
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一种适用于旋转线性电动机电动汽车的分布式驾驶和转向系统
摘要
本文介绍了一项为期两年的意大利国家研究项目框架内正在进行的活动,该项目旨在开发电动汽车(EV)的分布式驾驶和转向(DaS)系统。该系统是围绕一个嵌入旋转线性电动机的致动模块构建的,该致动模块包括一个功率转换器和一个用于控制电动机的本地电子控制单元(ECU)。致动模块旨在使车轮处于活动状态,从而使其具有推进和转向功能。继而,DaS系统包括一个中央ECU和一个用于控制和联网系统的现场总线,以及一个电源级。所考虑的项目着重于配备两个主动轮的轻型电动汽车的DaS系统。
关键词 电动汽车、分布式驱动和转向系统、旋转线性电动机
一、引言
电动汽车(EV)是内燃机(ICE)汽车的一种有效的替代方案,特别是对于城市和乡村交通而言,就算当今电池中存储的能量有限,行驶距离受到限制,但并不妨碍对他们的使用。事实上,电动汽车消除了局部排放,而且比具有类似功率大小的ICE车辆效率更高[1]。
除了推动力,未来的电动汽车有望使其他车辆的功能电气化,例如转向,被动制动和悬架。经过正确设计的电动执行器(EAs)对比机械或液压执行器具有相对性的优势。实际上,EA更低的损耗和更好的控制能力可以极大地改善车辆性能,能效,主动安全性和驾驶员舒适度。在一个中央和一些本地电子控制单元(ECUs)的管理下,可以控制EA,以优化方式执行驾驶员所要求的车辆相关的任务。另一方面,现代EA能够达到的高度紧凑性以及对车厢的大空间的需求推动其将执行车辆功能的设备安装在车轮中,从而诞生了主动车轮的概念。
一个主动车轮可能需要肩负4种基本的车辆功能:(1)推进和再生制动,通过调节电动推进马达产生的扭矩来获得;(2)被动制动,通过给EA充能,将摩擦垫压到固定在车轮上的摩擦盘上;(3)转向,通过控制连接车轮的电动机的位置;(4)主动悬架,通过控制经由EA协助的弹簧反作用力。
主动轮与相关联的装置实际上可以变成功能模块,以通过机械连杆,电线和通信线连接到车辆的主体。这种布置被称为线控转弯[2],它为电动汽车提供了更多优点,例如模块化,维护速度更快等。由于每个基本的车辆功能都需要机械自由度(DoF),因此需要使用一种独特的EA来执行它们。尽管如此,部署多自由度的EA能够在只有一个电机的情况下同时执行多个动作大大降低线控转角布置的复杂性,体积和重量,从而使其更加实用。
为了研究这种方法的可行性,一项为期两年的意大利国家研究项目被制定,旨在开发具有行驶和转向能力主动轮的分布式驾驶和转向(DaS)系统。该项目由大学和研究部于2008年秋季共同资助,由比萨,德里亚雅特斯,帕多瓦和那不勒斯大学的研究部门共同实施,重点是研究安装在轻型电动汽车上带有两个主动轮的DaS系统。本文的目的是介绍在项目框架内正在进行的与DaS系统的主要组成部分有关的研究活动。
二、系统架构
具有两个主动轮的DaS系统的总体构架如图2所示。该系统的主要组件如下:(1)具有旋转线性运动的2自由度电动机;(2)功率转换器和用于提供和控制2自由度电动机的本地ECU;(3)中央ECU和现场总线用于管理和联网DaS系统;(4)用于通过电源总线为DaS系统供电的电源级。
