英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
将Hartley变换与Hadoop并行化以快速检测玻璃缺陷
中国北方大学信息与通信工程学院,太原
摘要
基于光栅投影的玻璃缺陷检测方法可以有效地检测各种玻璃缺陷。傅立叶变换通常可以用作基于条纹图像检测玻璃缺陷的在线处理方法。傅里叶变换处理条纹图像需要大量的计算,因为傅立叶变换是一种复杂的计算方法。为了减少计算量,本文提出了一种改进的基于Hartley变换的条纹图像处理方法。为了进一步加快计算过程,Hartley变换与Hadoop并行化,Hadoop是支持数据密集型应用程序的主要计算技术。实验结果表明,并行Hartley变换显着降低了玻璃缺陷检测的计算复杂度。.
关键词
玻璃缺陷检测, 海杜普, 哈特利变换, 图象处理, 并行化
通信
永进,中国北方大学信息与通信工程学院,太原。
邮箱:jinyong601@163.com
资金信息
中国山西省奖学金委员会资助的研究项目,
资助/奖号:2016-084
引言
浮法玻璃技术是生产平板玻璃最先进的方法。在生产过程中,如气泡,石头,锡,夹杂物,和各种缺陷的光失真可高度影响玻璃的质量。因此,在浮法玻璃生产过程中需要一种在线缺陷检测方法。
目前,有几种在线检测方法和可用于检测玻璃检测的各种装置。Jin等人提出了一种基于LED线光源投影网格的玻璃缺陷成像方法。使用一维傅里叶变换的先进条纹图像处理方法仅处理条纹图像,该方法不仅快速处理条纹相位,而且为计算缺陷表征参数奠定了基础。然而,傅里叶变换尤其是复杂的操作,涉及大量的计算。
提出的检测装置采用客户端 - 服务器模型。检测原理是玻璃中的缺陷会改变缺陷部位及其场的光学特性,导致光的吸收和折射发生变化,导致CCD接收的光子数量发生变化,导致光学成像差异。通过检测光学差异,系统可以在线模式中检测缺陷。缺陷包括玻璃生产过程中产生的夹杂物,气泡,锡斑,块石头和光变形。Peng等人的工作还可以检测各种玻璃缺陷,除了具有较小屈光度的光学畸变缺陷。由于在该方法中使用客户 - 服务器模型,随着玻璃生产方法的改进和单位产量的增加,它不能实现检测系统的良好可扩展性。由Isatra公司生产的Floatscan-Catcher&Opics(FCO)系统可以检测浮法玻璃质量标准中提到的各种缺陷。边缘方法用于此系统。有缺陷的玻璃移动过程中的边缘变化。可以根据折射的强度和梯度来计算缺陷的形状和光学变形的强度。该方法还可以检测具有较小屈光度的光学变形缺陷。由于使用高精度条纹检测器,Isla公司生产的检测系统非常昂贵,这对于中小型玻璃企业来说是不经济的。
