英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
用于智能网联路口通行控制的混合整数规划方法
原文信息:Q. Lu and K. Kim, 'A Mixed Integer Programming Approach for Autonomous and Connected Intersection Crossing Traffic Control,' 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 2018, pp. 1-6.
摘要:本文提出一种混合整数规划算法(MICA)以保证智能网联环境下交叉路口的通行安全和效率。MICA算法将为进入交叉路口区域的车辆提供最快速的离散时间轨迹。在问题建模的过程加入了精心设计的约束条件以避免碰撞。基于微观交通仿真器SUMO的仿真结果显示,该算法在吞吐量方面优于基于信号灯配时优化的方法和作者之前提出的DICA算法。
介绍
研究人员认为,自治交通系统有希望能够解决交通拥堵问题,因此自治路口管理成为了近年来的研究热点。我们所需解决的问题是如何借助智能网联车的优势,提升交通流在没有信号灯或停止标志的路口穿行的安全性和吞吐量。许多研究人员采用不同的优化方法来增加吞吐量,例如非线性规划模型(基于松弛线性约束)、基于模型预测的控制框架(能够动态生成无碰撞运动)以及一种分布式的框架(其中每辆车的目标是在保障吞吐量和安全性的基础上最小化自身的能量消耗)。其中大多数方法禁止存在冲突路径的车辆同时进入路口以确保安全。另外有研究人员允许冲突车辆同时进入路口以追求更高的通行效率。为了实现这一目标,研究人员采用不同的方法将路口区域离散化为细小的网格。存在冲突路径的车辆可以同处一个路口,但不能同处一个网格。然而,大多数研究都没有设置全局协调器以获得最优的交通流。
有许多的研究聚焦于自治路口的优化控制,也有很多研究致力于允许存在冲突路径的车辆同时进入路口。然而,很少有研究同时考虑上述两点。Dai等人将路口控制模型转换为一个凸优化问题,其目标函数包含安全速度及加速度等多方面的要求,以提升乘客舒适性。该作者通过调度车辆进入路口的优先级线性化避免碰撞的约束条件以减少计算复杂度;然而这种线性化有可能会降低通行性能。还有文献提出了一种车辆-路口协同机制,通过柔和地生成交通线路,以避免存在冲突路径的车辆同时到达冲突点。
本文提出了一种优化方法来控制道路交叉口通行,该方法能够克服现有文献(例如固定策略和非线性模型)中性能不佳的问题。本文方法只处理领航车,这能够大大减少中央控制器的计算和通信负担;随后采用混合整数规划模型(MIP)优化领航车的行驶轨迹。本文的主要贡献是引入0-1变量描述车辆的决策,同时建立了避免存在冲突路径的车辆发送碰撞的约束条件,使用混合整数规划模型进行求解。仿真结果证明了所提出方案的有效性。
车路协同机制