二自由度电机,功率转换器和本地ECU构成了主动车轮的电驱动器。电驱动器以及将电机耦合至车轮和底盘的机械装置共同构成了致动模块。后者通过分别使用电动机的旋转运动和线性运动来推动和操纵主动轮[3]。
DaS系统由中央ECU管理,该中央ECU处理来自驾驶员界面的命令以及来自本地ECU和车辆传感器的反馈信号,并未执行模块生成推进和转向参考。考虑到系统操作的安全性,分布式DaS系统内的数据交换被提交给现场总线,该现场总线必须支持容错通信。该系统能够通过考量车辆状况和设备状况以及环境状况来运行驱动和转向功能。可以利用这种能力来增强整个车辆的行驶表现。
接下来将介绍与DaS系统主要组件有关的研究活动。
注:Driver Interface驱动程序接口, Sensors传感器, Fieldbus现场总线, Power Supply电源, Power Bus电源总线, Local ECU本地ECU, Power Converter电源转换器, Actuation Module执行模块, Rot-Lin Moter林特电机, Coupling联轴器
图1 DaS系统结构
三、旋转线性电机
每个致动模块的核心部件由旋转线性电动机(即2-DoF电机)构成,该电动机能够在沿同一轴旋转和移动的同时产生扭矩和轴向力。文献中提出了集中旋转线性机器类型(例如[4])。然而,由于它们的复杂行为,对于它们中的一些个体难以有效地实现力和转矩的分离控制。对于另外一些个体,想要理想地进行简单地控制,就需要特定的材料或制造工艺,例如铁粉芯,它们的扩散程度还不高,因此仍然想当昂贵。尽管旋转直线电机在诸如加工制造,机器人技术,高级汽车等许多应用中具有潜在吸引力,但仍很少使用。为克服这些缺点,一种新型的旋转直线永磁机[5]被提出,旨在实现良好的可控制性,同时允许使用低成本的常用材料和工艺。为简洁旗舰,此处仅报告机器基本型号的简要概述;有关更多详细信息,请参见相关论文[6]。
A.机械构造
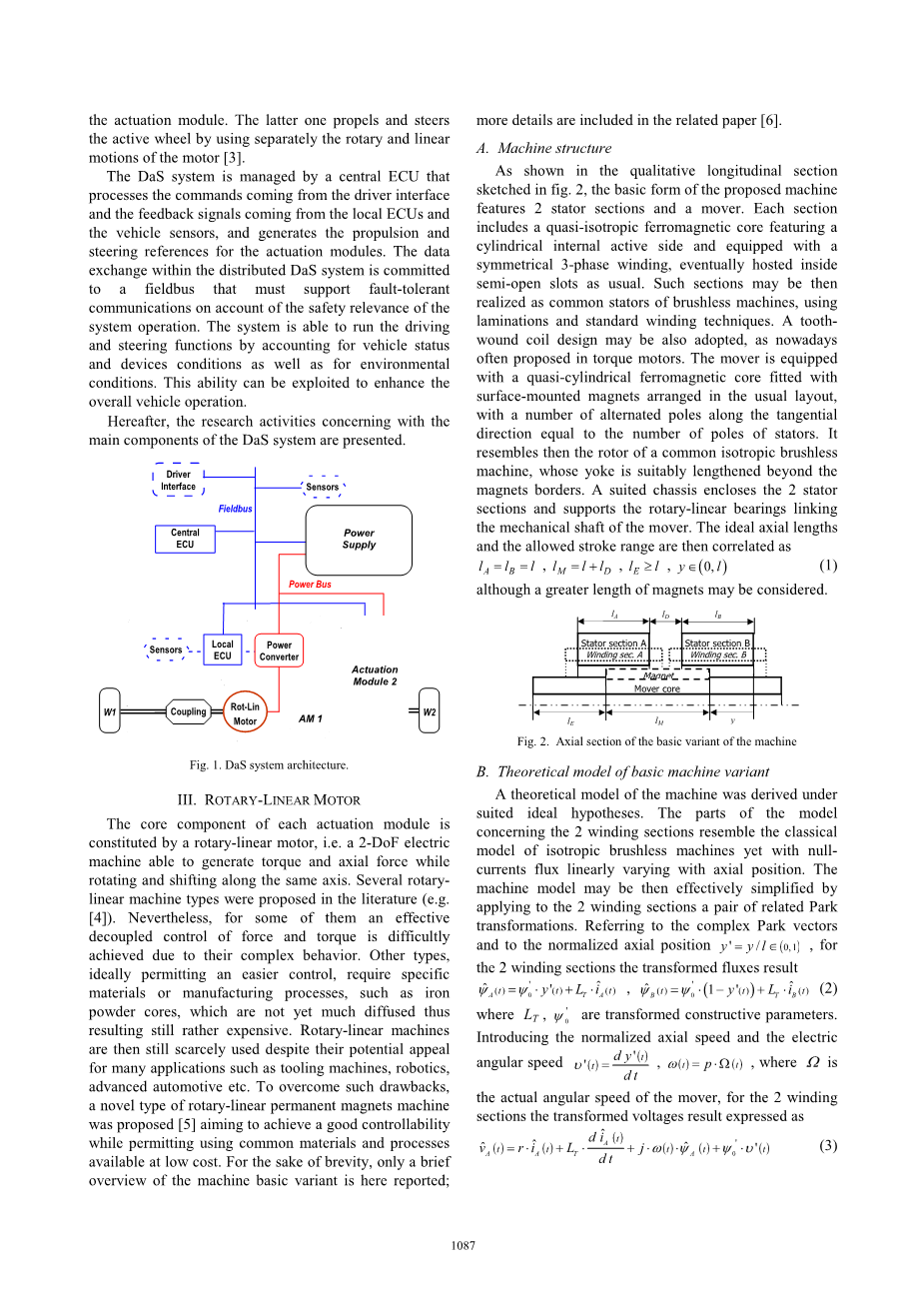
如图2所示的定性纵向剖面图,机器的基本形式是具有2个定子部分和1个动子。每个部分都包括一个准各向同性的铁磁芯,该芯具有圆柱形的内部面而且配备有对称的三相绕组,最终像往常一样位于半开槽内。然后可以使用叠片和标准绕组技术将这些部分实装成无刷电机的通用定子。就像如今在转矩电动机中经常提出的,也可以采用齿绕线圈设计。动子配备有准圆柱铁磁芯,该铁芯配有按常规布局排列的表面安装磁体,沿切线方向的交替磁极数等于定子的磁极数。然后,它类似于普通的各向同性无刷电机的转子,其磁轭被适当的延长到磁铁边界之外。一个合适的机架包围着两个定子部分,并支撑连接动子机械轴的旋转直线轴承。然后,将理想的轴向长度和允许的行程范围关联为
尽管可以考虑使用更长的磁铁。
图二 机器基本型号的轴向截面
B.基本机器变型的理论模型
试验在合适的理想假设下得出了机器的理论模型。该模型涉及两个绕组部分的各部分类似于各向同性无刷电机的经典模型,但零电流通量随轴向位置线性变化。通过两个相关的Park变换应用于两个绕组部分,可以有效地简化电机模型。参考复杂的Park向量和归一化的轴向位置,对于两个绕组部分,转换后的磁通得到
