英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
离散元法在粮食采后作业建模中的应用
作者:约瑟芬·博阿克,金斯利·安布罗斯,马克·卡萨达,罗纳尔多·马吉朗,德克·迈尔
摘要
谷粒是有限的离散材料。虽然流动颗粒有时可以表现为连续体流体,但晶粒所表现出的不连续行为不能仅通过传统的基于连续体的计算机建模来模拟,如有限元法或有限差分法。离散元法(DEM)是一种行之有效的数值方法,它可以通过跟踪单个粒子的运动来模拟颗粒等离散粒子。DEM已广泛应用于岩石力学领域,在谷物采后作业中也越来越受欢迎,但尚未广泛应用在谷物采后作业的领域中。在本文中,回顾了DEM在谷物采后作业中的应用现状,通过参考DEM模拟谷物采后加工的文献,综述了在大豆、玉米、小麦、大米、菜籽等谷物的处理和加工中的应用,以及谷物辅制品蒸馏产品中含有可溶物的干燥谷物(DDGS)的应用,还包括在自由流动和受限流动条件下涉及颗粒的谷物干燥模拟。通过对已有文献的回顾表明,DEM是研究可变形软粒子(如颗粒和副产品)行为的一种很有前景的方法,并可从这些复杂形状颗粒的改进粒子模型的发展中获益。
关键词:离散元法、粮食装卸、粮食加、工自由流动颗粒、约束晶粒
绪论
谷粒被认为是有限的、离散的材料。流动的颗粒有时可以表现为一种连续流体或单个相互作用粒子的集合,这在很大程度上取决于赋予谷物颗粒的能量[21]。颗粒材料,如谷粒,表现出不连续的行为,不能仅仅用常规的基于连续体的建模技术来模拟,如有限元法或有限差分方法。由不连续体行为主导的过程的实例有很多,其中包括料斗、进料器、滑槽、筛子、破碎机、球磨机、混合器和输送系统中散装固体的流动。特殊介质的微观力学行为、地下矿山洞口的稳定性、岩石边坡的稳定性以及矿物处理是其他固体处理或加工实例,在这些例子中,连续体理论可能并不适用[24]。
Williams等人[100]描述了离散元法(DEM)以数值求解解决离散元素(如晶粒)的问题。DEM属于一系列数值模拟技术,旨在解决工程和应用科学中表现出不连续行为的问题[24, 41, 42]。DEM可以分析发生旋转和大位移的多个相互作用的、可变形的、不连续的或者破碎的物体。DEM中的基本假设是每个离散元素都有不同的边界,从而在物理上将其与分析中的每个其他元素分开。弹性力学基本方程是在惯性系下写成的,然后转移到一个非惯性系,即平移和旋转的非惯性系。这样,对于非惯性系中的观测器,即新框架中的观测器,物体就不会出现平均平移或旋转,然后将变形与平均运动解耦,并将其写为物体正常模态之和,进而给出一组新导出的解耦模态方程。这些方程是在逐个单元的基础上应用的,各单元通过边界力相互作用.然后用显式中心差分格式求解解耦方程,并用模态叠加法求得最终解[100]。
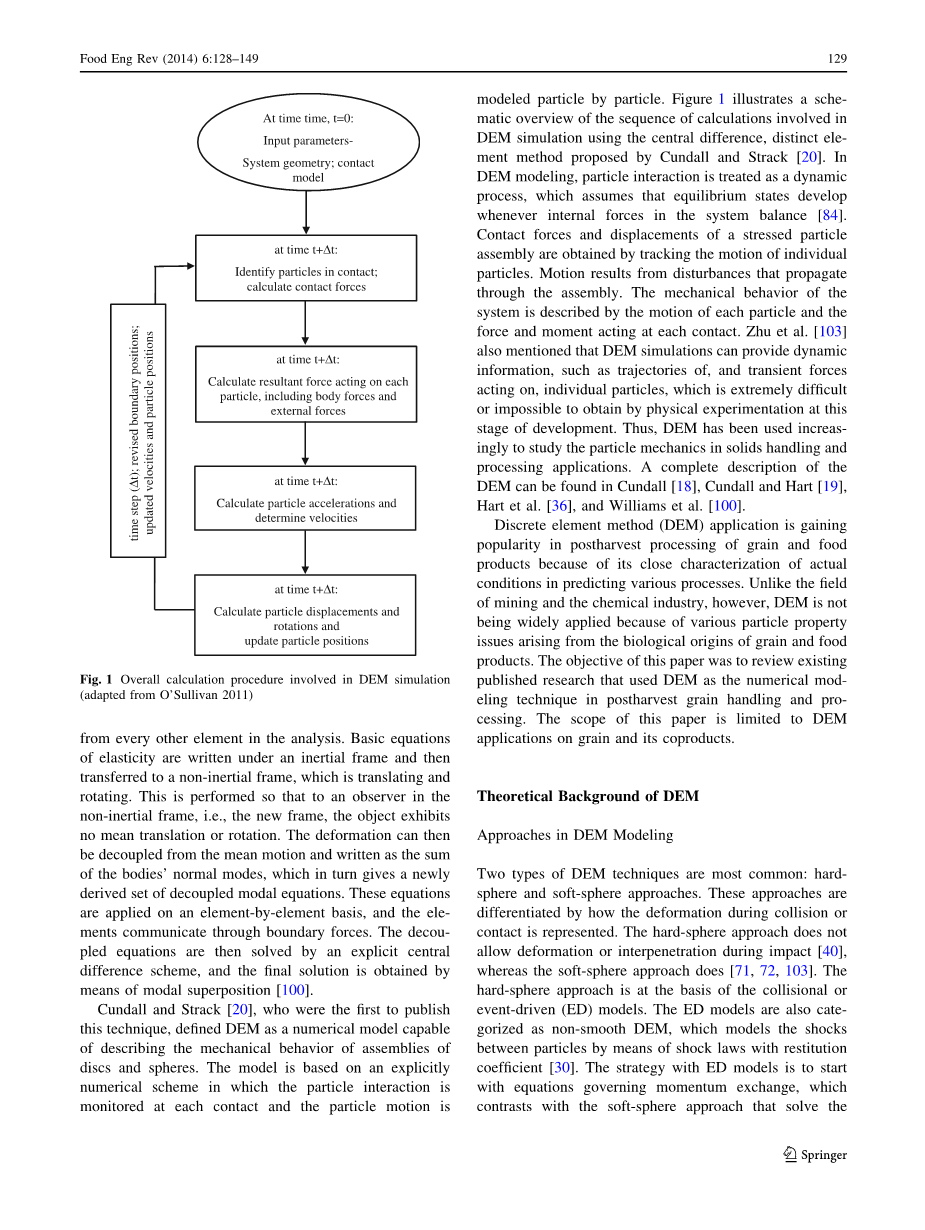
Cundall和Strack [20]是第一个发表这项技术的人,他们将DEM定义为一个能够描述圆盘和球体组件的机械性能的数值模型。该模型建立在一个显式数值格式的基础上,在每个接触处监测粒子的相互作用,并且用粒子模拟颗粒的运动。图形1为使用Cundall和Strack提出的中心差分、离散单元法进行DEM模拟中所涉及的计算顺序的示意图[20]。在DEM模型中,粒子相互作用被看作是一个动态过程,它假设在系统平衡是,平衡态随时都会发生[84]。