一种新型电缆驱动码垛机器人的设计与分析
国际高级会员杂志
机器人系统
2017年11月至12月;1-12
DOI链接:10.1177 / 1729881417741084
journals.sagepub.com/home/arx
訾斌,王炳尧,王道明
摘要
为了满足大工作空间,低惯性和高精度的要求,本文介绍了一种新型码垛机器人。 利用空间混合电缆驱动的串行--并行结构和平行四边形机构,机器人能够在刚度,模块化和可重构性方面取得有利的突破。还对机器人的运动学和静力学进行了研究,并提出了一种计算有限自由度电缆驱动串并联机器人工作空间的算法。然后计算不同负载下机器人的工作空间,比较分析不同负载下工作空间的拓扑特性。结果表明,所提出的结构显着扩大了工作空间,并且还可以有效地完成码垛任务。
关键词
线缆驱动码垛机器人,工作空间,设计和分析,串并联机械手
收到日期:2016年9月18日;
接受日期:2017年10月16日
主题:移动机器人和多机器人系统
主题编辑:Marco Ceccarelli
副主编:武田幸雄
引言
在20世纪80年代推出的码垛机器人开发用于执行抓取,搬运,堆垛和卸垛任务。 随着人工成本的增加和机器人系统成本的降低,码垛机器人在制造系统,包装和物流行业等方面的需求不断增加。
目前,已经提出了几种平行并联机器人,如直径和三角形,用于拾取和放置任务.1特别地,两自由度(2自由度)三平行四边形平面并联机器人(PPM) 并联机器人和串联机器人的优点已被广泛应用于码垛。[2]平行四边形机构的使用使得二自由度PPM比传统的串联和并联码垛机构具有更高的刚度,更低的惯性和更大的工作空间[3]。然而,多刚性连杆和 旋转底座上的致动器极大地限制了堆垛性能的进一步提高。
合肥工业大学机械工程学院,合肥,中国
通讯作者:宾子,合肥工业大学机电工程学院,安徽合肥路311号,230009
电子邮件:zibinhfut@163.com
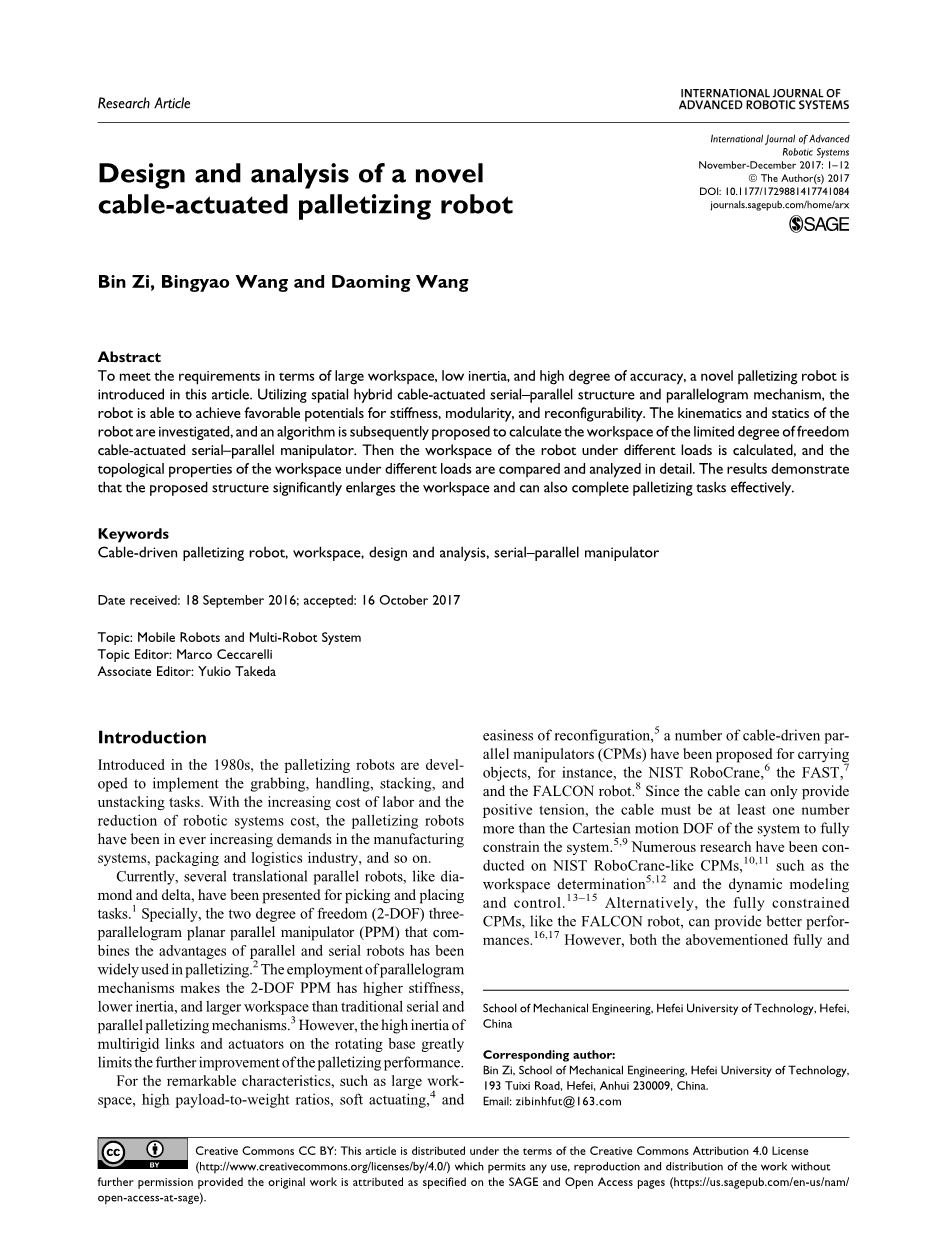
图1. CASPR的简化三维模型。 (a)用于驱动电缆的锚机模块,(b)底座上的齿轮减速器系统,(c)轴5上的扭转弹簧,以及(d)齿轮箱的细节。 CASPR:电缆驱动的串行并行码垛机器人。
对于显着的特点,如大工作空间,高有效负载重量比,软启动,[4]和[5]已经提出了许多电缆驱动的并联机械手(CPM)用于搬运物体,例如NIST RoboCrane,FAST[7]和FALCON机器人[8]。由于电缆只能提供正极性 电缆必须比系统的笛卡尔运动DOF至少多一个数字才能完全限制系统。[5,9]在NIST类似RoboCrane的CPM上进行了大量的研究[10,11],如工作空间确定[5,12]和动态建模和控制[13-15]。另外,像FALCON机器人这样的完全约束的CPM可以提供更好的性能。[16,17]然而,上述全面和不足约束的CPM占用了大量的空间,工作空间中的辐射电缆与其他结构相比,肯定会增加碰撞风险。[18]
