英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
第35届中国控制会议的会议记录
2016年7月27日—7月29日,中国成都
基于制动强度的电动汽车能量回收控制战略
宋国政 张艳琴
北京工业大学,北京100124
摘要:为了提高基于传统制动强度分配策略的电动汽车能量回收效率,会议提出了一个基于制动强度的控制战略。众所周知,当制动强度较低时,就要分析机械制动力和电力制动力的分配关系。因此,在会议中,将会解释如何提高基于最高效率制动力矩和欧洲经济委员会(ECE)路况法规,并处在不同制动强度下的控制效率以及该战略的适用条件。并且,一个电动汽车实物模型已经在全国经济发展委员会(NEDC)和联邦测试程序(FTP75)路况条件下由AVL-CRUISE软件建立出来。仿真结果显示:该被提议的策略可以显著提高制动能量利用效率并且能够保证制动的稳定性。
关键词:能量回收,制动强度,最高效率,制动力矩
- 介绍
当一个电动汽车反馈制动时,它的电动机将处在发电模式中,并且其制动能量会被送回电池。因此,当负力矩受到驱动轴驱动时,电动汽车将会减慢速度[1]。因为在这种情况下,车辆重心将向前移动,导致在前轴上有更多的制动力。因此,电动制动力能促使前轮驱动车辆的前轴制动[2]。传统的制动强度分配策略就是在机械制动中增加电力制动,在这种情况下,总的制动力总是等于电力制动和机械制动的合力。但是,这种控制策略会导致能量回收效率较低。因此,为了提高制动能量利用效率以及保证制动的稳定性,增加汽车前轴的电动机制动力矩的研究越来越受到重视。
国内外在此领域已经有了大量的研究。例如,sangtarash等人提出了三种不同的制动强度分配策略,它们分别是与反馈制动力类似的制动力分配策略、最大能量制动力分配策略和最佳制动性能的分配策略,但是以上三种分配策略都没有考虑到防滑煞车系统(ABS)对反馈制动系统的影响[3]。此外,张俊志等人提出了一种结合了防滑煞车系统(ABS)的燃气——电协作策略。但是,由于这种策略是基于传统制动的,能量回收效率有限[4]。孙俊等人也提出了一种协调了机电制动和防抱死制动系(ABS)的控制算法,但是这种算法并没有考虑到不同制动力的影响[5]。以上这些分配策略都存在着这样或那样的缺陷,都未能考虑到影响制动能量利用效率以及保证制动稳定性的所有因素,因此,现在急需提供一种比较完善的可以解决以上问题的分配策略。
