1,...6,对应于纵荡、横荡、垂荡、横摇、纵摇和艏摇的顺序。phi;j是由船舶第j模态中的单位振幅引起的辐射速度势。
2.3.边界条件
2.3.1.定常势的边界条件
稳态势phi;s是均匀电流近场修正的重要因素,它对正向速度为U的非细长血管的波散射起着重要的作用。在边值问题中,它满足在z=0时静止水面上的零通量条件,在z=minus;h处满足海底的零通量条件,并在体表上满足如下条件:
其中,根据das和cheung的陈述,在这个所谓的双体流中,nabla;Phi;s迅速衰减,并成为远离船体的常数。在控制面设置两者为零,以完成边值问题。
2.3.2.非定常势的边界条件
非定常扰动势phi;j可由以下边值问题求解:
在流体领域
原状自由表面为Sf,nabla;1是水平梯度算子。
船体湿表面积为Sb,而所谓的m项被定义为:
散射波还必须满足海底运动学条件:
由于采用了Rankine源面元方法,因此需要在无穷远处施加适当的有效辐射条件来完成边值问题,而边值问题将在后一种情况下讨论。广义正规nj由(n1,n2,n3)=和(n4,n5,n6)=定义。是船体表面的内向单位法向量,是相对于船舶重心的位置矢量。
由于船舶的存在,忽略了稳态流的扰动,即众多等式的mj分量。式(11)和(12)可以简化为j=1-4,m5=u0n3和m6=minus;u0n2的mj=0,并将自由面条件简化为(Neumann-Kelvin线性化自由曲面条件),
2.4.辐射条件
DAS和张[22,23]在频域上发展了Rankine源公式的辐射条件,该条件解释了船前向散射波的多普勒频移。速度。目前,该方法已被采用。
图2显示了在正x方向上以恒定前进速度u0航行的船只散射波场的多普勒频移。船内的散射波随着时间的缩短而减慢。它们在上游繁殖,而在下游传播时,它们会拉长并加速繁殖。
当船只从B点移动到O点时,行驶时间应为t=BO/u0。在这段时间内,船沿BO产生散射波(第一次散射波应该是Aris)。e在B点)。这里的控制曲面定义为一个圆心点O和半径BO的圆。如果散射波只能到达点D,如图2所示,则不存在散射波。S达到DA弧,然后定义为SC2。相反,弧BD被定义为SC1,对其施加不同的辐射条件。从图2起,散射波的波向。S达到品脱D(x,y),在B处产生,以一个角度theta;旋转(如果没有前向速度,则波方向应沿OD方向旋转)。然后可以导出以下关系,
在等式(15)中,c是D处的散射波速,可表示为:
其中,omega;s是来自固定参考点的散射波的角频率,可以给出如下所示:
其中ks=D(x,y)处的局域波数,h是水深。
所有正常到控制表面的散射波必须外向,以避免反射。如果得到控制面上点的坐标,则可以通过迭代获得theta;和ks。公式(15)-(17)构成非线性系统。如果找不到解决方案,这些点必须位于控制面SC2上。否则,它们就在SC1上。辐射条件定义为t。不同的方程,
梳理等式(15)-(17)可导出下列方程,
其中lambda;s=2pi;/ks是局部波长,是无量纲局部波长,是深度Froude数,是无量纲局部波数和参数。
当x轴上无量纲局域波长ɑ为0或pi;时,,公式(20)变成:
可以找到方程(21)的数值解。解在ɑ=0或可定义为1,2,3,4(对应的无量纲局部波长为1,2,3,4),不同的水深弗汝德数如图3所示,
在fh=0(无限水深)时,可以找到四种解,这与Becker[30]和袁等人的结果是一致的[25]。在lt;0.25时,x轴上有四个波长:1和3 响应于环波系统,2和4对应于内外Kelvin扇波系统。在gt;0.25时,x轴只有两个波长;
在Fhgt;0(有限水深)时,方程的解数。(21)依赖于参数fh。当fhgt;1时,x轴上只有两个波长,即使→为0;也就是说,存在两个波长。没有散射波沿正X轴传播,当fhlt;1时,还可以找到四种解,但临界tau;(确定是否解的方程在alpha;=0可以得到)是根据fh变化的,随着Fh的增加,其体积变小。临界与fh的关系如图4所示。在第二区,x轴只存在两个波长.
在公式(22)中可以给出临界和fh的多项式拟合表达式。
2.5.波浪激振力和水动力系数
考虑到非稳态,忽略高阶项和静水压力,形成线性水动力压力方程,
rho;为水密度。
在确定了船舶平均润湿体表上任意点的速度势后,可以得到在j阶模态下的辐射力和矩。
用公式(24)表示的辐射力和矩。得到了附加质量系数Aij和阻尼系数Bij。
波激力和矩fwi可以通过下式计算:
2.6.耦合运动方程
基于刚体动力学,可以得到船舶在频域上的耦合运动。
其中Mij是船舶广义质量矩阵的元素。Cij是船舶6times;6恢复力系数矩阵的元素。关于质量矩阵和r的表达式的详细信息。建立力系数矩阵可以在袁等人中找到[24]。
然后,由这种形式的动态自由面条件求出波高,
3.数值方法
3.1边界积分方程
第2.3节中的边界条件定义了流体边界每一段的流动势、其正规导数或两者。在目前的研究中,身体表面,自由表面和控制冲浪。ACE被离散成若干个具有恒定源密度的四边形板。其中=(zeta;1,zeta;2,zeta;3)是边界上的位置向量。在=(x,y,z)处的势(在流体区域内或在边界表面)可以用,
其中,表示稳态速度势phi;s或非定常速度势phi;j。G(,)是通过镜像法得到的公式(6)和(13)中满足海底边界条件的简单格林函数。
当得到sigma;j时,点的速度势变成,
在公式(31)中,N是四边形的总面板数;Gij是影响系数,可以用DAI和Duan[31]列出的解析公式计算。
3.2去凝法
得到了稳态和非定常问题的数值解,满足了相应的自由面条件、体边界条件和控制面边界条件。在搭配点处调整。Sb、SC1和SC2的配置点与每个面板的几何中心一致。对于自由面边界(Sf),奇异性分布不存在t。O位于自由面本身,它也可以位于离自由面较近的距离上,只要配置点停留在自由表面上。在本研究中,建议采用与袁等人编写的程序[24]。上升距离设为Delta;zi=SQRT(Si),其中Si是第i面板的面积。
3.3自由面上势的m项和二阶导数的计算
m项的计算涉及到物体上双体势的二阶导数的计算。赵和法尔丁申[32]说明了直接数值EV的不足m项的退休金。Nakos和Sclavounos[33]提出了一种直接格林函数法的Stokes定理。本文采用积分法计算第二次导数。吴[34]提出的双体基流的ES,经Ch