为了克服这些缺点,生物激发有限自由度光缆驱动系统已经引起了研究人员的广泛关注。通常,有限自由度电缆驱动系统由有限自由度刚性结构和平行致动电缆组成。在Kino等人的研究中讨论了电缆驱动的串行链路系统对虚拟现实的静态条件和性能。[18]在Behzadipour和Khajepour的研究中[19],电缆驱动的高电压研究了一种名为BetaBot的机器人。同样,Khakpour等人提出了一种差动式电缆驱动的并联机器人。[20]然而,无源连接的长度限制了这两个机器人的工作空间。基于Zhang和Gosselin的研究[21],Hassan和Khajpour提出了带有约束腿的混合缆索驱动并联机器人的动力学静力学模型[22]。串并联机器人的静力和刚度模型由Hu同样,由Mao和Agrawal提出了一种电缆驱动的臂外骨骼的工作空间优化和控制,并且由Lim等人研究了一种用于建筑物可重构系统的标准电缆驱动模块。
受上述串行并行操作器和CPM的启发,我们提出了一种新型的6自由度电缆驱动串行并行码垛机器人(CASPR)。 在本文中,提出了一种改进的算法来计算串并行有限自由度电缆驱动机械手的工作空间。 通过采用平行电缆,平行四边形机构和混合串并联结构,整个机器人的惯性大大减小,并且CASPR的工作空间增加。
这篇文章的结构安排如下:在“概念设计”部分,我们介绍CASPR的设计细节。 然后,在“反向运动学和静力分析”部分介绍CASPR的逆向运动学和静力学。确定工作空间的算法在“工作空间确定”一节中提出。 在“仿真结果与分析”部分,给出了一个简单的轨迹来验证运动学模型,并用上述算法详细计算和分析了不同载荷下CASPR的工作空间。 最后一节总结了这篇文章。
概念设计
如图1所示,CASPR是一种空间混合串行并行机制。 为了便于描述整个结构,CASPR通过移动平台分为下部和上部结构。下部结构主要由无源约束机构和四根平行的驱动电缆组成。被动约束机构由后臂,四根张紧索,两个旋转板和万向节组成。而且,后臂和张紧索具有相同的长度并且彼此平行。根据相互螺旋理论,被动约束机构相当于4SS / RUUR平行机构[26]上部旋转板具有两个垂直于后臂的平移自由度。移动平台安装在上部旋转板上,可以由四根电缆驱动绕轴3旋转。因此,下部结构具有三个自由度。底座中的齿轮减速器系统可以驱动下部万向节和下部旋转板,使它们围绕同一轴旋转(见图1(b))。然后,张紧索和后臂可以在支撑整个结构的同时将扭矩从底座传递到上部旋转板。此外,锚机模块的分布(参见图1(a))可以很容易地调整,底座的倾斜度可以向托盘倾斜alpha;度,以最大化工作区和货盘的交叉(见图1和图2)。
表1 六轴的运动范围
|
轴 |
范围 |
轴 |
范围 |
|
轴1 |
。1 2 frac12; 900; 900] |
Axis 2 |
。2 2 frac12; 900; 900] |
|
轴 3 |
。3 2 frac12; 450; 450] |
Axis 4 |
。4 2 frac12; 900; 900] |