为了解决上述问题,本文利用Hartley变换处理条纹图像,并且所提出的算法在Hadoop计算平台上运行以进行计算加速。Hartley变换就像傅里叶变换一样是一种谐波变换,它具有内在的一致性。在这种情况下,Hartley变换可以用于频谱分析而不是傅里叶变换,而不会影响缺陷检测的准确性。同时,与傅里叶变换相比,使用哈特利变换具有两个优点:(1)哈特利变换是实变换;(2)正向变换和反变换都采用相同的形式。
结果,在使用Hartley变换处理条纹图像的同时增加了处理速度。可以通过简单地处理条纹图像来获得相位图像和缺陷图像。通过缺陷图像可以清楚地看到缺陷位置,并且可以从相位图像中详细地理解缺陷信息。Hadoop架构具有高度可扩展性,它执行计算任务并将数据分配给可用的计算机集群,可以轻松扩展到数千个计算节点。结果,随着玻璃生产量的增加,检测系统可以快速扩展。该方法显着提高了条纹图像处理的速度,从而加速了玻璃缺陷的在线检测。
本文的其余部分安排如下:第2节描述条纹图像处理的算法。第3节介绍边缘图像的缺陷检测。第4节将Hartley变换与Hadoop并行化以实现计算加速。第5节介绍实验结果,第6节总结论。
条纹图像处理
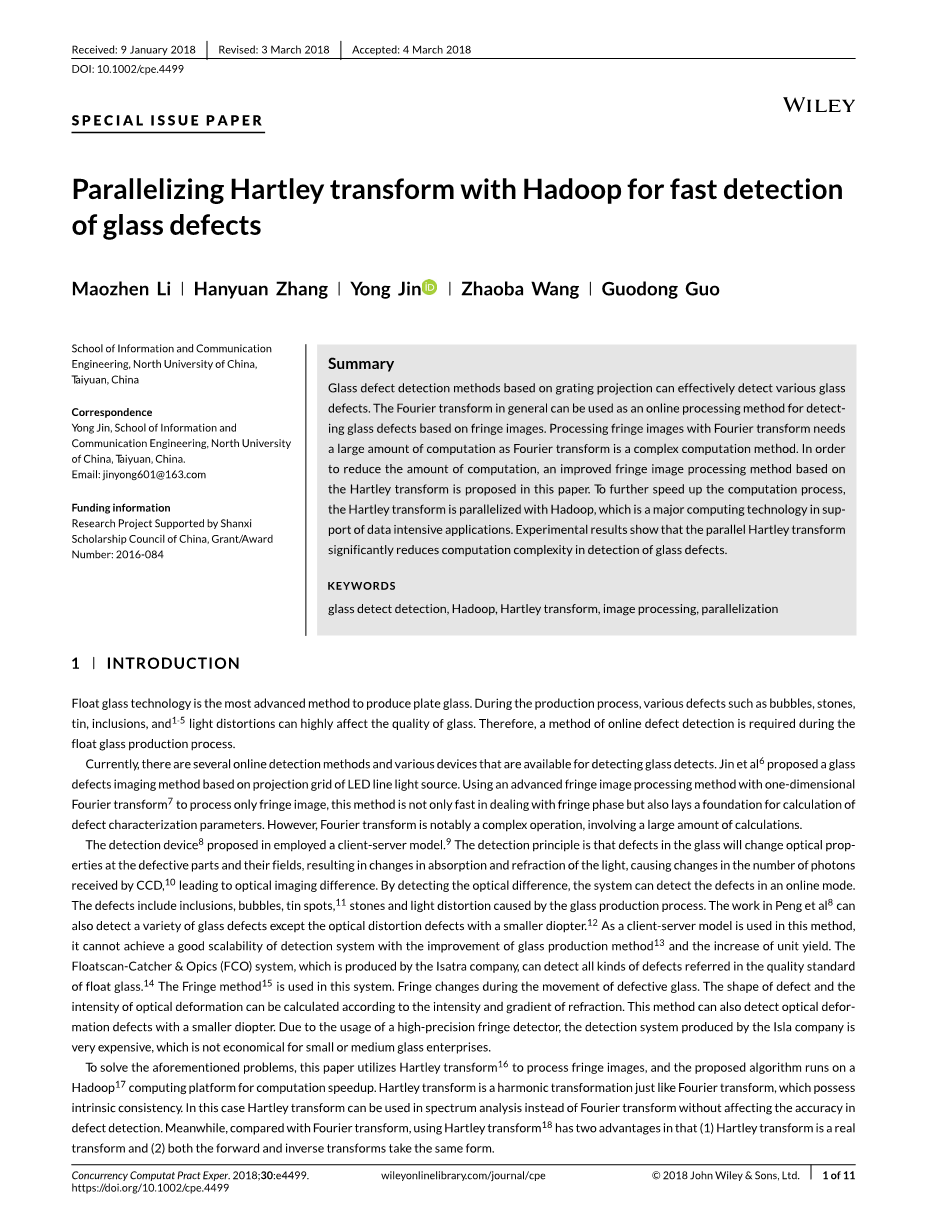
在这项工作中,条纹图像被投射到待测物体的表面上。除非物体有缺陷,否则边缘不会变形。否则,变形的条纹将显示为缺陷。条纹图像处理过程中的关键步骤是计算条纹的相位,傅立叶变换是处理条纹图像的主要方法。用傅立叶变换求解相位包括以下步骤:用于计算相位的傅立叶变换应用于投影到对象表面上的条纹。利用带通滤波器滤除条纹信息的光谱分量,该光谱分量稍后将移位到原点,最后通过完成逆傅里叶变换获得条纹的相位。上面提到的过程如图1所示 。
但是,傅里叶变换有大量的计算。自Hartley变换具有类似于积分核进行傅立叶变换,并且最变换特征类似于傅里叶变换,快速哈特利变换(FHT)可通过哈特利容易地构成的变换。在实数运算中,Hartley变换的中间结果量小于复数运算的一半。因此,与傅立叶变换相比,Hartley变换便于处理并节省存储器。
这项工作利用哈特利变换处理条纹图像。一般地,条纹图像处理方法包括:Hartley变换,带通滤波器,带阻滤波器,移频,逆哈特利。由于条纹图像的方向垂直于x方向并且y方向上的值是恒定的,因此我们仅需要为条纹图像的每条线计算一维变换。
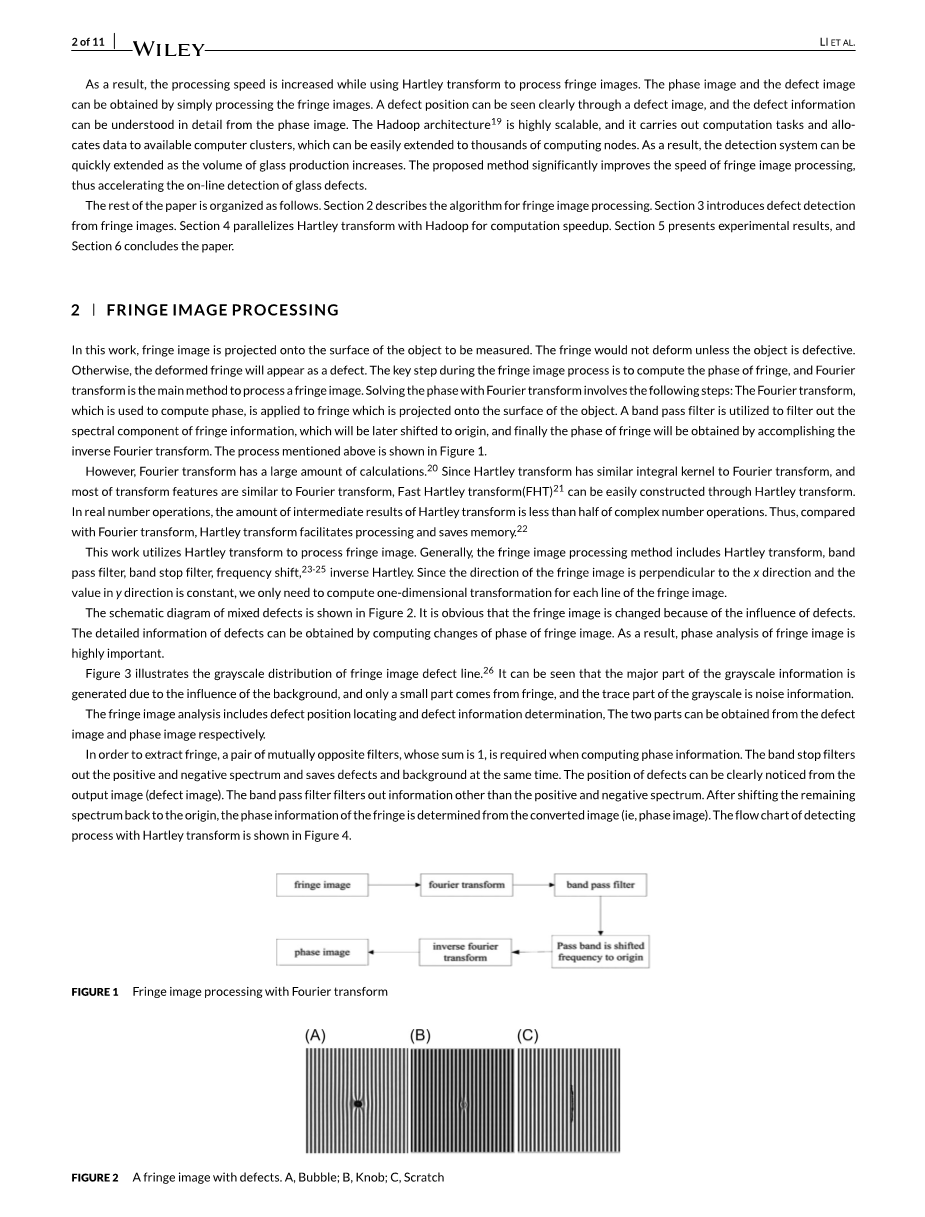