我们假设100%的车辆为智能网联车(CAVs)。每辆智能网联车都具备V2I的通信能量,同时能够采用适当的跟车策略避免与前车发送碰撞。基于这种假设,每辆车的位置、速度、距前方交叉路口的距离都是易于获得的。作者采用集中式控制方法,即引入一个ICA(Intersection Control Agent)。作者假设所有的CAV在进入通信区(communication region)后都能与前方路口的ICA采用V2I方式进行无线通信;同时,所有的CAV装备有RFID芯片,因此ICA能获得通信区内每辆CAV的车辆编号(Vehiclersquo;s Identification Number, VIN)、所在车道、进入区域的时间。
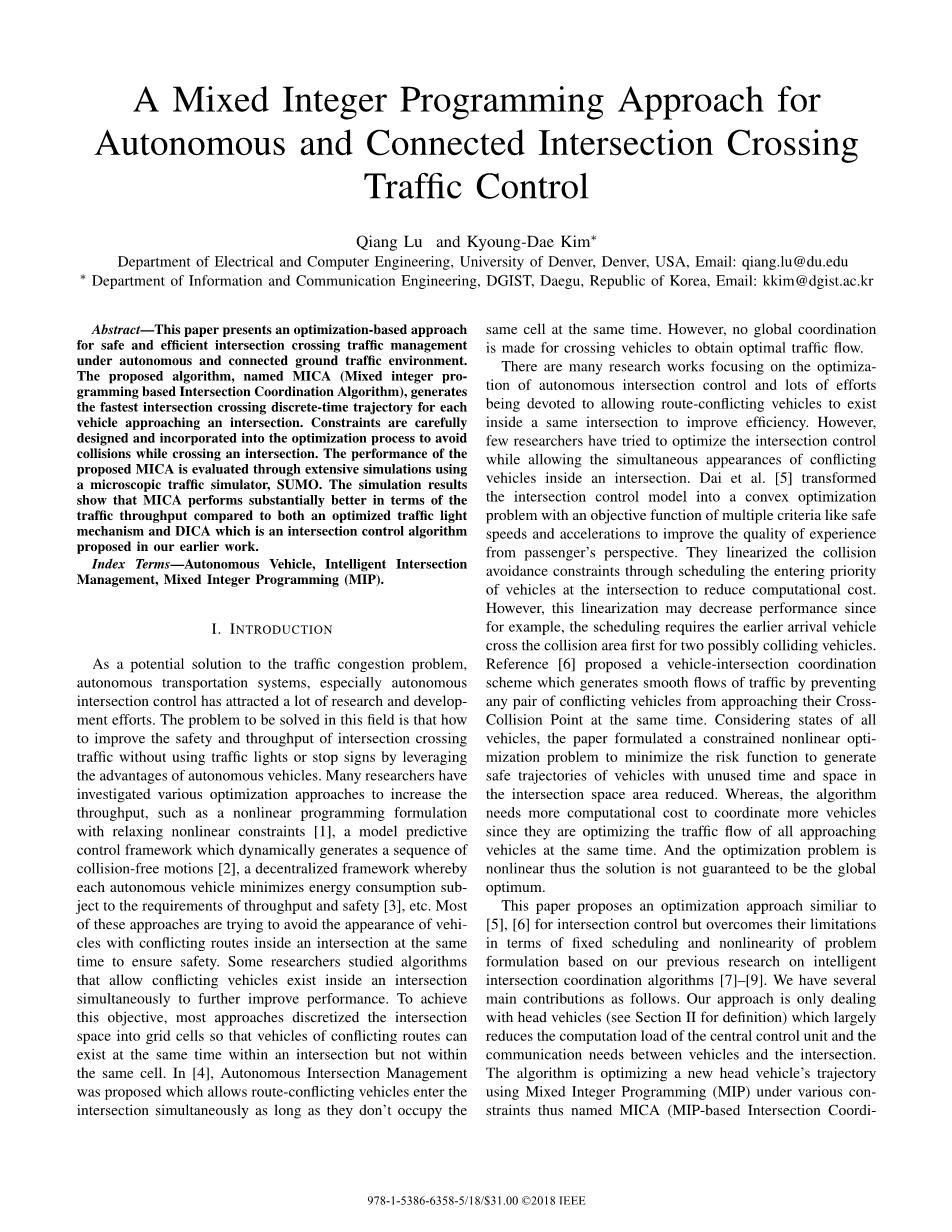
图 1展示了CAV和ICA的交互方式。作者首先定义了领航车(head or leading-trailing)的概念:①如果某辆车和路口进入线之间没有其他车即为领航车;②如果某辆车前方的车辆已经越过交叉路口进入线时即为领航车。当普通车辆成为领航车时会立即向ICA发送REQUEST消息(假设该消息包含全部ICA决策所需的信息,例如车辆当前速度、位置、线路)以请求一条确定性轨迹(confirmed trajectory)。ICA会将RESPONSE消息反馈给CAV,此时接收到该信息的车辆便称为确定性车辆(confirmed vehicle)。如果没有成为领航车,就采取跟随策略直到成为领航车(备注:这个假设可能会导致车辆在即将进入路口时急刹车减速,理想的状况是不能通过路口的车提前松油门减速,但理想状况较为复杂,涉及加减速的运动学计算)。
图 1 CAV与ICA的交互
问题建模
问题建模章节描述了我们提出的用于提升路口吞吐量的新方法。我们采用整数规划模型生成每辆在路口穿行的车辆的运动轨迹,以此保障车辆尽快穿过路口同时避免碰撞。
1)单车轨迹生成
首先考虑最基础的情况,即假设只有一辆车接近路口且路口内无车。此阶段的目标是在满足速度、加速度约束的情况下,生成该辆车的离散时间轨迹。,和分别表示车辆通过路口时遵循的路线、固定的采样时间、第个步长时车辆在路径中所处的位置;和表示最大速度和最大加速度。对于一个固定的采用视角,可以将离散时间轨迹表示为:。单车的最快的离散时间轨迹可根据式获得。此外还需满足序列顺序约束(式)、速度约束(式)、加速度约束(式)。
2)避免碰撞的混合整数规划
这一部将上述最优离散路径生成模型推广至有多辆车到达路口的情况。由于其他车辆的存在,需要加入额外的约束条件以避免碰撞。使用上标来表示正在生成最优离散时间轨迹的车辆。假设有一组车辆在目标车辆之前到达路口通信区,这些车辆的离散时间轨迹已经生成并被ICA确认。令表示中和的路径有冲突的车辆集合,接下来考虑避免与中某辆车碰撞的约束,也就是避免两者占用相同的区域。
图 2给出了一个例子。是已经确定轨迹的车辆,是即将进入路口的领航车,两者的路线存在一个冲突区域。和表示路径上即将进入区域的位置和车身完全离开区域的位置,显而易见要超出区域右边界一个车身的长度,使用表示路径上的冲突区域,用和分别表示路径上车辆当前位置距离和的长度。