|
轴 5 |
。5 2 frac12; 600; 450] |
Axis 6 |
。6 2 frac12; 10; 10] |
上部结构主要由变速箱和前臂。 变速箱固定在移动平台上,可以将上万向节和上回转板的输入转动转换为旋转滚筒和主动轴的旋转,主动轴驱动前臂绕4轴和5轴旋转。 轴3和4被设置为alpha;,并且前臂可以利用平行四边形机构约束与轴4平行的轴6。 在不考虑手腕的自由度的情况下,上部结构实际上是一种欠约束的2自由度混合缆索致动并联机构。 请注意,轴5上添加了一对扭转弹簧(见图1(c))以承受抓住时的向上力。
CASPR的新颖特征可以列举如下:(1)通过将致动器传递到地面并利用电缆来进一步减小结构的惯性;(2)模块化锚机可以很容易地重新排列以适应不同的任务;(3)与Behzadipour和Khajepour[19]和Khakpour等[20]的研究中的CPM相比,串行并行结构扩大了CASPR的工作空间; (4)与Lim等人研究中的电缆驱动臂相比,采用平行四边形机制使CASPR更适用于码垛。
逆运动学和静态分析
在本节中,介绍了CASPR的逆运动学和静力学模型。由于结构中约束串联的联合变量可以独立地描述机器人的结构,因此选择图1所示的六轴联合变量来描述机器人的结构。 为了便于讨论,下万向节和旋转板的两个被动旋转自由度被固定。表1中规定了六轴的旋转限制。
初始配置坐标系系统如图2和图3所示。全球坐标系O0 -X0Y0Z0位于固定工厂的中心。 Z0轴垂直于固定设备,Y0向前。 局部坐标系O 1 (X 1 Y 1 Z 1),O 2 (X 2 Y 2 Z 2),O 3 (X 3 Y 3 Z 3),O 4 (X 4 Y 4 Z 4),O 5 (X 5 Y 5 Z 5)和O 6 (X 6 Y 6 Z 6),分别连接到基座的斜面,后臂,上旋转板的底部中心,移动平台的中心,前臂和末端执行器的中心。注意,轴Z1和X1分别垂直于底座的斜面并平行于X0。 轴线Z2和Y2分别沿着后臂和轴线2。轴线Z3和X3分别垂直于上旋转板的底部并平行于X0。 轴线Z4和Y4分别沿着轴线3和O4O5。 轴线X5和Y5分别沿着轴线4和前臂。
逆运动学
下部结构和上部结构的示意图分别在图2和3中示出。 从基础到运动平台的正向运动转换可写为
其中Tij表示来自帧Oj和框架Oi的变换矩阵。
类似地,从移动平台到末端执行器的正向运动转换可写为
由于前臂中的平行四边形机构的约束,6T可以通过沿着轴线Y5的平移e,随后围绕中间的X 0轴旋转0.5,并且沿着中间轴线的另一个平移fY5。 5T可以表示为
图2.下部结构的示意图
图3.上部结构的示意图
其中
假设电缆连接点Ai(i= 1;2;3; 4)和Bi(i= 1;2;3; 4)分别位于固定植物和移动平台上具有RA和RB半径的虚拟圆上,与第i根电缆相关的向量回路方程可以表示为
