
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
ScienceDirect
Journal of Bionic Engineering 3(2006)187-194
鱼 - 机器人运动的仿生神经网络
张代兵,胡德文,沉林成,谢海滨
国防科学技术大学机电工程与自动化学院,长沙410073
摘要
提出了一种用于鱼类机器人运动的仿生神经网络。 受鱼神经网络启发的仿生神经网络由一个高级控制器和一个中央图形发生器链(CPG)组成。 每个心电图包含一个非线性神经张振荡器,其性质类似于正弦余弦模型。 仿真结果表明,仿生神经网络在控制鱼类机器人执行各种运动如启动,停止,前进游泳,后退游泳,右转和左转等方面表现出良好的性能。
关键词:神经网络,中心模式发生器,非线性振荡器,游泳运动,鱼类机器人
吉林大学版权所有copy;2006。 由科学出版社和Elsevier有限公司出版。 版权所有。
介绍
目前大多数鱼类机器人都受到水生动物特别是鱼类的启发而设计
各种目的,如娱乐,探索,交通和医疗。 控制
由微处理器,功能单元和电路组成的系统与动物的神经网络有很大的不同,并与形状,结构,运动方式等其他相似之处形成鲜明对照。 运动步态是从鱼类运动的实验观察中提取的。 高级控制器扮演步态生成的独特角色,并负责所有关节的步态分布[Z-4J_与运动的真实动物神经网络的机制完全不同。 动物的情绪不仅受到先进的神经中枢系统的调节,而且受到位于脊髓中的称为中央模式发生器(CPG)的局部神经网络的控制。 对七鳃鳗的系列研究表明,CPG不仅可以支持节奏性运动,还可以协调节段性和节段性运动与传感器反馈
用于鱼类机器人运动的神经网络。 仿生神经网络由一个高层控制器和一个由耦合非线性人工神经元振荡器组成的CPG链组成。 它有许多类似于鱼的神经网络的类似,比如“虚拟的情感”,游泳的启动或停止,转向和节间协调。 仿真结果证明了鱼类机器人运动控制的有效性。
我们在接下来的四个章节中介绍了我们的研究。 首先,在第2节中分析了鱼类运动神经网络的原理。然后,在第3节中提出了用于鱼类机器人运动的仿生神经网络。第4节中,仿生神经网络的实验结果分别给出运动。 在第5节中,简要总结了结论。
鱼类运动的神经网络
鱼类的运动可以分为两类:周期性(稳定或持续)游泳和短暂(不稳定)运动周期性
游泳的特点是重复亲热力运动,并被鱼用来覆盖长时间适应环境变化距离在一个或多或少不变的速度。 它一直是生物学家和科学家关注的中心,
仿生工程杂志(2006)第3卷第4期