通过跟踪单个粒子的运动获得受力粒子组件的接触力和位移。运动是由通过组件传播的扰动产生的。系统的机械性能由每个粒子的运动和作用于每个接触点上的力和力矩来描述。Zhu等人[103]还提出DEM模拟可以提供动态信息,例如单个粒子的轨迹和作用在粒子上的瞬时力,在这个发展阶段,通过物理试验极难或不可能获得这些信息。因此,DEM被越来越多地应用于固体处理和加工应用中的颗粒力学研究。关于DEM的完整描述可以在Cundall[18],Cundall和Hart[19],Hart等人[36]和Williams等人[100]的著作中查到。
图1 DEM模拟中涉及的总体计算程序(改编自O#39;Sullivan 2011)
离散元法(DEM),由于其在预测各种过程中的实际情况具有较好的特性,在谷物和食品加工中的应用越来越广泛。然而,与采矿和化学工业领域不同,由于谷物和食品的生物来源所产生的各种颗粒性质问题,DEM并没有得到广泛的应用。本文的目的是回顾现有的使用 (DEM)作为粮食采后处理和加工的数值模拟技术的研究成果。本文的研究范围仅限于DEM在粮食及其副产品中的应用。
1.DEM的理论背景
1.1 DEM建模的方法
最常见的DEM技术有两种:硬球法和软球法。这俩种方法的区别在于碰撞或接触过程中变形是如何表示的。其中硬球法不允许在撞击过程中发生变形或相互侵彻[40],而软球法[71, 72, 103]则允许。硬球法以碰撞或事件驱动(ED)模型的基础,ED模型也被归类为非光滑DEM模型,该模型利用具有恢复系数的冲击定律来对模拟粒子间的冲击[30]。ED模型的策略是从控制动量交换方程开始,这与软球法求解碰撞或接触粒子的直线运动和角运动方程形成了鲜明对比[72]。在硬球法中,数值求解的时间步长随每次碰撞之间的时间变化而变化,相反,软球法在数值求解中使用恒定的时间步长。
ED方法仅限于圆形或球形粒子,只考虑了两个碰撞粒子之间的碰撞或冲击,并不考虑多个粒子之间的接触[30]。在处理一系列瞬时碰撞时,每次只发生一次碰撞,往往没有明确考虑粒子之间的作用力[103]。因此,硬球法或ED方法在快速颗粒流模拟中通常是最有用的。在快速颗粒流模拟中,由于颗粒材料是部分或完全流态化的,所以颗粒材料并不致密[72]。硬球法在计算上很便捷,因此,对于非稠密流动来说,它可能是首选的方法。然而,Delaney等人[22]认为这种方法虽然在计算上更快,但在描述密集物质涉及多个同时接触的反应的细节方面却不够。
Fortin等人[30]在非光滑接触动力学(NSCD)的基础上开发了一种改进的非光滑DEM。NSCD方法利用库仑单边接触定律模拟了干摩擦颗粒之间的接触,并考虑了粒子间的多重接触和冲击[50]。Fortin等人[30]改进之后的NSCD,克服了使用Coulomb定律模拟干摩擦时出现的困难,后者通常是不相关的(即在接触过程中,滑动矢量与摩擦锥不正常)。他们使用了双势理论,这导致一个快速预测校正方案,只涉及一个正交投影到摩擦锥上,并允许使用一个基于本构定律中的误差估计的收敛准则。根据Olsquo;Sullivan[72]接触动力学方法在硬球或软球方法下并不严格遵循硬球或软球方法,它们有时被称为刚体动力学。
Cundall and Strack [20]最初开发了软球法,这是在文献中发表的第一个离散数值模拟技术。软球法中的粒子也是刚性的,但允许它们在接触点重叠,作为接触点[71, 72, 103]变形的表现形式。这些变形用于计算粒子之间的弹性、塑性和摩擦力;粒子的运动用牛顿运动定律来描述。软球模型的主要优点是它们能够处理多个粒子接触,这在模拟准静态系统时很重要[103]。