其中是转化后的构造参数。介绍归一化的轴向速度和电角速度,其中Omega;是动子的实际角速度,对于2个绕组段,转换后的电压结果表示为
其中,r是相电阻值。正如预期那样,电方程类似于各向同性无刷旋转电机的经典模型,但具有与轴向速度成正比例的互补电压项。由作用在动子上的总电磁轴向力F和转矩T组成的扭矩,产生的结果等于
F的结果与y上独立于d的电流之间的比例成正比,而T由q电流的线性组合给出,其因素取决于y。
C.控制标准
根据(5),电流的无限组合可以提供任何给定的扭矩:然后可以应用不同的调节标准。第一种可能性的分割任务,使用最有利的部分(与磁体最重叠的部分)产生扭矩,而另一部分产生力。或者可以使总的焦耳损耗最小化:在这种情况下,以表示电流相对于额定均方根值IR,可获得最佳值
作为的功能。力和转矩的值分别代表使用IR所获得的相应额定值,这些值实际上代表了机器相对于焦耳损耗的最大能力极限。如图3所示,在(7)中出现的现象具有互补趋势。考虑到每个定子部分的最大焦耳损耗约束,最小总电阻损耗准则决定了归一化力矩平面中的能力区域,从而产生如图4所示的椭圆:沿轴固定,沿轴随着大约0.83的变化而变化,根据图3所示的函数g的趋势。
图三 扭矩函数与轴向位置 图四 能力
D.等效磁路建模
为了更详细的研究2自由度驱动器中的机器操作及其调节,基于等效磁路方法,在MatLab-Simulink环境中准备了一个中层仿真模型。这种模型考虑估计绕组,槽缝的开口以及磁体之间最终间隙的实际分布的影响。例如,参考一个研究互感的趋势的案例,图5显示了同一机器的两种绕线方式的轴向和角向位置。还可以估算2个定子部分之间任何角度偏移对力矩波纹的影响:例如,在图6中,当动子位于中行程时,报告了3个偏移角的扭矩位置趋势,假设,而且根据最小焦耳损失准则使用正弦供应策略。
a.三线圈,全螺距,密封槽 b.单线圈,全螺距,10%开槽
图6 转矩与角位移不同时的角位置
四、电机供应与控制
DaS系统的致动模块的示意图如图1所示。
电机驱动器说明
功率转换器(图11)由一个直流母线构成,该直流母线为两个三相PWM电桥供电,一个供电定子部分A的绕组,另一个供电定子部分B的绕组。
图11 电源转换器
本地ECU的任务是控制动子的转速及其线性位置。在本地ECU上执行的算法基于方程(3)、(4)和(5)给出的电动机模型。旋转速度用于扭矩控制的外部控制回路和内部电流控制回路控制。线性位置由三个控制环控制:一个外部控制环,一个内部线性速度控制环和一个用于力控制的最内部电流控制环。随后的分析基于一辆轻型电动汽车。
B.转速调速回路
设置,转速控制环由图12的框图建模,其中从(7)开始,对于定子A区域使用,对于定子区域B使用。
图12 转速控制回路框图
负载转矩Ti是由车辆行驶时的滚动阻力引起的。在最基本的水平面,滚动阻力可以假定为常数,系数为0.02[7]。假设车辆总重量等于300kg,车轮半径等于0.2m,则Ti为3Nm,等效惯性矩为J=6kgm2。假定摩擦系数B等于10-2Nms。
使用由增益和时间常数控制的PI,可以获得20Hz 的环路带宽。
C.线性速度和线性位置控制回路