混合缺陷的示意图如图2所示 。很明显,由于缺陷的影响,条纹图像发生了变化。通过计算条纹图像的相位变化可以获得缺陷的详细信息。结果,条纹图像的相位分析非常重要。
图3示出了条纹图像缺陷线的灰度分布。可以看出的灰度信息的主要部分中产生由于背景的影响,只有一小部分来自条纹,灰度的轨迹的部分是噪声信息。
条纹图像分析包括缺陷位置定位和缺陷信息确定,这两个部分可分别从缺陷图像和相位图像中获得。
为了提取条纹,在计算相位信息时需要一对相互相对的滤波器,其和为1。带阻滤除正负光谱,同时保存缺陷和背景。可以从输出图像(缺陷图像)清楚地注意到缺陷的位置。带通滤波器滤除除正和负频谱之外的信息。在将剩余光谱移回原点之后,根据转换后的图像(即,相位图像)确定条纹的相位信息。使用Hartley变换的检测过程的流程图如图4所示 。
图1 对条纹图像进行傅里叶变换
图2 A 带有缺陷的条纹. A, 气泡; B, 瘤子; C, 划伤
图3 条纹图像缺陷线谱的示意图
图4 用Hartley变换检测过程的流程图
对边缘图像的缺陷检测
条纹图像中的缺陷会改变边缘,其中包含缺陷的特征。考虑到相移方法和傅立叶变换方法的缺点,本文基于Hartley变换处理条纹图像。
用于条纹图像处理的Hartley变换
给定具有Ntimes;N像素的条纹图像,由于没有移位频率操作,逆傅里叶变换的虚部为零。对于哈特利变换,没有必要考虑虚部,因为哈特利变换是一个真正的变换。基于上面的讨论以及Hartley变换和傅立叶变换之间的对应关系,不需要调整Hartley变换。通过使用与傅立叶变换相同的过程,我们可以实现相同的结果。
在带阻滤波期间,电阻带是一组水平轴(a~b)。傅里叶变换的带阻滤波是
(1)
类似的操作应用于Hartley变换
(2)
带阻滤波操作滤除正负光谱,并留下背景,缺陷和噪声频谱。滤波F band _ reject _ filter H band _ reject _ filter的输出分别是使用傅立叶变换和Hartley变换的带阻滤波的结果。
直接对前一结果应用逆变换
(3)
对于哈特利变换操作,我们有
(4)
当傅里叶变换用于从条纹图像计算缺陷图像时,每个像素的值等于实部的平方和操作结果的虚部的平方之和的平方根。这点。由于不存在相移操作,因此傅里叶逆变换的结果是实数,并且哈特利变换本身是实数运算,这将导致逆哈特利变换的结果等于逆傅立叶变换。因此,可以使用Hartley变换代替傅立叶变换,以加快处理速度。将我们的方法应用于条纹图像的每一行,结果如下所示。
图5显示了使用Hartley变换和傅立叶变换计算条纹图像的缺陷图时的一致性。Hartley变换的使用将使该过程更简洁和有效,因为计算中不涉及复数。