其中是第i根电缆的矢量。 和是电缆连接点的位置矢量。 注意到这些矢量是根据框架O2给出的。 点B i和A i的位置矢量分别用O 4和O 0的均匀坐标表示和通过改变描述rBi代入框架O0,等式(4)可以写成
取方程(5)两边的点积得出
其中li表示第i根电缆的长度。
如图3所示,与电缆驱动前臂相关的矢量回路方程可写为
其中向量是从D点到C点的电缆矢量,和是电缆的位置矢量附接点和滑轮中心。 点C和D的位置矢量分别表示为O4和O5,均匀坐标为和。 通过将rD的描述更改为帧O4,电缆DC的长度可以类似地导出为
静态分析
整个结构的静态平衡方程可以写成
其中结构矩阵A是5times;6矩阵。 T是致动电缆和轴的广义致动力。 M是由应用于末端执行器的绞车导出的每个关节上的扭矩。[20]
等式(9)可以以块的形式写成
其中,
AU和AL分别是上部和下部结构的结构矩阵。 ML是M的3times;1子向量。三行分别对应于轴1,2和3。 ML需要通过代表四个拉索张力的TL来平衡,2;3; 4)在下部结构中。 类似地,MU是与轴4和5相对应的2times;1子矢量,并且TU由张力t5和由致动缆绳和活动轴分别产生的关节扭矩t6组成。 请注意,TL由末端执行器绞车和扭转弹簧产生的扭矩组成。
由于在所提出的浮轴的结构中,结构矩阵不能像传统的CPM那样相对于单一的框架推导出来。为了导出下部结构AL的结构矩阵,我们需要重新组合结构矩阵,相对于帧O1和O4得出。 关于帧O1和O4的结构矩阵可以写成
其中是根据框架Oj写成的第i根电缆的单位螺钉。和分别表示电缆连接点Bi和第i个电缆矢量的位置矢量。 从等式(5)可以得出结论
其中和分别表示从帧O0到帧Oj以及从帧O0到Oj的变换。
由于后臂绕轴线X1的旋转禁止轴2与框架轴线Y1一致,因此需要调整为
图4.所提算法的流程图
重组的前两行分别对应于轴X1和调整轴Y1,以及最后一行对应于轴Z4,下部结构矩阵写为
类似地,关于帧Oj的上部结构矩阵可以被推导为
其中是有线CD的单元螺丝。 aM =是有效转矩t5的映射矢量。
通过绕轴X5旋转0.5来调整,它会产生
然后,上部结构的结构矩阵可以是通过删除第三行获得
工作区确定
确定CASPR工作空间的修改方法在本节中构建。 CASPR的静态工作空间被定义为满足静态平衡条件的所有位置,并且电缆(接头)中的所有张力(toques)也在可接受的限度内。 一般来说,条件可以表示为
和
其中和分别是致动力的下限和上限。
表2 仿真和三维建模中使用的机器人规格
产品规格/mm
图5.追踪给定轨迹时3D模型运动的模拟
类似于由Bouchard等人提出的可用扳手组,12可用扭矩组(ATS)被定义为机器人可以在其关节上产生的一组扭矩。 从方程(19)和(20)可以看出,ATS可以描述为
其中,仿射图将单位超立方体{a}转换为ATS。 ATS是所有可能由致动器
全文共6680字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11165],资料为PDF文档或Word文档,PDF文档可免费转换为Word