因为它是鱼类和鱼类机器人使用的主导运动方法。 大多数鱼类通过将身体弯曲成延伸到其尾鳍的向后移动的推进波来产生推力。 一种分类为身体和或尾鳍的游泳其他鱼类已经开发了包括使用它们的中间和胸鳍的替代游泳机构,称为中间和/或成对鳍(MPF)运动与BCF推进和MPF pro脉冲有关的游泳模式由Lindsey详细描述,
bull;
我们只专注于诱发主推力的推进器的神经网络,因此,胸部鳍的微妙控制。 骨盆鳍,肛门鳍与鱼的可操作性有关的超出本文的范围。
大多数鱼属于脊椎动物,因为它们的特征不同
脊髓中枢神经系统的神经网络组织,BCF运动和MPF运动都属于生物学家的节律运动,产生节律性运动通过中心模式生成网络,其输出由感官和神经调节输入形成以允许使动物适应其变化,在实验中和证据证明七鳃鳗的神经回路已经存在,控制运动的CPG由Ly-ODS提出。
'·
由于它们固有的非线性特性,微观尺度,复杂的耦合和大量的神经元等,很难记录设备中神经元之间的详细相互作用。 一个完美和完整的数学模型描述本地神经网络的动态运动几乎是不可能的。
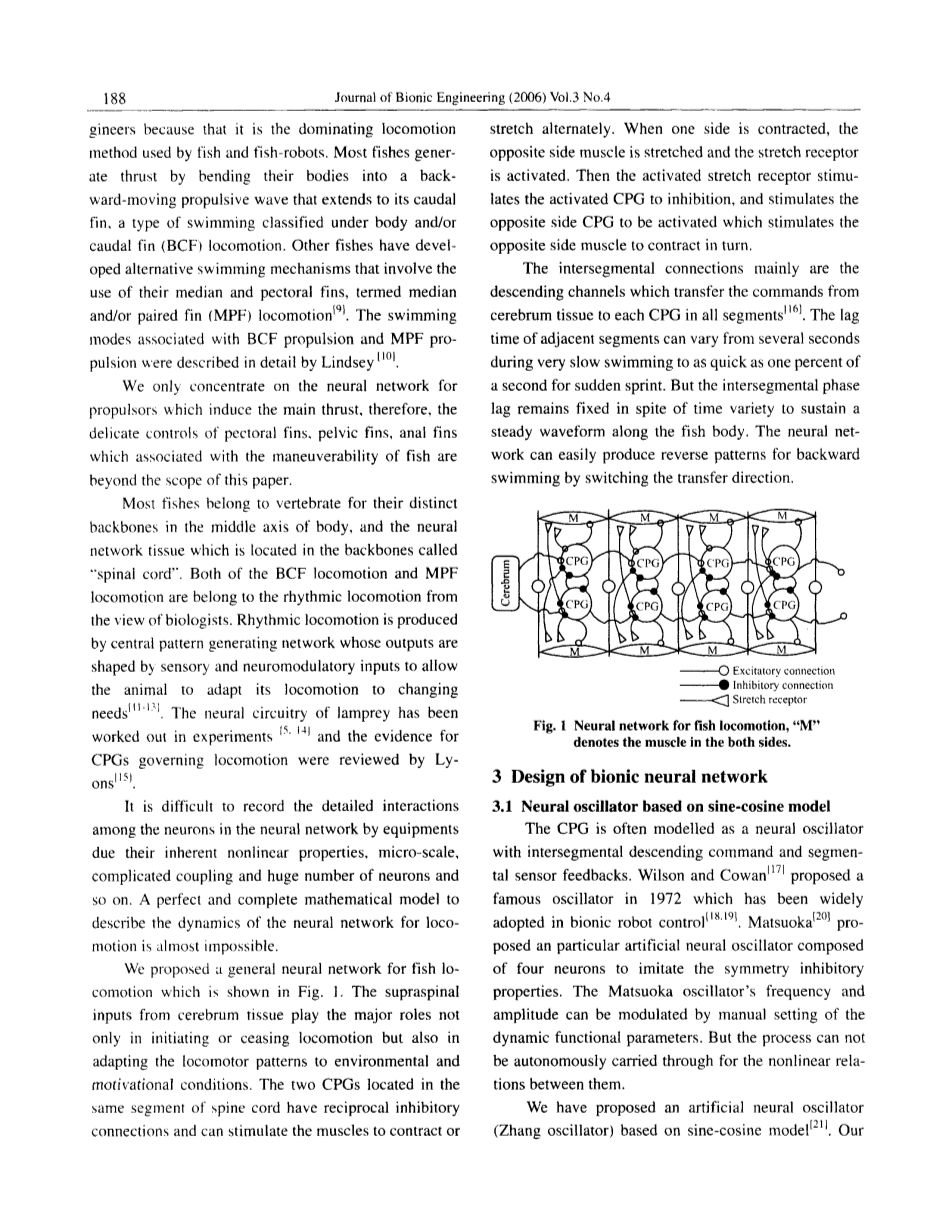
我们提出了一个通用的鱼类情绪的神经网络,如图1所示。 大脑组织的基础输入不仅在启动或停止运动方面发挥主要作用,而且还在使运动模式适应环境和动机条件方面起主要作用。 位于松绳同一段的两个CPG具有相互的抑制性连接并可刺激肌肉收缩或收缩
交替伸展。 当一侧收缩时,对侧肌肉被拉伸并且拉伸受体被激活。 然后激活的牵张受体刺激活化的CPG受到抑制,并刺激对侧CPG被激活,从而刺激对侧肌肉轮流收缩。
节间连接主要是将大脑组织的命令传递到所有节段中的每个CPG的下降通道。相邻节段的延迟时间可以在非常缓慢游泳期间从几秒变化到快一个百分点第二次突然冲刺。 但是尽管时间多样性,沿着鱼体维持稳定的波形,但节间相位滞后仍然是固定的。 通过切换传输方向,神经网络可以很容易地产生逆向游泳的逆向模式。
bull;
- 兴奋连接禁止连接
--- c:J伸展受体
- ---lt;bull;bull;
图1鱼类运动的神经网络,“M”表示两侧的肌肉。
仿生神经网络的设计
3.1基于正余弦模型的神经元振荡器
CPG通常被模拟为具有节间降序命令和节段的神经振荡器数字传感器反馈。 Wilson和Cowan在1972年提出了一种着名的振荡器,这种振荡器已被广泛使用提出了由四个神经元组成的模拟对称性抑制特性的特定人工神经振荡器。 松冈振荡器的频率和幅度可通过手动设置动态功能参数来调节。 但是它们之间的非线性关系不能自主地进行。