条纹相位处理的Hartley变换
在计算有效相位主值曲线期间,我们从包含移位操作的逆傅立叶变换得到的虚部不为零。由于涉及相移操作。然而,Hartley变换是实数变换,导致缺少虚部。在这种情况下,需要调整Hartley变换以将实部和虚部与变换结果分开,以满足计算相位的要求。
傅里叶变换结果的实部和虚部可以通过对哈特利变换的结果进行简单的变换来获得。实信号的正傅里叶变换是偶数序列,虚部是奇数序列。Hartley变换的结果可以分解为偶数序列和奇数序列的和,它们分别等于傅里叶变换的实部和虚部。偶数序列表示为并且奇数序列表示为两者都可以从等式5计算,其中傅立叶变换的实部和虚部分别表示为和。
公式之间的关系如下:
(5)
正变换的结果可以分为两部分,即偶数部分和奇数部分,奇数部分由下式给出
(6)
图5 缺陷图像. A, 气泡; B, 瘤子; C, 划伤
甚至是部分
(7)
其中H even = F re,H odd = - F im。
请注意,本文中使用的滤波器是理想的滤波器; 因此,只要滤波器的截止频率合适,滤波器中的频谱分量就可以是恒定的。
当执行带通滤波时,通带是横坐标(a~b)的点,c是中心频率。在傅里叶变换中,中心频率可以表示为
(8)
通带是横坐标(a~b)的点,c是中心频率。在Hartley变换中,中心频率相当于
(9)
(10)
对于傅立叶变换,将中心频率为c的点移动到轴的原点的操作相当于
(11)
类似于傅立叶变换的滤波频移,对从Hartley变换分解的偶数和奇数序列应用相同的操作将导致
(12)
(13)
然后,将逆运算应用于傅里叶滤波器频移的结果,以便计算时域的相位
(14)
将逆Hartley变换分别应用于Hartley变换的偶数和奇数部分
(15)
(16)
此时,H even _ reverse(x)被分解为两部分,即H even _ reverse _ odd(x)和H even _ reverse _ odd(x)。H 奇 _逆(x)也分为两部分,即H 奇 _ 逆 _ 偶(x)和H 奇 _reverse _ odd( x)。基本部分构成 ħ 甚至 _ 反向 _ 甚至(X)可表示为
(17)
请注意,此处和下方的v-c表示离散情况下的v-N c。
H even 全文共7637字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1075]
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

