
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
纯电动汽车驱动控制技术
摘要
纯电动汽车由于其低污染和噪音、高效率、能源泛用性和能源反馈能力,成为了新能源汽车的代表。驱动纯电动汽车的电机没有齿轮变速并且拥有固定的转矩和功率。它不仅可以在低俗范围内产生转矩,还可以在高速范围内采用弱化控制,从而在固定功率下工作。本文主要分析了传统驱动方式、电驱动桥组合驱动模式、电驱动桥一体化模式和轮毂电机驱动的优缺点。凭借着这四种模式的巨大优势,电动轮驱动汽车逐渐成为纯电动汽车发展的新方向。
1 引言
汽车行业作为国名经济的基础产业,与人们的生活息息相关,并且已然成为现代社会的一个重要因素。但是,虽然传统汽车行业为我们提供了舒适的汽车,但其对石油的消耗已经造成经济上对化石能源的重度依赖,并且加深了能源生产和消耗之间的矛盾。世界能源消耗总量的24%是汽车能源消耗。随着汽车保有量的不断增加,能源问题日益突出。此外,二氧化碳排放造成的空气污染和温室效应对我们赖以生存的环境造成了巨大影响。在能源和环境危机的情况下,提高能源消费效率,降低能源消耗有害废物的排放是非常必要的。发展新能源汽车成为未来汽车产业发展的方向,这也是解决这一问题的有效途径之一。
2 电动汽车的优点
相较于传统燃油汽车,电动汽车具有以下优点:
- 高能源利用率:现代汽车的发动机效率大约是38%,但是由于频繁的制动和低速行驶,其最终效率只有12%。但是电动汽车不会因为车辆空闲而造成能源损失,并且其80%的电能都可以转化成车辆的动能。此外,它可以实现再生制动。
- 低环境污染:电动汽车由电车和超级电容供电,因此不会释放任何有害气体。
- 低噪音率:汽车的噪音和振动取决于发动机和驾驶条件。与燃油发动机相比,电动汽车的振动源少得多,没有燃烧过程,没有机械运动,只有空气压缩机、冷却风扇、传动机构的噪音。因此,它的噪音水平比燃油发动机车辆低得多。
- 可用能源更多: 电动汽车不受石油资源的限制,可以从公共电网获取电力。因此各种方法获得的电能都可以用于驱动电动汽车,如水电、核电、热电、风电、地热能、太阳能等权力。
- 再生制动:根据能源组合机制,可以很轻易的回收在制动时产生的制动动能和势能。因此,续航里程和稳定性会得到提升。近年来,所有的电动汽车都采用了能量回收系统,可使车辆的续航里程提升10%~15%。
3 纯电动汽车的驱动特性
3.1 纯电动汽车驱动控制系统的基本要求
在电动汽车中,电动机由电机控制器驱动,再将电能转化为机械能来驱动汽车。
电动汽车的驱动控制系统有以下要求:
- 高功率系数:其有效最大功率通常能达到(1~1.25)kw/kg
