英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于系统分解的多级控制液压机
摘要 - 本文提出了一种新颖的基于系统分解,多层次控制方法来控制的复杂系统--液压机系统。 这个提议中的关键思想方法是将系统复杂性分解为一组简单的子系统,并且控制任务由一个组共享简单的子控制器。 首先,复杂的非线性系统是根据分解成一组简单的子系统过程知识,每个子系统都很容易控制由一个简单的子控制器。 然后,一个序列控制策略开发用于帮助这些子控制器处理耦合子系统之间。 最后,所提出的方法被应用于控制一台实用的液压机并与之比较传统的比例积分微分控制。
关键词:液压机 多级控制 过程控制 系统分解
- 介绍
液压机是国防,航空运输和能源运输行业的关键设备,提供理想的锻造性能【1】。 高质量锻造生产的关键要求是获得单个液压缸的满意的跟踪性能并保持工作平板的水平状态,这需要所有液压缸之间的高效同步。但是,由于不同的驱动,系统和液压缸的特性,如不均匀的载荷分布,时变的摩擦和干扰以及制造误差,这种同步是难以获得的。此外,锻造过程具有复杂的非线性性质,且具有模型不确定性,所有这些困难都会对高品质锻造性能带来挑战。
有许多方法对液压机的控制有所贡献,例如比例积分(PI)控制【2】,迭代学习控制【3】和滑动模式控制【4】。 然而,由于这些方法只针对简化的线性模型而较少考虑模型不确定性的补偿,所以它们不能在复杂的非线性锻造过程中获得令人满意的性能。 因此,应开发一种有效的控制方法来控制复杂的非线性锻造过程。
液压机控制中的关键问题是要补偿模型不确定性的影响。在过去的几十年中,已经研究了许多补偿策略以通过过程数据获得不确定性信息。常见的补偿是基于观察者,例如滑动模式观测器【5】,【6】和扰动观察器【7】,【8】。但是,这些方法仅在本地工作点有效。为了更好地补偿大型工作区域,努力地致力于非线性系统的建模,如径向基函数神经网络(NN)建模【9】,Takagi-Sugeno(T-S)模糊模型【10】-【13】,分段模型【14】,【15】,子域智能建模方法【16】和变结构多模型估计【17】。这些非线性建模方法的优势在于它们可以将复杂的建模任务分解为一组简单的本地任务,以便它们可以在大型工作区域中正常工作。然而,据我们所知,这些方法从未被用于补偿液压机中模型不确定性的影响。
另一个关键问题是具有模型不确定性的复杂非线性液压机的运动控制策略。近几十年来,许多作者对复杂非线性系统的运动控制作出了贡献。运动控制的一个重要控制方法是变结构控制【18】,【19】。另一个重要的控制方法是可变结构控制和其他智能controlmethods,例如混合,模糊监控滑模和NN控制【20】,健壮的基于NN-滑模方法【9】,和T-S基于模型的滑动模式控制【21】。此外,许多智能方法也被开发用于运动控制,例如动态结构神经模糊网络【22】,神经控制【23】和自适应鲁棒控制【24】。虽然这些控制方法可以达到最佳性能,但这些控制方法设计的控制器往往非常复杂,使得它们不容易实现复杂的液压机。因此,难以直接应用这些控制方法来控制复杂液压机。然而,如果液压机的复杂性可以降低,那么通过这些控制方法获得的控制器的复杂性可以降低,使得该控制器将简单且容易实现。因此,应该开发一种有效的方法来降低液压机的复杂性,以使控制器简单易行。
