英语原文共 23 页,剩余内容已隐藏,支付完成后下载完整资料
一篇关于AGV小车系统的控制和设计的评述
作者:Tuan Le-Anh *, M.B.M. De Koster
RSM Erasmus大学,P.O. Box 1738, 3000 DR 鹿特丹港市,荷兰
摘要:
这篇文章文章介绍了有关AGV小车系统控制和设计的评述。我们解决了很多要点问题包括:路径导航,车辆需求确定、车辆调度、怠速车辆定位等,电池管理、车辆路由和死锁解决。我们从主要出版物文献中讨论和分类重要的模型和结论,包括经常被忽视的领域,如闲置车辆定位和电池的结果管理。此外,我们提出了一个新的调度规则分类,一个自动化的设计和控制框架指导车辆系统,并提出一些富有成效的研究方向。
2005 Elsevier B.V. 保留所有权利。
关键词:车内运输,自动导引运输车,文献综述。
1.引言:
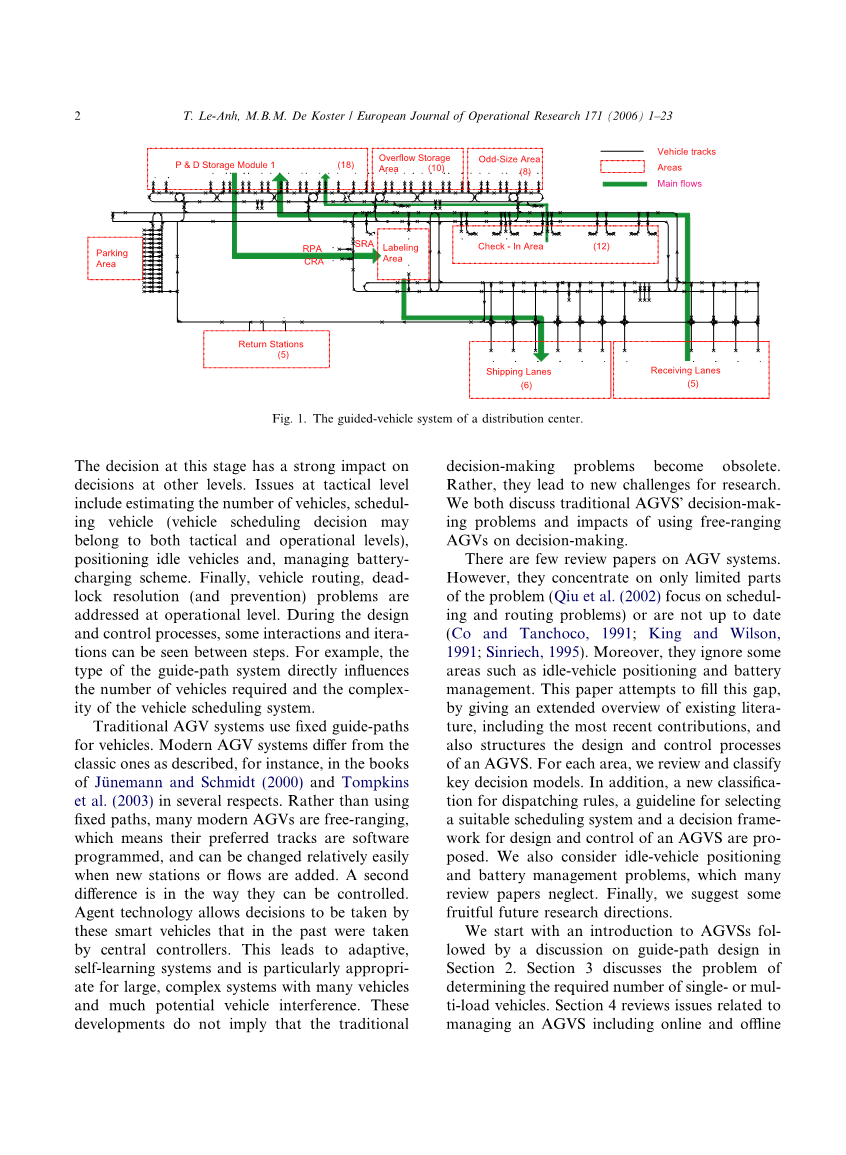
基于车辆的内部运输系统使用自动导引车(AGV)常用于制造工厂等设施,仓库、配送中心和转运终端。它们被称为自动化引导车辆系统(AGVSs)。图1给出了配送中心的计算机硬件和软件中的AGS的例子(De Koster et al.,2004),在这当中AGV小车装载地点比如说从输送线路到存储线路,再从存储线路到运输线路。AGVs的设计和控制过程存在很多问题。其中主要的问题有导轨设计,估计数所需车辆(或确定车辆要求),车辆调度,怠速车辆定位,电池管理,车辆路由和死锁的处理。它们属于不同的级别决策过程。引导路径设计可以看作是在战略层面上一个问题。
图1
这个阶段的设计决定对其他级别的决定有很大的影响。战术层面的问题包括估计车辆数量、调度车辆(车辆调度决策属于战术级和操作级),定位闲置车辆,蓄电池的充电管理方案。最后,车辆路径、死锁解决(和预防)问题是在操作层级别的处理。在设计过程中和控制过程,一些交互和迭代在进展过程中可以看到。例如,导轨系统的类型直接影响所需车辆数量及复杂程度车辆调度系统。
传统AGV系统采用固定导轨。在一些(文献)描述中现代AGV系统不同于经典,比如说在Juuml;nemann and Schmidt (2000) and Tompkinset al. (2003)等书中的一些方面。许多现代的AGVs是自由的范围,而不是使用固定的路径,这意味着他们首选的轨道是软件。这样就更加程序化,而且可以相对容易地改变。添加新站或流量路线。第二个不同之处在于它们可以被控制。代理技术允许那些过去由中央控制器采用的决定被这些智能车采用。这就导致了适应性、自学系统的发展这尤其适合有许多车辆的大型复杂系统和潜在的车辆干扰。这些发展并不意味着老的决策系统的问题被废弃。而是产生了新的科研挑战。我们都在讨论传统AGV的决策使用自由测距的问题及影响AGV的决策。
目前很少有关于AGV系统的综述性论文。然而他们只关注有限的问题(邱等人关注调度和路由问题)或是论文过于老旧(CO和坦乔科,1991;王和Wilson,1991 sinriech,1995)。此外,他们忽略了一些领域如闲置车辆定位和电池管理。本文试图填补这一空白,通过对现有文献的概述,包括最新的贡献,以及有关AGVS设计结构和控制过程。我们还考虑那些很多评述文章经常忽略的怠速车辆定位,还有电池管理的问题。最后,我们建议一些富有成果的未来研究方向。