- 大范围的电机转速:通常在最大速度的25%~100%时,电机能表现出小转矩和持久的动力,这可以满足电动汽车的最高速度和高速公路的巡检要求。
- 足够的启动扭矩,满足快速启动、加速、爬升和频繁启动/停止的要求。通常电机的过载系数能达到3~4。
- 快速的转矩响应,使驱动系统对各种速度范围内的驱动转矩和制动转矩的控制总体上又快又轻。在多电机系统中,电机应具有较高的可控性和良好的稳态精度和动态特征。
- 优秀的环境适应能力,可以在各种严酷的环境中工作。
- 再生制动能量回收率高。
- 具有良好的效率特性:能在较宽的速度/转矩范围内获得最佳效率,增加充电1次后的连续行驶距离,在典型的电路驱动区域通常应获得85%-93%的效率。
3.2电机的动力特性
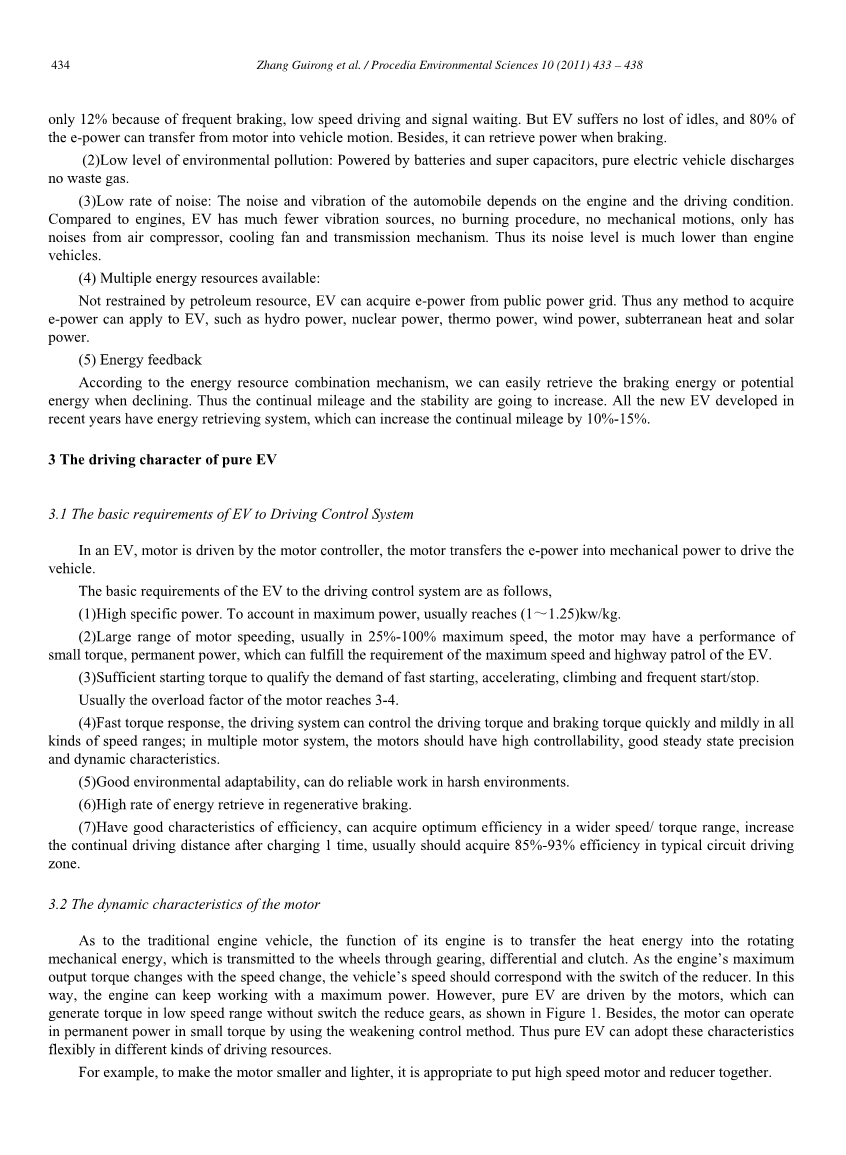
传统的发动机汽车,其发动机的作用是将热能转化为旋转机械能,通过齿轮、差速器和离合器传递给车轮。由于发动机的最大输出扭矩随着速度的变化而变化,所以车辆的速度应与减速器的开关相对应。这样,发动机就能以最大的功率持续工作。纯电动汽车由电机驱动,在低速范围内不需要切换减速齿轮即可产生转矩,如图1所示。此外,采用弱磁控制方法,电机可以在小转矩下恒功率运行。因此纯电动汽车可以在不同类型的驱动资源中灵活地采用这些特性。
例如,为了使电机更小、更轻,可以将高速电机和减速机放在一起。
使用体积小小、低转速、大扭矩的电机时,可以直接安装在车轮上,减少机械损耗。
图1为电动机的动力特性
3.3选择电机的功率
电机具有特定的效率特性,即一定的转速和功率对应一定的效率。
由于纯电动汽车的能源有限,我们必须确保电机在一个高效率的范围内运行,以获得
高的能量转换效率。
电机功率的选择既要满足一定的转速,又要在满载的情况下运行.. 纯电动汽车的最高速度必须满足,这样车辆才能以相对较高的速度行驶。
纯电动汽车主要应用于民用运输装置,在大多数情况下它们以中低速行驶。 考虑到这种情况,我们不应该选择大功率电机,否则它们将在部分负载条件下工作,这会使电机效率低得多,从而浪费有限的电能。给定预期的最大速度,所选电机的功率值一般应等于且不小于在最高速度下行驶时所需的功率。 即:
公式中:Per:电机的额定功率;M:车身质量;g:重力加速度;f:滚动阻力系数;Vmax: 最大速度;Cd:空气阻力系数;A:前挡风面积;eta;T:传动系统效率
4 纯电动汽车驱动系统的驱动控制
与燃料汽车相比,纯电动汽车具有更灵活的结构,燃料汽车的能量通过刚性联轴器和轴传递。然而,在纯电动汽车中,能量是通过柔性电线传输的。选择和定位电动汽车零件是非常灵活的。对传统车辆来说,变速箱是必不可少的一部分。选择什么样的传输箱是第一个考虑因素。