Campbell[7]也强调了软球法在模拟致密相块体颗粒材料方面的优势。他强调散装的致密粒状材料(与流态化或稀释相相比)是软的,因为它们的声速比其组成固体材料慢大约50倍,而且块体的表观弹性模量比其组成固体小三个数量级以上。他补充说,密集系统通过力链相互作用(一种支撑材料内的大部分内应力准线性结构),并通过弹性变形粒子间接触来传递力。对诸如刚性球体和任何其他模型这样的系统建模都会错过必要的物理学[7]。他还提到颗粒表面摩擦对于模拟稠密系统是必不可少的,因为去除摩擦将会导致弹性和惯性流动之间的过渡。表面摩擦对力链的强度很重要,而力链对弹性流动状态也是至关重要的,因此,为了避免错误的行为,摩擦力也是模拟中必不可少的物理条件。
软球法具有上述描述块状材料物理的优点,是谷物和食品加工业中最常用的方法。因此,软球DEM建模是本文研究的重点。
1.2 运动控制方程
在软球DEM中,通过使用显式数值格式和很小的时间步长跟踪每个粒子的运动来计算粒子组件的接触力和位移[20]。这个过程使用牛顿运动定律,给出了粒子运动和作用在每个粒子上的力之间的关系。粒子的平移和旋转运动定义为[78]:
g (1)
(2)
其中
,,, 和分别表示质点的质量、半径、线速度、角速度和转动惯量;
,和分别表示作用在粒子上的法向力、切向力和扭矩;
表示接触点;
g,t分别表示重力加速度和时间。
1.3接触力建模
接触点处的力-位移规律可以用不同的接触模型来表示。本文未对各种接触模型及其相应的方程进行详细的讨论。Zhu等人[103总结了各种接触力模型以及离散粒子模拟中使用的非接触力模型。O#39;Sullivan [72]在她的书中也详细讨论了接触模型。
通常使用的最简单的接触模型是线性弹簧-缓冲器模型[20],其中弹簧刚度假定为常数[69]。采用赫兹理论来获得接触的力变形关系(例如,非线性弹簧模型)对线性接触模型进行了改进。与线性接触模型不同,赫兹接触定律考虑了法向刚度随重叠量的变化,这种方法已推广到碰撞物体容易变形(约束塑性变形)的情况。接触相互作用的数值模型涉及力-变形方程,并且该方程通过阻尼项来反映接触区的耗散。
一种表示接触力-位移规律的模型是Hertz-Mindlin接触模型[25, 26, 67, 68, 87]。这种模型将赫兹理论与Mindlin模型在法向和在切向上的结合,既具有精确性,又具有简单性[78, 87]。颗粒在接触点处的力包括接触力和粘性接触阻尼力[102],这些力是通过假定在正常情况下存在,通过弹性弹簧和仪表盘来计算的和切线(t)的方向。
2.颗粒模型:颗粒及其辅助产物
在模拟、接触检测和接触力计算过程中,粒子模型形状的表示方式选择对真实粒子行为的准确性至关重要[28,29]。最早的粒子模型是二维和圆形或多边形的[92]。后来的发展将表示方式扩展到三维(3d)形状,即使用球体[17],多面体[18, 38],椭圆体[86],超级二次函数[39, 99],多元非球形粒子[28]和结合粒子[65, 74]。虽然接触型式和计算时间非常重要,但是建模的关键目标还是精确模拟真实粒子组装的行为[28]。Favier等人[28]还提到,颗粒形状对预测行为的影响比形状与接触检测效率之间的关系记录得少,但使用等高线形状的粒子模型除外[31, 36]。在下面的章节中,开发并使用颗粒模型来预测谷物的处理和加工行为,并分别对它们进行了探讨和总结。