负载
传感器
固定平台
工作板
液压缸
控制器
液压驱动系统
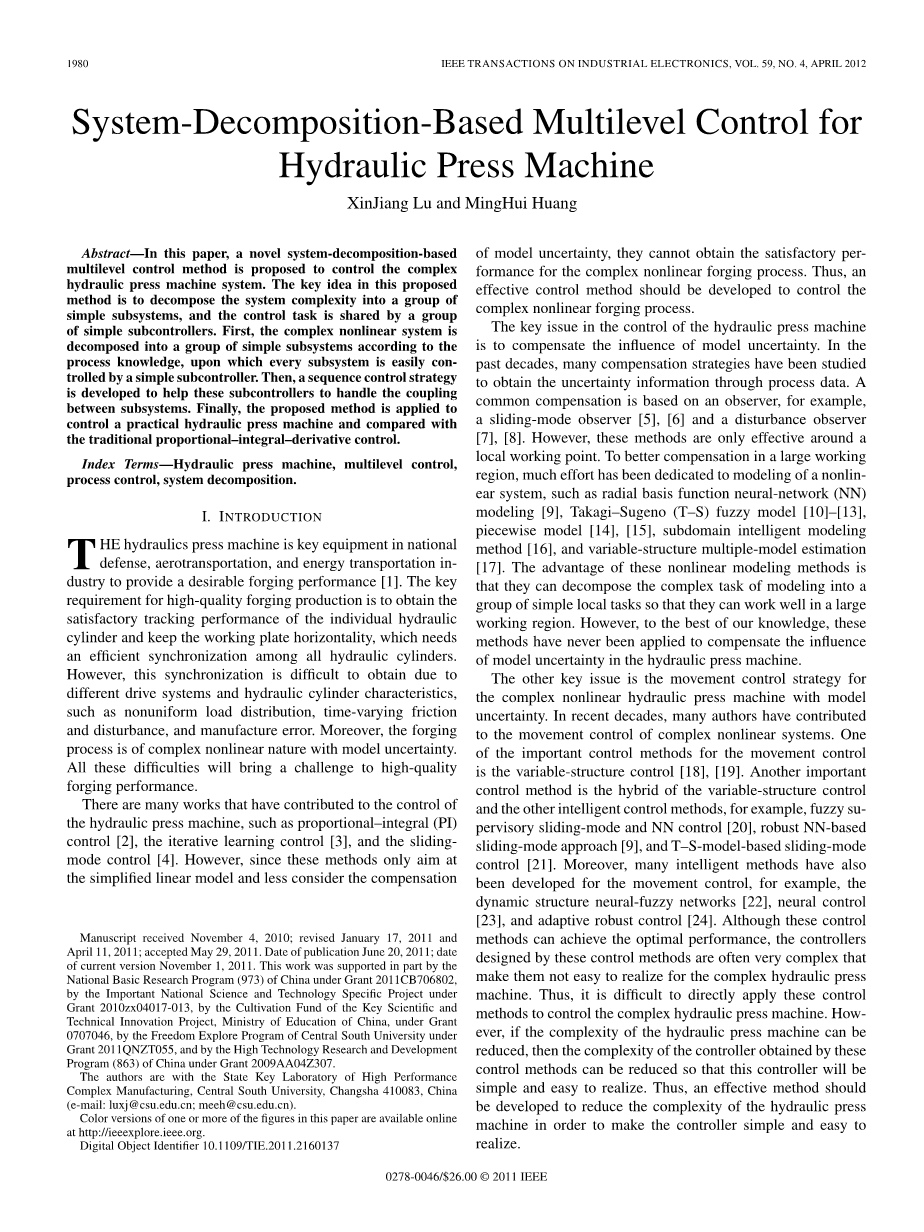
图1. 液压机系统
本文提出了一种新的基于系统分解的多层次控制方法来控制复杂的液压机系统。 首先,根据过程知识将这个复杂系统分解为一组简单的子系统,每个子系统由一个简单的子控制器控制。 然后,开发序列控制策略来帮助这些子控制器处理子系统之间的耦合。 由于每个子系统都存在模型不确定性,因此提出了一种基于NN建模的混合控制方法作为控制其相应子系统的子控制器。 最后,所提出的方法被用于控制实际的液压机,并与传统的PI-微分(PID)控制进行比较。
II.过程描述和问题陈述
所研究的液压机系统如图1所示,该系统使用液压系统(包括泵,阀,管道和缸体)来驱动工作板的上下运动并提供所需的锻造力。 需要一个单独的控制系统来调整液压系统的每个伺服阀以改变工作板的速度。 目标是设计控制器以获得令人满意的跟踪性能并保持工作盘水平状态。
力分析图如图1所示。根据牛顿第二定律和角动量守恒,工作板的力模型可以推导为
其中Fi是液压系统提供的驱动力,M是工作板的质量,Fr是未知力,例如摩擦力,R是未知负载力,xc是重心的位置, 工作板lmi和lni(i = 1-4)分别是从Fi接触点到m轴和n轴的力矩臂,Mrm和Mrn分别是关于m轴和n轴的Fr角动量矩 ,MRm和MRn分别是R围绕任意n轴的角动量,Jm和Jn分别代表工作板围绕m轴和n轴的转动惯量,theta;m和theta;n分别代表围绕m轴和n轴 旋转的角度。 sigma;mi和sigma;ni是符号因子。 如果工作盘围绕m轴顺时针旋转,则sigma;mi= 0; 否则,sigma;mi= 1。如果工作盘沿着顺时针方向旋转
n轴,那么sigma;ni= 0; 否则,sigma;ni= 1。
液压缸的力模型通过如下公式来表示:
其中Pi是压力,Ai是面积,mi是质量,BP是粘滞阻尼系数,xi是第i个液压缸的排量,Ct是泄漏系数,V0是初始体积,beta;t是弹簧 媒体的时刻。
根据流量守恒,伺服阀的流量方程可表示为:
其中Qi是流量,Cd和w是已知系数,Ps是源压力,Pi是气缸i的腔室中的压力,Kv和Ka是放大器和伺服阀的增益,rho;是密度,以及 ui是控制输入。
根据流动的惯性效应,管道中的流动方程可表示为:
其中Poi是入口位置的压力,li和Dh分别是管道的长度和半径,Qvi是流量,Si是管道的横截面积,而vi是流量。
从(1) - (10),锻造过程模型可以表示为:
其中:
为简单起见,过程模型(11)可以重写为:
其中:
是模型不确定的。
从过程模型(12)可以清楚地看出,这种液压机系统是一个具有耦合和模型不确定性的复杂非线性系统,这将导致所有液压缸的坐标控制困难。 而且,找到全球最优控制器是很困难的,即使可以发现,它也会非常复杂,因此不容易实现。 因此,应开发一种有效的控制方法,以获得令人满意的跟踪性能并保持复杂液压机的工作平板水平。