但这与纯电动汽车完全不同。驱动电机的转矩和转速完全可以由电气控制器控制。
因此,在设计传输系统时,我们有多种不同的选择。
纯电动汽车电动机非常灵活,多种电动机可作为电动汽车驱动电机,如直流电机、交流电机和车轮电机。
不同类型的储能,如电池、燃料电池、超级容量和高速车轮等,都会影响电动汽车的重量、体积、长度,从而影响性能。
这些不同的选择使纯电动汽车的设计非常灵活,并产生了最佳的选择指南。
纯电动汽车的驱动模式包括传统驱动模式、电机驱动桥联合驱动模式、电机驱动桥集成驱动模式和车轮驱动模式。 见图2。
- 电机;2-离合器;3-变速器;4-传动轴;5-驱动轴;6-电机驱动轴联合驱动系统;7-电机驱动轴集成驱动系统.8轮电机驱动系统.9-转向系统
图2电动汽车驱动系统的驱动方式
4.1传统的电动汽车驱动控制
在开发EV的早期,大多数EV采用传统的离合器-变速器-轴驱动轴-轮驱动模式,即传统的驱动模式,如图4a所示。
传统驱动模式的特点是:
- 电动机取代了发动机
- 仍然使用传统汽车的变速系统,包括离合器、变速器、轴和驱动桥
- 具有F-F,R-R等多种驱动模式
- 结构复杂,效率低下,电机性能不能完全应用
4.2电机驱动桥联合驱动模式
电机驱动桥联合驱动系统是在电机输出的外壳下安装减速齿轮和速度差动齿轮。动力通过左右两半轴驱动车轮。电机,减速机和驱动桥的壳体连接在一起,它们的轴相互平行。因此,整个驾驶系统变得更加紧凑。这种驱动模式如图4b所示。
电机驱动桥联合驱动模式的特点是
- 在电机输出的壳体下安装减速齿轮和速差齿轮,形成电机驱动桥联合驱动系统。
- 具有F-F,R-R等多种驱动模式
- 传动结构紧凑,传动效率高,安装方便
4.3电机驱动桥一体化驱动模式
电机驱动轴综合驱动系统是一种专门制造的空心轴。它结构紧凑,体积小,可以在EV框架下设计。电机驱动桥集成的驱动模式如图4c所示。
这种驱动方式的电机可以与双电机形成集成的驱动轴传动系统。它移除了齿轮,完全实现了“机电一体化”。如图3所示
。
1-左轴;2-左驱动电机;3-E控差速器;4-右驱动电机;5-右轴
图3由两个双电机驱动系统组成的永磁电机
电机驱动桥综合驱动系统的特点是:
(1)在电机盖上安装齿轮和差分寻边器。 电机有一个空心轴,驱动轴的一半穿透它。
(2)具有F-F、R-R等多种驱动模式。
(3)传动紧凑,传动效率高,安装方便。
4.4四轮电机驱动模式
轮电机的分布式驱动系统已经完全脱离了传统的发动机车辆综合驱动模式..