因此,这篇论文提出了一种基于制动强度的电动汽车能量回收控制策略。该策略的基本原理是:当制动力较低时,由于前轴的整体制动力均来自电力制动力,电动机的发电效率将会达到最大;此外,当电力制动不能达到最大效率时,在总制动力满足欧洲经济委员会(ECE)路况条件之前,机械摩擦力将会参与该制动过程;并且随着制动力的持续增长,电力制动力会逐渐降低,机械制动力会大幅度提高,以便总制动力接近理想制动力。然而,在防抱死制动系(ABS)必须工作的紧急制动过程中,电动制动力将不再适用。因此,在这种制动过程中,只有机械制动力还处在工作状态下。
本篇文章的其余部分安排如下:电动机的性能将在第2.1节中进行说明;机械制动力和电力制动力在低制动强度条件下的分配将在第2.2节中得到解释;不同制动强度条件下的分配控制策略将在第2.3节中得以回答;而这一战略的局限性将在第2.4节中得到分析;最后,在CRUISE软件中建立的表明了该策略能提高制动能量利用率并保证制动稳定性的汽车模型和仿真结果将在第3节中得到分析。
2.分析和方法
2.1电动机的特性
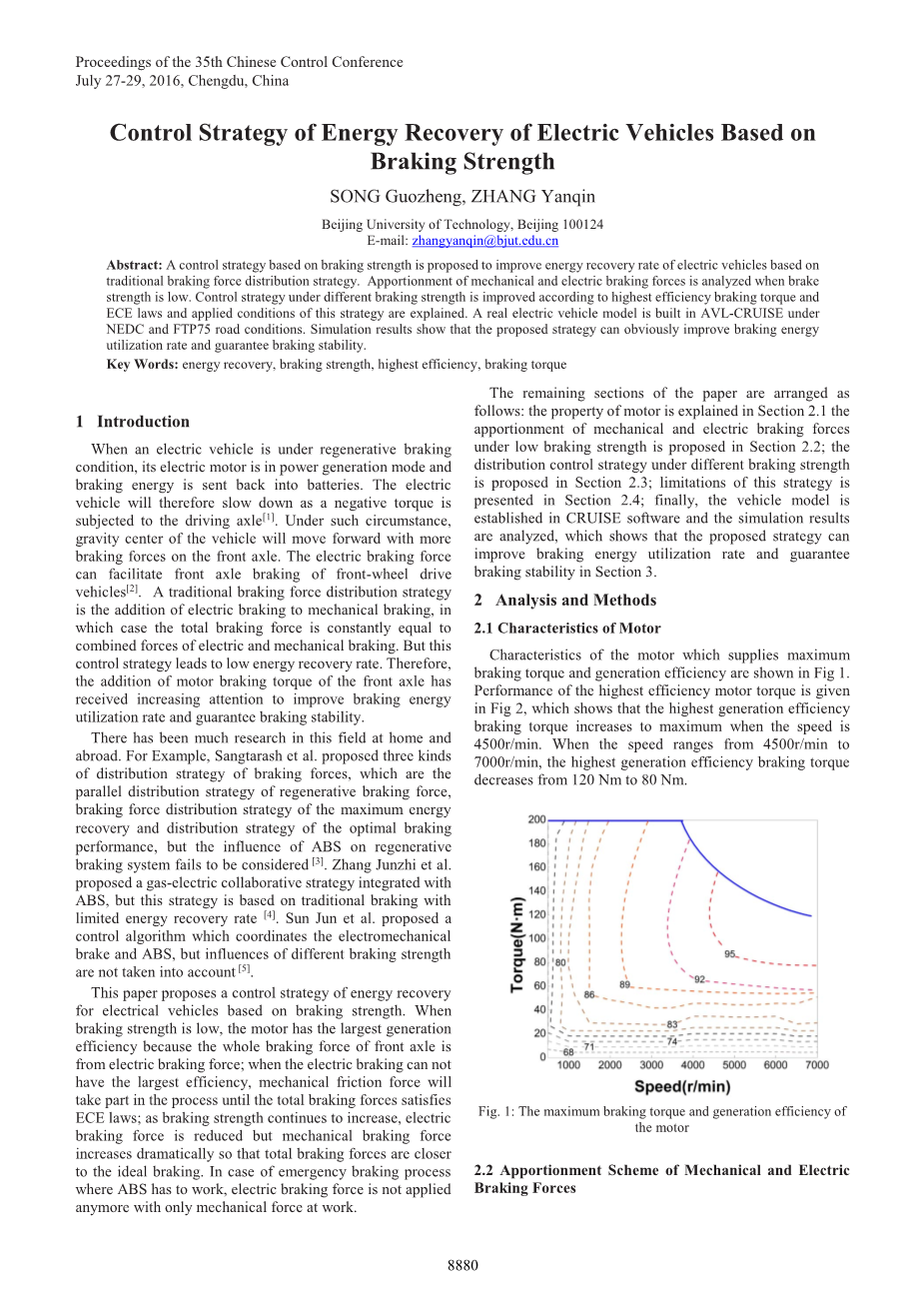
电动机的特性曲线图如图1所示,该特性图包含了最大制动力矩和发电效率关系。当转速达到4500r/min并且最高发电效率制动力矩增大到最大值时,其最高效率电机力矩的性能曲线如图2所示。由图2可知,当转速由4500r/min变化到7200r/min时,最高发电效率制动力矩将会由120N·m减少到80N·m。
图1电动机的最大制动力矩和发电效率关系图
图2:最高效率电机力矩的性能图
2.2机制制动力和电力制动力的分配方案
为了提高前轮驱动车辆的能量回收效率,对反馈制动力矩的理想分配方案进行了如下分析[6-7]。
当电动机的最大效率制动力矩大于要求时,前轴的制动力仅由电动机提供。当电动机的最大效率制动力矩小于要求时,电动机提供最大的反馈制动力矩,其余制动力矩由机械制动力矩补充。该算法的具体流程展示在图3,相关参数见表1。
表1:相关参数
|
参数定义 |
标志 |
|
直流电机速度 |
S_m |
|
最高效率制动力矩 |
T_mh |
|
前轴制动力矩要求 |
T_r |
|
前轴制动力矩的理想分布 |
T_If |
|
前轴制动力矩 |
T |
|
前轴摩擦制动力矩 |
T_f |
图3:机制制动力和电力制动力的分配方案
2.3控制策略的分配方法
根据汽车的工作原理中的公式1和2[8],我们得到了如图4所示的在前后轴之间理想的制动力公式:
Fu1 Fu2=G (1)
(2)
式中:Fu1 表示前轴制动力;Fu2表示后轴制动力;G表示车辆重量;a表示重心和前轴之间的距离;b表示重心与后轴之间的距离;L表示的是轴距;hg表示的时重心高度。
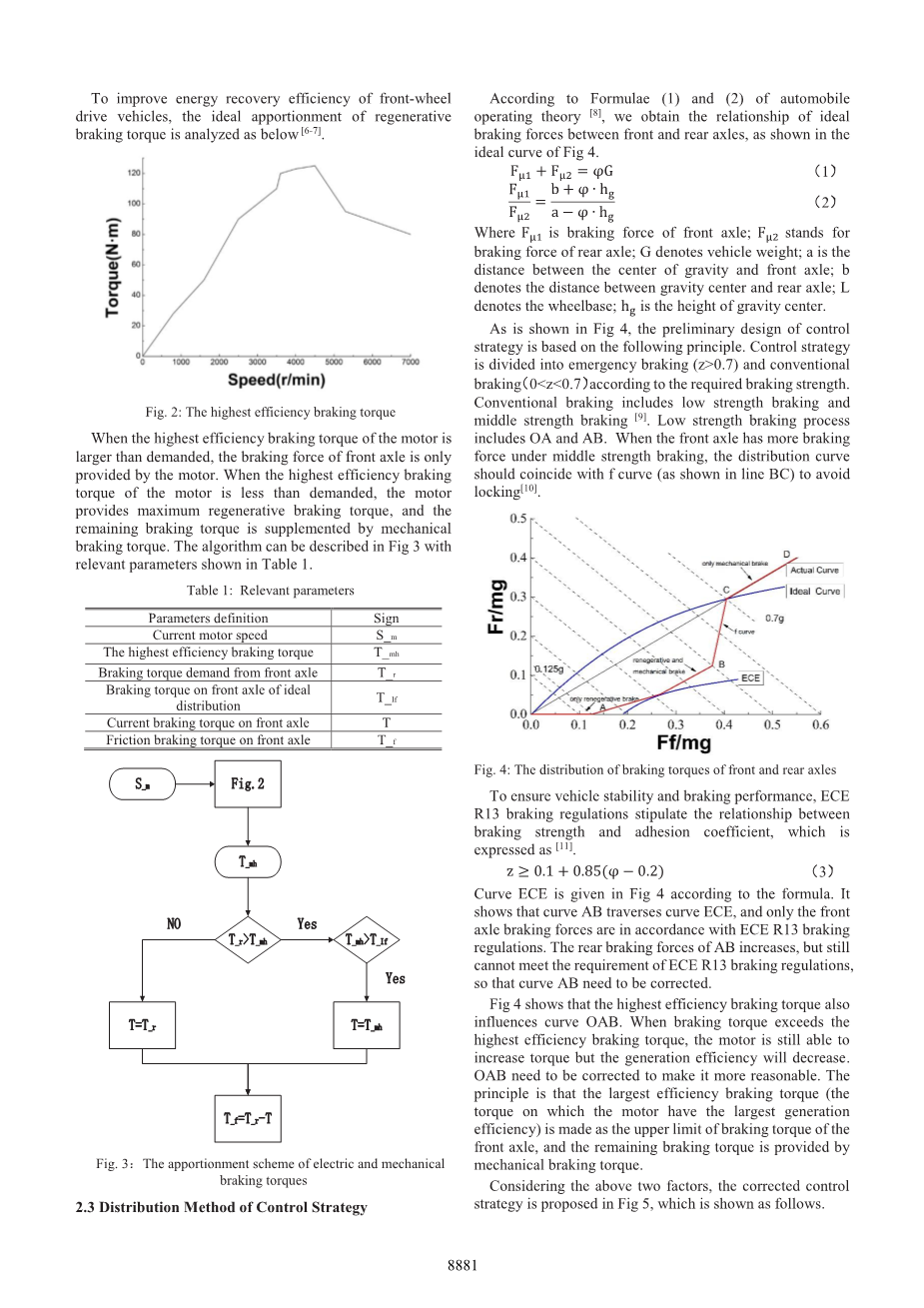