我们通过AGVSs介绍开始并伴随着道路选择设计第二部分第三部分谈论需要多少单载或是多载车数量问题。第四部分有关AGVS相关问题如在线或不在线行程安排,车辆调度,闲置车辆定位,电池管理车辆导航以及死锁问题解决。第五部分通过一个决策框架展示了有关AGVS的设计和控制过程。最后,第六部分我们作了总结并为以后的研究确定了主题。
- 路径引导设计:
道路引导设计是AGVS设计和控制中一个重要的问题。是第一个需要考虑的问题。很多已经发表的道路引导设计表明设施布局和接受发送(P/D)站点是固定确定的。主要问题是决定要包含在解决方案中的连接或引导路径段。在某些情况下,连接的平行车道数也要确定。这个优化问题还需要设备部门之间的物质流。这个信息是用来建设对引导系统很重要的“从–”流程图。在网络流模型中,车辆引导路径通常表示为通道交叉口;拾取和配送(P / D)位置可以被看作是由一组弧连接的图上的节点。弧描述了车辆从节点移动到节点时所能遵循的路径。有向弧表示车流方向。成本可以分配给每一个弧,表示一个线段的两个端点之间的距离或车辆沿圆弧行驶所需的时间。网络流模型可以转化为0 - 1整数优化模型。引导路径设计问题的主要目标是最小化车辆总行驶距离。信息短缺是引导路径设计中的一个重要问题。例如,仓库内物料的流动可以随时间而变化,而且很难估计。
引导路径系统大致可按表1所示的特性分类。流拓扑描述了引导路径网络的复杂性。在最简单的情况下,引导路径系统只有一个单回路。几个循环组合在一起形成串联配置。传统的拓扑结构是一个复杂的网络,有路径、交叉、快捷方式和连接。网络中的路径段可能只包含一条或多条平行车道。车辆只能沿一个方向(单向)或双向行驶(双向)行驶。选择合适的引导路径系统类型是很重要的。不幸的是,没有指导方针。根据设备的特点和设计者的经验,通常选择引导路径类型。专家系统可用于支持引导路径系统选择过程。在选择合适的引导路径系统之后,设计者可以使用合适的数学模型获得最佳的引导路径系统。在实践中,仓库和配送中心可以定期看到常规的引导路径系统 (De Koster et al., 2004);例如,在交叉码头中心使用单回路系统。串联配置可能更适合于将工作站分组到制造单元中的制造环境。
4.3电池管理:
虽然电池管理对于车辆管理很重要,通常在研究中忽略这个问题。当然,车辆必须在一定的运行期内充电,但大多数研究式假定电池问题对性能影响不大。然而,事实上,即使使用了交换电池,几乎没有电池的车辆也无法获得性能上的潜在影响。电池交换只能在特定地点进行,因此车辆暂时无法使用。这意味着需要额外的车辆或负荷等待时间增加。根据McHaney(1995),电池的限制,只能略有些情况下:与自然发生的断裂系统,位移的变化正好与电池更换或充电,有大量的空闲时间系统,及系统在充电可以调节和被保险人而不影响系统运行发生。现代和完全充电AGV可能运行6小时或更多,而不充电电池。在仓库等设施中,车辆可能会自然断裂(例如在午餐和咖啡时间),电池充电可能不是问题。McHaney(1995)提出三种充电方式:(1)机会充电使用的AGVS循环自然空闲时间补充电池,(2)自动充电AGV运行直到电池耗尽到一定水平,然后调度器分配该AGV充电,(3)相结合的制度,这是一个前两者的组合。艾朋(2001)提出的几个启发式规则的调度车辆,需要充电。可以送车到最近的电池站,最远可达电池站在当前路径等。