线性速度和线性位置控制回路通过图13的框图进行建模,其中从(6)开始,对于定子A区域使用,对于定子区域B使用。
图13 线性速度和线性位置控制回路的框图
值得注意的是,(8)和(9)是基于幅度不变的d-q变换的。负载力F1是由于转向转矩引起的,该转向转矩是由两种不同的现象引起的,一种是在非常低或零的车速下发生,而另一种是在较高的速度下发生。在停车速度[8]时,使车辆的车轮转向所需的扭矩最大,该扭矩由轮胎与地面之间的摩擦力产生。根据查找数据[8],该转矩假定为恒定值,等于12Nm。假设总转向角(从左到右)等于90°,则力约为100N。负载力的这一部分通过以下算法进行仿真:
负载力的其他分量由对准扭矩[7]产生。其值取决于转向角。它一直增加到一定的转向角,然后再次减小,从而增加转向角[9]。根据[9]中的数据,估计对准力矩的最大值等于7Nm,对应于50N的力。通过以下简化算法模拟了载荷力的这一部分:
最终实现以下算法:
使用由增益Kps=600和时间常数=0.2s控制的PI,可以获得20Hz的环路带宽。
对于线性位置控制回路,一个简单的比例控制器足以获得零稳态误差。当Kpy=13,可获得2Hz的带宽。
D.电流控制回路
电动机转矩由定子A和B的q轴电流分量控制,而动子线性移动的力由d轴电流分量控制。电流控制回路由图14的框图建模,其中,对于定子A部分使用,对于定子B部分使用。
图14 电流控制回路框图
调制频率设置为10kHz。电流回路采用PI控制器。忽略转换器的动力学特性,发现将PI控制器的增益和时间常数分别设为Kpi=6.5和=2ms时可以获得1kHz的环路带宽。
E.模拟结果
电机驱动已通过软件PSIM[10]进行了仿真。电动机的额定数据及其参数如下:
Pn=1.7kW,Vn=30V,In=50A,Omega;n=56rad/s(对应于40km/h),Tn=30Nm,Fn=110N,p=4,=0.102Wb,=1.10mH,r=0.0138Omega;,l=0.2m。
进行第一测试以模拟在零车速下的转向动作。从零转向角开始,车轮一直转向其极限位置。然后再次进行右转向直至极限位置。最终,转向角再次变为零。动子的参考线性位置及其实际值如图15所示。沿d轴的电流分量如图16所示。沿q轴的电流分量为零。
同时进行了另一个测试,以最大车速模拟转向动作。从零转向角开始,将车轮正确转向至其极限档位的一般,然后将转向角再次设为零。转向动作对车速没有影响。动子的参考线性位置及其实际值如图17所示。沿d轴和q轴的电流分量如图18所示。
仿真结果表明线性位置的参考值与其实际值之间具有良好的匹配性。由于电流限制和有限的带宽,无法实现完美匹配。
图15 线性位置参考(蓝线)和实际值(红线)
图16 定子部分A(红线)和定子部分B(蓝线)d轴电流分量
图17 线性位置参考(蓝线)及其实际值(红线)
图18 a)定子部分A(红线)和定子部分B(蓝线)d轴电流分量;b)定子部分A(红线)和定子部分B(蓝线)q轴电流分量
五、电机供应与控制
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237759],资料为PDF文档或Word文档,PDF文档可免费转换为Word