如图4所示,控制策略的初步设计是基于以下原则分成三类的:分别是按规定的制动强度,控制策略分为紧急制动(Zgt;0.7)和传统制动(0lt;Zlt;0.7)。常规制动包括低强度制动和中等强度的制动[9]。低强度制动过程包括曲线OA和曲线AB。在中等强度制动时,由于前轴有较多的制动力,分布曲线应与f曲线一致(如线段BC所示),以避免被锁住。
图4:前后轴制动力矩的分布
为了同时保证车辆的稳定性和制动性能,欧洲经济委员会(ECE)R13制动法规规定制动强度和附着系数之间的关系可以表示为:
Zge;0.1 0.85(-0.2) (3)
根据公式,图4给出了在欧洲经济委员会(ECE)路况条件下的曲线图。结果表明,曲线AB通过曲线ECE,但是只有前轴制动力与制动法规ECE R13的曲线一致。当AB的后轴制动力继续增加时,就不能满足ECER13制动法规的要求,因此,曲线AB所代表的分配策略需要纠正。
图4显示了最高效率制动力矩也会影响制动力矩曲线OAB。当制动力矩超过最高效率制动力矩时,电动机虽然仍能增加力矩,但发电效率会降低。因此,OAB曲线也需要校正,使其更加合理。其原理是将最大效率制动力矩(电动机具有最大发电效率时的力矩)作为前轴制动力矩的上限,其余的制动力矩由机械制动力矩提供。
考虑到以上两个因素,修正后的控制策略如图5所示:
- 当制动强度小于0.125时,反馈制动力足以满足车辆制动力的要求。电动力仅适用于前轮,后轴无机械摩擦力,如图5中的OA曲线所示。
- 当制动强度在0.125~0.5范围时,反馈制动不能满足车辆制动的要求,因此前后轴的机械制动力开始增加。此时,反馈制动力优先于前轴制动力,如图5中的AB曲线所示。
- 当制动强度为0.5~0.7时,分布曲线逐渐接近理想状态,以保证制动性能,如图5中的BC曲线所示。反馈制动力降低,并且前后轴的机械制动力沿BC曲线增大。
- 当制动强度大于0.7时,只有机械制动力工作才能保证安全性和最佳制动性能,如图5中的CD曲线所示。
图5:前后轴制动力矩修正后的分布
2.4控制策略的局限性
当车轮趋向锁定时,需要启动防抱死制动系(ABS),它可以动态地控制电机制动力矩和摩擦制动力矩,使车轮速度得以保持在最佳滑移率范围内,如图6所示。
图6:PID算法
车轮滑移率可以用车轮转速和参考转速来计算,如下所示:
(4)
式中代表参考转速,代表车轮转速,R代表车轮半径。
E(s)在图 6中表示附加反馈的系统误差:
E(s)=Srequired-Sout (5)
G(s)用于PID控制功能
G(s)=KP Kd·S (6)
在上述公式之中,KP代表比例系数,Ki代表积分系数,Kd代表微分系数。