我们提出了一种基于正弦余弦模型的人工神经振荡器(Zhang振荡器)。
张代兵等:鱼 - 机器人运动的仿生神经网络
如图2所示的振荡器与Wilson-Cowan振荡器具有很大的可比性。
r表示极限周期的近似半径。 张式振荡器的整个动力学由方程 (1)和(5)可以用下面的方程来描述:
(6)
4
r u
r
图2张氏震荡器
振荡器的动态可以用下面的微分方程来描述:
振子的极限环形成过程如图3所示。原点0(0,0)是唯一的平衡点,它远离极限环的吸引力。 但它仍然是一个不稳定的点,只有一点点干扰信号才能被推开,并迅速跌落到极限周期。
张氏振荡器在其中分解参数的属性非线性函数,与Wilson-Cowan振子的组成相反。 它使得振荡的每个参数的调制都可以实现。
(1)
u和v分别表示抑制性和兴奋性中子活动,w是主要决定振荡角频率的参数,f(x)是非线性函数。 如果我们将非线性函数始终设置为零,那么系统就会变成
一般正弦余弦振荡写成
3.0
A
#39;
2.5
2.0
1.5
1.0
如果初始条件为
{
从而得到系统的全局解决方案
(3)
'#39; 0.5
0.0
-0.5
-1.0
-1.5
-2.0
11
最初的正弦余弦振荡由于在相平面中缺少极限循环而导致干扰输入不稳定。
我们在Zhang振荡器中选择的非线性函数由负线性部分和非线性反切部分组成。 它在下面描述
下降方程:
(
图3 uv相平面中振子的极限环,k = 5,r = 1,OJ = 21t。
3.2分段CPG的设计
处于负面活动状态的生物神经元不能刺激肌肉收缩或伸展。 虽然它有能力产生周期性变化的活动信号,但负面活动中的单个CPG意味着每条脊髓段中的生物神经网络由两个CPG组成,以控制右侧和左侧肌肉。但是没有这样的
仿生工程杂志(2006)第3卷第4期
执行器像鱼机器人中的肌肉一样。 鱼机器人中的常见致动器是不同的电机或电机变速箱组成仪器。 我们假设一个电机安装在体轴接头中,并且可以通过分布在每个节段中的本地微处理器单元进行控制。 因此,设计一个CPG来控制电机的运动是有效和经济的。
我们设计了一个基于Zhang振荡器的分段CPG,如图4所示。分段CPG的动力学由以下等式描述:
从抑制性神经元到马达的输出。
用于鱼类机器人运动的仿生神经网络
CPG的神经网络通常被建模为一个耦合的非线性神经切机[\)[我们还提出了一个仿生神经网络,由一个基于Zhang振荡器的多个CPG链组成,如图5所示。高电平控制器包括车身摆动角频率,转弯时的倾角和偏角。 人工CPG控制器的数量与电机设备驱动的接头对应。
.