对而言,有两种策略避免碰撞:①在离开之后到达;②在到达之前离开。作者采用0-1变量来表示的选择,因此避免碰撞的约束可以写为式和式。式中是一个任意的大数,是第个时间步时车辆在路径上的位置,和是刚刚到达和完全离开的时间步。当时,意味着情况①;当时,意味着情况②。
图 2 冲突区的示例
图 3 需要避免追尾的三种场景
虽然这给出的是一辆存在冲突车辆的情况,但遵循这个步骤可以推广至中所有的车辆。此外,车辆不仅需要避免和交叉路口的车辆发生碰撞,还需要避免与已确定好路径的前车追尾。如图 3,有三种需要避免追尾的场景:①:相同的进入车道,不同的离开车道;②:不同的进入车道,相同的离开车道;③:相同的进入车道,相同的离开车道(同路径)。
首先考虑情况①,用表示进入路口时的时间步,是此时的速度。作者假设前后车辆至少要保持时间间隔,如式。式中,是前后车辆的安全车距常数,是时间间隔安全常数;式中第一项表示从最高速减速到前车速度的时间,第二项用于保证安全车距。
然后通过式保证在之后间隔一个时间再到达,式中是最早能达到路口的时间步(见式),是路径上路口进入线的位置。
情况②的大致步骤与①相同,特别的是让离开后间隔后再离开路口。情况③则需同时包含情况①、②的约束。
3)优化模型
作者聚集了式、式、式中的决策变量,定义决策变量,式中,表示中的第个元素。优化模型如式,需同时满足前文所述约束。
基于MIP的路口控制
MICA算法的框架图如图 4,具体的算法细节在作者之前发表的论文中进行说明。
图 4 MICA算法
MICA算法仿真
使用开源的微观交通仿真器SUMO进行仿真,来检验MICA算法的性能。随后作者使用Python编写了算法程序,通过TraCI API接口与SUMO进行仿真,整数规划优化问题是通过Gurobi optimization software(优化问题求解器)进行求解的。
作者还在原文中列出所采用的仿真参数,包括车辆尺寸参数、速度、加速度、路口区域面积、交通流量等。特别的,作者还采用Jainrsquo;s faieness index来描述调度结果的公平性。
总结
本文使用MIP为每辆车生成穿越路口的轨迹。在建立优化问题的模型时,精心设计了避免碰撞的约束条件,以此来保障路口的安全性。仿真结果显示所提出的MICA算法的吞吐量和公平性指标均优于信号灯配时优化方法和作者之前提出的DICA算法。
未来将考虑真实环境中V2I无线通信特性,并将其融入算法框架;同时,还会考虑多个路口间的协同通行问题。
补充文献1:作者之前发表的DICA算法
原文信息:Lu, Q., Kim, K. Autonomous and connected intersection crossing traffic management using discrete-time occupancies trajectory. Appl Intell 49, 1621–1635 (2019).