此外,我们还必须考虑电池容量的充电站(有足够的汽车充电位置),和车辆的下一份工作,所以我们可以添加一些其他的规则,如发汽车电池站,靠近车辆的下一份工作。估计所需电池数量的问题也很重要。所需数量的电池非常强烈地依赖于所选择的电池类型(Ebben,2001)。Ebben(2001)也表明,电池的数量的变化在很大程度上取决于电池的容量和电池的网站数量少。他还提出了一种成本权衡分析帮助设计者选择电池的类型、数量和电池站位置。这里的另一个问题是如何选择电池充电站的位置。必须设置这些站,以减少电池充电对系统运行的影响。蓄电池站可与车辆停放地点重合,以节省空间,并与机会充电相结合。车辆在计划营运时,亦应考虑车辆电池充电计划。这些问题在现阶段的文献中没有得到考虑。
4.4车辆路径与死锁解决:
在经营决策层面,必须解决车辆路由和死锁解决(以及预防)问题。车辆调度和路由式无死锁是非常重要的。死锁可能导致整个系统崩溃或被阻塞。死锁可能发生在某些情况下,例如两辆车到达同一交叉点,或两辆车在双向路径上朝不同方向行驶。有几种方法可以避免死锁。AGVSs,用一个更好的路由算法为例,采用单回路,串联或SFT配置;即将发生碰撞的鉴定,通过向前检测并因此避免通过车辆回溯和/或重路由;实行区域控制和广泛的路径规划。
4.4.1车辆路径
车辆调度和路径问题是密切相关的,应该同时解决。车辆路径问题决定了车辆应采取的路线和车辆应访问的顺序(或作业)。调度问题也决定了车辆应拾取(和交付)负荷的时间。在串联系统中,路由问题是很简单的,T. Le Anh,M.B.M. De Koster /欧洲运筹学杂志171(2006)1–23 17但在常规系统中,它是更复杂。在调度部分4.1中,我们假设车辆可以无死锁地到达目的地。然而,为了避免死锁,还需要考虑车辆路径问题。基姆和坦乔科(1991)提出了一种基于Dijkstra最短路径算法基于节点的调度时间窗的车辆。此方法产生无死锁调度。然而,正如作者所指出的,计划中的一个小变化可能会彻底摧毁它。taghaboni和Tanchoco(1995)引入增量的路径规划和调度算法。 其他的方法介绍了rajotia等人。(1998年)和秋和Hsu(2001)。关于车辆路线问题的更多细节可以在邱等人中找到(2002)。
4.4.2死锁的处理
车辆解决和预防死锁问题是AGVSs的重要问题。依靠引导路径系统和车辆控制机制,这些问题在一个系统中可能比其他系统更为严重。死锁预防和解决任务不是使用串联循环引导路径的系统中的问题。然而,它们在其他系统中,尤其是使用常规引导路径的系统中非常重要。在制造系统中,工作站的输入和输出队列中没有可用的空间。因此,有效地使用队列空间是一个重要的问题。
平衡系统工作负载。当制造系统中的机器或配送中心的P/D位置只有很少的缓冲空间时,系统可能被缓冲区的溢出阻塞。可能的原因包括缓冲容量不足或使用不恰当的调度(调度)系统。为了解决第一个问题,可以引入一个中央缓冲区来解决临时阻塞问题。Kim等人。(1999)表明中央缓冲区对系统性能有重要影响。第二问题可以采用工作量相关的调度规则解决(Egbelu and Tanchoco, 1984; Mahadevan and Narendran,1994; Kim et al., 1999)
- AGV系统的设计与控制框架:
我们的文献回顾草图的层次结构和一个AGV的控制设计(图3)。在这个框架中,高层决策为下级决策制定边界条件,后者是在以后采取的。设计过程需要输入数据,如设备布局和性能要求,以便于开始。第一步(在战略层面)是设计一个引导路径系统。经过这一步,在战术层面上的问题,包括估计所需车辆的数量,调度车辆,决定停车政策,同时设计的电池管理方案被考虑。战术层面上的决定相互影响,应该同时考虑。这些决定也会影响引导路径设计决策(由破折号箭头如图3所示);特别是在自由放养或智能AGV的应用。在业务层面,我们需要控制无交通问题的引导车辆。
图3
- 结论以及进一步研究:
在本文中,我们讨论的最关键问题的设计和控制相关的系统。这些问题如图3所示。引导路径设计在AGV的设计与控制的战略作用。引导路径系统可分为三类:常规、单回路和串联系统。它们各有优缺点(表3),适用于具体应用。除了引导路径设计问题,确定在AGV车辆的要求也很重要。主要的车辆估计模型包括旅行时间、排队、回归和网络模型。在一些良好的调度规则下获得良好的空车估计是本文的关键问题。有效地管理AGV系统是另一项重要任务。这项工作包括几个子任务:车辆调度,闲置车辆定位,电池充电,车辆路由和死锁解决。在实际情况中,由于AGVSs的随机性在线调度(调度)比离线调度更受欢迎。一般来说,动态(在线)调度方法优于调度规则;然而,它们要复杂得多。调度系统还可以决定车辆在没有死锁的情况下到达目的地的路线。在车辆阻塞和干扰问题出现的情况下,我们需要一个好的死锁解决系统。为了更好地服务未来的工作,控制器应该引导闲置车辆到战略停车地点。一般来说,车辆通常是以新请求的平均或最大响应时间最小化的方式存在的。大多数作者忽略了AGV电池充电问题。然而,在长途旅行距离的情况下,电池充电成为一个重要的问题,也需要加以考虑。
在回顾和一个AGV的控制设计的重点出版物,我们发现仍然存在一定的差距,需要更深入的研究。这些不同为今后的研究指明了方向。我们提到其中最有前途的:
bull; 重要的是要知道何时何地我们应该选择一个特定的引导路径系统。此外,双向引导路径系统虽然能够提高系统性能,但尚未引起人们足够的重视。
bull; 为了估计所需车辆数,在良好的调度规则下,更好地估计车辆的空行程和车辆干扰所造成的损失,这仍然是一个重要的问题。
bull; 调度是目前最流行的控制车辆在实践中的方法。一种能有效利用负载到达前信息的动态调度方法可以获得更好的性能。然而,动态式调度方法仍然没有得到太多的关注。在许多AGVS中,它也将车辆停放在车辆调度问题的重要问题。
bull; 多负载车辆是昂贵的,但可能会导致大量的吞吐量增加,这取决于调度系统的质量。目前仍缺乏研究,开发高效的调度和调度算法的多载车辆AGVSs。这为以后的研究留下了充足的空间。
bull; Smart AGVs变得更受欢迎。他们改变了对AGV的一些设计和控制问题的重要性。例如,获得最佳的引导路径系统是不那么关键的,但系统适应未来需求的灵活性可能更为重要。然而,很少有研究和使用智能车式控制设计有关,其中明确提出了一个重要的研究方向。
bull; 在实践中智能制造系统(IMS)采用智能机器和智能AGV成为越来越重要。在这样的系统中,机器和AGV可以作为智能代理。这些代理有着很先进
全文共5642字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11300],资料为PDF文档或Word文档,PDF文档可免费转换为Word