游泳中的节间连接强度和时间延迟可以通过两个耦合参数来模拟,其定义如下:
/
/
/
/
..... .....
..... .....
(8)
#39;-
图4基于Zhang振荡器的分段CPG。
其中s表示节间连接系数1T是交叉心理联系的平均时间延迟。
我们假设体内呈现的波形数目是n,1,并且尽管波动频率和游泳速度改变,但仍大致保持不变。计算时间延迟的公式
/
其中p11,p ..表示由下降命令和传感器反馈组成的外部输入,y表示
其中n是关节数量,f是波动频率(Hz)。
图5鱼类机器人运动的仿生神经网络。 关键参数由高级控制器直接控制。 正向连接的存在是将推进波从尾部传递到头部,使鱼类机器人一直向前游动,就像我们在鱼类中观察到的那样。
张代兵等:鱼 - 机器人运动的仿生神经网络
仿生神经网络可分为头段,尾段和中段三部分。 头段的动力学由以下等式描述:
我们假设鱼饵机器人的每个关节都由一个致动器驱动,并带有一个转动自由度。 关节的动力学被给出为
1
中间部分的动态具有统一的表达形式,被描述为
关节或与周围环境冲击。 所以联合动力学的参数并没有保持,而是一直在变化。 它们几乎不可能被精确地测量或者用精确的数学动态函数来建模。
鱼类机器人建模
近年来有很多鱼类机器人被开发用于不同目的\,我们将它们分类为以下三种模式。
bull;
-
-
- Anguilliform鱼机器人。 它们由从头到尾的许多关节组成。 当他们在水中游泳时,行波会从头到尾转移。 图6(a)显示了anguilliform鱼类机器人的仿真模型。
- BCF鱼机器人。 它们由身体到尾部的几个关节组成。 当他们在水中游泳时,头部几乎保持静止,但后者的身体和尾鳍呈现出增大的行波。 BCF鱼类机器人的仿真模型如图6(b)所示。
- 鱼鳍鱼 - 机器人。 它们由几个波形鳍和刚性柱体组成。 每个波状散热片由一个薄膜和许多平行安装在刚体上并由一个执行器驱动的散热片组成。 图6(c)显示了无规律鳍鱼机器人的模型。
-
羚羊和BCF鱼类机器人具有转向能力,但是仅由一个波状翅片驱动的波动式鳍状鱼类机器人完全不能转动。 主要的
-
-
-
- Anguilliform鱼机器人
-
-
-
-
-
- BCF鱼机器人
-
-
(cJ鱼翅机器人
图6不同的鱼类机器人。
- 仿真结果
模拟模型
在一系列强连通Wilson-Cowan神经元振荡器的混沌同步和控制的复杂动力学中进行了研究
bull;
它们之间的差异是关节的数量,相互关系
由仿生神经系统组成的系统
心理耦合强度和摆动频率。 网络和刚性动力学模块更复杂
仿生工程杂志(2006)第3期NoA
动态特性,难以在线性或非线性控制理论中分析。 我们完全基于Matlab Simulink环境构建了实例,以确保其准确性。 视觉能力和方便性。
我们将重点放在鱼类机器人游泳运动的控制方法上,例如启动。 停止,前进或后退游泳和转身。 仿生网络中的所有参数都可以单独和手动设置。 我们使用unifo1m模型通过调整几个参数来模拟鱼类机器人的不同模式,就像神经网络的类似原理在不同鱼类模式下工作一样。 每个CPG模块的动态方程由方程式给出。 方程式中每个CPG模块的输出。连接到一个分段控制器,该控制器通过方程式控制相应的接头。
采用简单的比例控制器来仿真鱼类机器人中广泛使用的伺服电机的特性。 驱动力给出为
输出在tE [0,2]。 网络从CPG1到CPG6被激活,并以恒定的脉冲延迟(或时间延迟)进入稳定的振荡状态。 图7(b)显示了同一过程中关节角度的变化。 鱼的机器人身体的整个启动过程如图所示
图8在10的时间范围内。 3.5。 振荡是
在几个时期内从头到尾转移。
lt;
全文共8228字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15231],资料为PDF文档或Word文档,PDF文档可免费转换为Word