低水平
高水平
子控制器n
子控制器1
耦合
子系统n
子系统1
复杂系统
图2.基于系统分解的多控制器方法
子控制器1
子系统1
输出
设定点
与后续的级别耦合(未知)
与以前的级别耦合(已知)
图3.子系统控制策略
III 方法
如果复杂的非线性系统可以分解为一组简单的子系统,那么完善的控制方法对设计这些子系统仍然有效。 因此,提出了一种新的基于系统分解的多层次控制方法,如图2所示,主要包括以下几个关键步骤。首先,根据工艺知识将复杂非线性系统分解为一组简单的子系统。 然后,每个子系统可以由子控制器控制,例如,子控制器1控制子系统1.由于子系统简单,其相应的子控制器可以简单且容易实现。 这种方法的优点是系统复杂度被分解成许多子系统,控制器任务也被一组简单的子控制器共享。 因此,它可以很容易和有效地达到复杂非线性系统的令人满意的性能。
这个方法中的关键问题是如何处理子系统之间的耦合。提出了一种序列控制策略来帮助这些子控制器处理这些耦合,其中所有的子控制器都是按照给定的顺序(从高到低)设计的,如图2所示,比如子控制器1的第一个设计其次是子控制器2的设计,直到子控制器n的设计。现在我们将以图3中的子控制器i的设计为例来说明如何处理来自其他子系统的耦合影响。在子控制器i的设计中,来自所有先前级别的耦合是已知的,因为之前的所有子系统已被精确控制,并且来自所有后续级别的耦合未知。然后,我们将来自所有后续级别的耦合视为子系统i的输入。下面的任务是设计子控制器i来跟踪给定的参考信号。获得令人满意的跟踪性能后,子系统i的所有输入都是已知的。这些已知的输入将被视为其后级对应子系统的参考信号。就这样提出的序列控制策略可以有效地处理耦合。
子控制系统1
子控制系统2
子控制器2
子控制器1
图4.基于系统分解的两层控制策略。
设计步骤可以描述如下:
步骤1)设计最高级别的子控制器,即子控制器1.因为全部联轴器来自后续级别,所有这些联轴器都是未知的并视为其投入。然后,设计子控制器n以使子系统n到达具有令人满意的跟踪性能。控制之后,所有的输入都是已知并被视为其相应子系统的参考信号在随后的水平。
步骤2)从子控制器2到子控制器n-1的设计,这与子控制器的设计
步骤3)设计最低级别的子控制器,即子控制器n。因为所有联轴器来自以前的水平,所有这些联轴器都是已知的。主要的任务是设计子控制器n使子系统n具有满意的效果跟踪性能。由于系统复杂度和控制任务是共享的由一组简单的子控制器,这个提出的系统分解为基础多级控制方法可以有效地控制复杂系统通过一组子控制器的合作。
IV。 基于系统分解的液压机多级控制方法
根据工艺知识,液压机系统的模型(12)可以分解为两个简单的子系统:
基于所提出的基于系统分解的多级控制方法的思想,提出了一种新型的两级控制方法,如图4所示,其中子控制器1(也称为一级控制器)和子控制器2也称为作为二级控制器,分别设计为控制子系统1和子系统2。控制顺序首先是子控制器1的设计,然后是子控制器2的设计。当控制子系统1时,来自子系统2的耦合项P可以被认为是子系统1的输入,并且使用伪输入Pr来代替P在通过子控制器1的设计获得满意的子系统1的跟踪性能后,输入Pr已知并被视为子系统2的参考信号。然后,设计子控制器2以使子系统2跟踪参考信号Pr,其中是一种典型的跟踪控制。因此,由于系统复杂度由两个简单的子控制器共享,因此所提出的控制方法可以容易且有效地控制复杂的非线性系统。