此外,提出的控制策略还需要考虑车辆的当前状态,如车速、充电状态(SOC)等。当所有这些条件都满足设计条件时,反馈制动系统才会被激活。否则反馈制动系统将不会参与制动。由上述条件得到了设计方法:在CRUISE软件中的电池管理系统(BMS)的模型中,由于当前状态信息与电池的实际电流有关,可以用公式表示为:
ibat-real=ibattimes;omega;(V)times;omega;(SOC) (7)
(8)
(9)
ibat-real代表考虑实际因素的蓄电池实际电流,omega;(V)代表能量回收速度的干扰系数,omega;(SOC)代表充电状态(SOC)下能量回收速度的干扰系数。
3.讨论和结果
3.1车辆模型
如图7所示:在Cruise 软件中建立的包含电池、马达、马达控制模组、协调控制模块与ABS控制模块等部分的整车模型,验证了所提出的控制策略。该整车模型的主要参数由表2所示。该模型的仿真结果经过了比较。([1]:传统的控制策略;[2]:新的控制策略)
图7:AVL Cruise整车模型
表2:车辆参数
|
最大电机功率(kW) |
45 |
|
电动机额定功率(kW) |
20 |
|
电机最大转矩(N·m) |
200 |
|
电机最大转速(r/min) |
8000 |
|
电池容量(Ah) |
80 |
|
传输效率 |
0.93 |
|
传输速率 |
6.3 |
|
车辆重量(kg) |
1700 |
|
轴距(mm) |
2500 |
|
重心高度(mm) |
310 |
3.2能量回收率与经济效益
图8和图9表明了在全国经济发展委员会(NEDC)和FTP75路况条件下电流的变化规律(正坐标代表的是充电电流,负坐标代表的是放电电流)。结果表明,两种路况条件下的放电电流基本一致。然而,当采用这种策略时,充电电流总是回较大。并且在FTP75路况条件下,由于在该路况条件中需要的往往是中、低制动强度,而在这类制动条件下,更大的加减速速变化会导致增幅更加的明显。
图8:NEDC条件下的电池电流
图9:FTP75 条件下的电池电流
如图10和图11所示:如果不采纳这一战略,在欧洲经济委员会(ECE)路况条件下,会产生475kJ能量,电动机消耗4787kJ能量(在CRUISE软件中,生成能量的值是负的,被消耗能量的值是正的),能量回收率为9.9%。采用这一策略时,在NEDC路况条件下,会产生903 kJ能量,电动机消耗4606kJ能量,使得能量回收率为19.6%,上升了9.7%。
图10:在NEDC和FTP75条件下产
全文共6436字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13726],资料为PDF文档或Word文档,PDF文档可免费转换为Word