电机安装在车轮中,即电轮驱动。它可以减少车辆的弹簧质量,并且可以为传输留出空间来部署电池和其他部件。
该电机可以部署在两个前轮、两个后轮或四个车轮上,形成前轮驱动模式、后轮驱动模式或4轮驱动模式。 车轮驱动模式如图4d所示..
电机驱动桥一体化驱动方式的特点和优点是:
(1)离合器、变速器、轴系、差速器、变速器等系统被拆除,整车质量明显降低,从而降低了生产成本。
(2)与发动机车辆相比,电动驾驶车辆只有很小的磁性和机械噪声,从而大大降低了噪声。
(3)电动轮与电源的连接采用柔性电缆,使用空间不大。
(4)电动轮驱动应用后,全轮驱动技术大大简化。对于基于电动轮驱动的全轮驱动车辆,可以自由切换不同的驱动模式,有利于电机在高效率范围内工作。因为当汽车在道路上行驶状况良好时,所需的功率相对较小,因此可以应用双电机驱动。但在加速、爬坡和高速条件下,我们可以启动全轮驱动,保持汽车的最佳动力。每个车轮的驱动功率可以根据行驶状态进行实时控制,从而实际实现车辆的“E-主动底盘”。
(5)在每个车轮上应用制动能量回收系统,可以大大提高能量利用率。与单一机动车辆相比,其能量回收率要高得多。
(6)如果在4轮电动车上应用4WS技术,将实现车辆转向的性能,并有效减小转弯半径,甚至0转弯半径,从而大大增加转向的灵活性。
5结论
驱动系统是纯电动汽车的主要系统。
纯电动汽车的行驶性能取决于其驱动系统的性能。参数的驱动方式和配置将对纯电动汽车产生很大的影响。最近国内对纯电动汽车的研究都是基于改装车进行的。
纯电动汽车的改造为通用机电一体化项目。改造后实现高性能的方法不是简单地用电机和电池代替发动机和油箱。
它必须找到合适的电池,电机,变速器,减速器和控制系统,并将它们匹配在一起。在主程序中,它们应具有可靠的连接和合理的轴荷分配。
参考文献
- 徐武洲,纯电动汽车驱动系统设计与优化的配套,武汉理工大学,2007年。
- 王奎,《纯电动汽车动力系统控制策略与软件开发》,天津大学,2004年。
- 康龙云,《新能源汽车与电子技术机械》,工业出版社北京,2010.1
- 李斌华,《纯电动汽车机动推进系统控制的策略研究》,湖南大学,2005年。 5
- 李兴虎,《电动汽车介绍》,北京理工大学出版社,. 8
- 坂井信一郎和堀洋一,《电动汽车抗打滑控制的优势》,EPE杂志,第一卷。 11,No. 4,2001.11
- [7]Shin-ichiro Sakaia,Yoichi Hori,《电动汽车快速小反馈回路的高级运动控制:使用4轮的基本实验》 motored EV 'UOT Electric March IIā, JSAE Review 22 (2001)
先进材料研究 在线:2013-06-27
IS SN:1662-8985,Vol. 711,pp482-485
doi:10.4028/www.scientific.net/AMR.711.482
2013年瑞士Trans Tech出版物
电动汽车轮毂液压马达驱动系统的研究
Wang Bin*1, a Lin Xinru2, b ,Li Shiheng1, c Zhang Bin1, d
1 中国盐城盐城工学院UGS学院
2 中国镇江江苏大学汽车与交通工程学院
a wangbin@ycit.cn, b 303693182@qq.com,