子系统1
子系统2
NN模型
不确定估计
子系统1
反馈控制器
鲁棒控制器
前向控制器
图5.一级控制策略
A.一级控制的设计
由于在子系统1中存在模型不确定性Delta;f,因此如图5所示,提出了一种基于NN建模的混合控制策略来控制子系统1.在该提出的控制策略中,NN模型首先用于估计模式不确定性Delta;f,其上使用反馈控制器来控制系统模型的已知部分,包括名义模型和NN模型。 然后,使用前向控制器来促进高速响应[8]。 由于仍然存在建模误差和外部干扰,因此使用鲁棒控制器来抑制其影响。
- 反馈控制:由于子系统1中存在模型不确定性Delta;f,因此首先使用NN模型来估计该模型不确定性 其中phi;是基函数,gamma;是权重,并且k是基函数的数量。 有许多成熟的方法[9],[20],[23]通过输入输出数据来训练这个NN模型。
在获得NN模型(14)之后,子系统1可以被重写为
其中ε=Delta;f - Delta;〜f是建模误差
基于过程模型的已知部分A2X2 B(gamma;0 B1P) Delta;〜f,反馈控制可以设置为
其中BB1·inv(BB1)= I。
- 正向控制:如果跟踪误差根据给定的速度速率趋向于零,则是理想的。 这里给出下面的速率:
其中e(t)= r-X1是跟踪误差,C2和C1是由给定的速度速率决定的系数,C2是对角正矩阵。
为了获得满意的跟踪速度,正向控制设置为:
- 鲁棒控制:由于子系统1仍然存在建模误差ε,因此开发了一种变结构控制器来保证系统的稳定性和鲁棒性。
将滑动模式曲面定义为:
为了获得令人满意的鲁棒性能,鲁棒控制设置为:
其中beta;= [beta;1sgn(s1,1)...beta;nsgn(sn,n)] T,[beta;1...beta;n] T是建模误差ε= [ε1·...εn] T的界限,εI| le;beta;i,和
定理1:考虑具有模型不确定性的子系统1.给定反馈控制(16),正向控制(18)和鲁棒控制(20),如果一级控制设置为:
子系统1稳定,可以获得满意的跟踪性能。
证明:见附录A.
B:二级控制的设计
在一级控制器的设计之后,伪输入Pr是已知的并且被认为是子系统2的参考信号。因此,设计子控制器2使子系统2跟踪参考信号Pr,其中类似于设计 一级控制器,如图6所示的混合控制策略被提出用于控制子系统2.NN建模首先用于近似子系统2中的模型不确定性Delta;gi,在此基础上开发反馈控制器以设计已知模型 部分。 正向控制器用于调整跟踪速度。 最后,使用鲁棒控制器来抑制建模错误
全文共7337字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11693],资料为PDF文档或Word文档,PDF文档可免费转换为Word