为保证交叉路口的通行安全和效率,作者提出一种基于占用离散时间轨迹的交叉路口交通协调算法(DICA)。这种算法的计算复杂度是,其中是允许穿过路口的车辆数量,是交叉路口穿越线路的最大长度(单位是什么?)。为了提升算法的计算效率,作者对算法进行了改进。改进后算法的计算复杂度是。作者使用SUMO对改进算法的有效性进行了验证,并与基于信号灯配时优化的方法进行对比分析。
作者考虑到“网格化道路区域”方法的难点——网格大小的选择。较小的网格间隙能够提供更多的柔性,然而不可能无限地小,因为计算复杂度与网格间隙的平方成正比;当单元格尺寸变大,计算复杂度会降低,但交叉口区域使用不再高效,可能会导致更低的交通吞吐量。另外,针对现实中存在的通信延迟和丢包问题,作者提出两个解决方案:①保守地使用延迟的上界拓宽车辆占用的时空区域;②在CAV和ICA的通信中加入ACK消息,以确认REQUEST和RESPONSE消息传输准确。
为了简单起见,作者使用车辆的位置和方向角来表示车辆的时刻的状态。作者假设,所有车都使用相同的采样周期,且依据此周期足以生成车辆在交叉口内实际连续运动的近似值。
如图 5,DTOT(discrete-time occupancies trajectory)是序列的特定时间可用的矩形空间。路口管理智能体ICA将根据所以已确认的DTOTs来调整正在请求的DTOT以避免碰撞,调整完成后使用RESPONSE消息将所需信息(包含VIN、vehicle size、timed、timed state sequence)发送至正在请求进入路口的车辆。
图 5 存在冲突路线的车辆的DTOT
考虑到现实中车辆根据接收到的DTOT行驶时会存在跟踪误差,作者在调度完成后增大了DTOT中每一个时刻占用区域的范围,因此可以不用在调度的同时考虑跟踪误差的影响。
图 6展示了基于DTOD的路口交通协同算法的伪代码,详细的符号解释见原文。此外,作者进行了算法的计算复杂度分析,推导过程见原文。
图 6 DICA算法伪代码
随后,作者针对DICA算法提出了四项改进措施:①减少需要进行时空冲突检查的车辆数量,即把不可能与待生成轨迹车辆发生碰撞的车辆排除在外;②提升空间碰撞检查的效率,即只对两条轨迹的交叉点(冲突点)进行检查;③采用近似的时间占用间隔计算方法,即通过车辆的速度、加速度、车身长度来计算占用的时间间隔,而不是通过基本DICA算法详细地搜索得到;④在两项DTOT的时间冲突检查中使用二元搜索。改进后的算法复杂度降低至。
作者使用SUMO进行仿真,从计算时间、安全距离、主次道通行公平性(各车道通行时长的差异性、通行时间方差)、吞吐量等方面进行了对比分析,结果显示在道路不拥堵的情况下,改进DICA算法比红绿灯效果更好。未来,作者考虑将分组策略融入算法机制中,使得算法能适用于各类交通流量(拥堵、通畅);还会松弛“完美通信”和“精确跟踪轨迹”这两个假设条件,并考虑车辆故障的情况;下一步还要考虑混合车流,即智能网联车与人类驾驶混行的情况。
补充文献2:车辆运动的非线性动力学模型
原文信息:Y. Bian, S. E. Li, W. Ren, J. Wang, K. Li and H. Liu, 'Cooperation of Multipl
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237478],资料为PDF文档或Word文档,PDF文档可免费转换为Word