2.1大豆
大豆是世界各地生产的主要油籽之一,与任何其他农业粮食一样,大豆及其产品的特性取决于原产地和加工方法。在过去20年中,大豆的处理系统和加工操作一直被人们模拟研究,以优化加工工艺过程。LoCurto等人[60]使用大豆的粒子模型,该模型由四个半径相等的球团组成,中心位于同一平面上,这与Favier等人[28]的非球形粒子的表示法类似,均由重叠的球组成,其中心相对于粒子对称的主轴固定在彼此相对于一个位置。采用三维四球粒子模型模拟了单颗大豆核在铝、玻璃、丙烯酸等表面的行为,并对其恢复系数进行了测量。仿真结果准确地预测了恢复系数。Vu-Quoc等人[91]在Favier等人[28]提出的多球方法的基础上,建立了大豆颗粒模型并预测大豆在干槽中的干燥颗粒流。
大豆类似于一个平均球形度值高于0.8的球体[48],因此,为了减少计算时间,大多数研究人员使用单个球来模拟大豆的特性。Li等人[55]利用二维DEM模拟方法,模拟了大豆和芥菜种子的颗粒的分离过程,并将其建模为圆形圆盘,他们使用线性弹簧模型,并通过进行试运行来修改代码,选择了合适的时间步长。同时,假设两种颗粒的粒度都是均匀的,还用一组具有筛线特性的圆形粒子对丝网进行建模,这些粒子是用来模拟筛网的运动。作者发现,在一个筛选过程中,两种球形粒子模型是足够的,DEM模拟可以为最有效的筛选操作提供临界进料率。Boac等人[4]使用单球粒子模型来模拟批量大豆性能测试,使用商业DEM代码EDEM(DEM Solutions, Ltd., Edinburgh, UK)。研究人员使用一种无滑移的再接触模型来模拟测量试验的体积密度和角度。他们建立了一个粒子模型,其具有回归系数、静态摩擦系数、滚动摩擦系数、颗粒尺寸分布和颗粒剪切模量的参数组合最符合文献中现有的属性值。利用了所建立的大豆颗粒模型,对具有不同内在特性的两批大豆在桶式谷物提升机开机系统中进行了模拟[5]。
2.2大米
大米:水稻的椭球形状与小麦相似,但由于大米中没有折痕,所以更容易近似于大米颗粒的形状。Sakaguchi[81]等人使用了二维圆形圆盘法通过自己的DEM代码模拟稻谷的摇动分离的过程[80],模拟结果与实验得到了很好的一致性,对稻谷组分的波状行为和水稻的宏观分离行为研究获得了很好的一致性。Markauskas和Kac ˇianauskas [62]通过了使用11个球创建一个椭球来模拟米粒,他们用自己的DEM程序比较了两个碾压摩擦系数分别为0和0.3的稻谷颗粒模型[52]并用这些粒子模型模拟了颗粒的填充、排放流动和堆过程。发现具有滚动摩擦力的颗粒模型产生的桩型能更好地与实际桩相吻合。相反,不具有滚动摩擦的粒子模型则显示出较高的颗粒迁移率,导致颗粒的扩散而不是一堆。蒋和邱[51]二人采用了7球粒子模型来模拟稻谷的冲击行为。米粒模型是一个椭球体,具有3.5毫米的半长轴和1.8毫米半长轴,作者在EDEM软件中建立了这种水稻模型,并研究了稻谷颗粒对倾斜顶头撞击板的影响。通过模拟预测得出的实验结果精度较高,达到一定质量。李等人[58]也建立了水稻三维模
全文共8520字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1666]

