英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
用于两栖全地形车辆(A-ATV)的新型可变形车轮的设计和开发
摘 要:传统的地面轮式车辆通常通行能力较差,效率较低,能量消耗大且在松软地形上行驶时可能会失效。为了解决这个问题,本文提出了一种用于两栖全地形车辆的可变形车轮的新设计。车轮有两种极端的工作状态:展开的行走轮和折叠的刚性轮。此外,可变形轮的运动特性采用运动学方法进行研究。当车轮以行走状态展开时,分析具有不同滑动率的车轮的位移,速度和加速度。当可变形轮在松软地形上行驶时,应用典型的岩土力学方法研究应力状
态,得到了车轮牵引力,车轮参数与应力作用下的土体变形之间的关系。结果表明,通过使用所提出的可变形车轮,可以改善车轮的牵引力和可操作性。最后,建立了基于车辆地面力学的有限元模型,模拟了可变形轮在不同展开角度下驱动时可变形轮和弹塑性地面的相互作用结果。仿真结果与理论分析一致,验证了本文开发的可变形车轮的适用性和有效性。
关键词:可变形轮;松软地形;车轮地形交互;牵引性能
1简介
为了改善轮式车辆在松软地形上的可通过性,目前研究人员仅限于提高车辆的地面附着能力,如全轮驱动,有限滑移差,加速滑动调节,高速车轮和中央车轮加速系统。然而,这些方法有一定的局限性,需要进一步的研究。
通过研究车辆的支撑和行驶功能,可以改善传统的地面轮式车辆在松软地形上的可通过性。因此,就车辆设计而言,用“浮动”或“半浮动”原则来取代先前的“淹没”原理,可作为一种解决在软质地面上车辆的通行能力的方法(Wang and Zhu,1980)。
在美国,开发了行星轮式行走装置并将其用于在松软的地面上行驶(Forsyth和Forsyth,1970),例如沼泽地。车身的侧面部分接触软质表面,以支撑车辆的重量并减少由于车轮的低承载能力所造成的沉降。当行星轮被离合器固定时,行星轮不随着车轮的滚动而旋转,因此车辆可以被分步驱动以提供足够的推进力。
为了提高月球车的通行能力,哈尔滨工业大学设计了一种新型月球车,它采用了带有扭杆弹簧和磁力弹簧减振器以及独立行星驱动轮的平行悬挂系统(Deng and Gao ,2003)。为了验证车辆的越障能力(邓和高,2004,2005),进行了坡道移动测试和垂直障碍物通过测试。月球车Luna-khod(Heiken,1991)的弹性筛网轮在硬支架区域被驱动,并且轮外缘和路面之间实际上存在点接触。当在松软地形上行驶时,中间轮圈下面的土壤由于重力而变形,并且轮辋的整个表面与道路的表面接触以增加接触面积并提高可通过性。北京航空航天大学设计了一种新型带爪的越障碍爬轮,并进行了车轮的运动学和动力学仿真。车轮可以以比车轮半径大1.4倍的高度缩放一个台阶,并且车轮在不平坦地形环境中具有较强的越障能力(Yue and Wang,2007)。
自20世纪70年代以来,船用耕种机已普遍应用于深水稻田。所有提到的非传统步行机制都只能适应特定的条件。气垫车是一种两栖全地形车,但由于其高的能耗,低效率和高噪音,其应用受到限制。这里提出的可变形轮可以在展开和折叠之间转换它的结构形状。在展开状态下,在松软地面上驱动的可变形轮表现出低滚动阻力,高驱动力和良好的可移动性。在折叠状态下,可变形车轮可以像普通车轮一样在路面上行驶。带可变换车轮和浮动车身的A-ATV可用于解决在松软地形上行驶的问题。新的可变形车轮相对其他车轮来说有许多优点以及重要的理论和工程价值。
2.设计理念
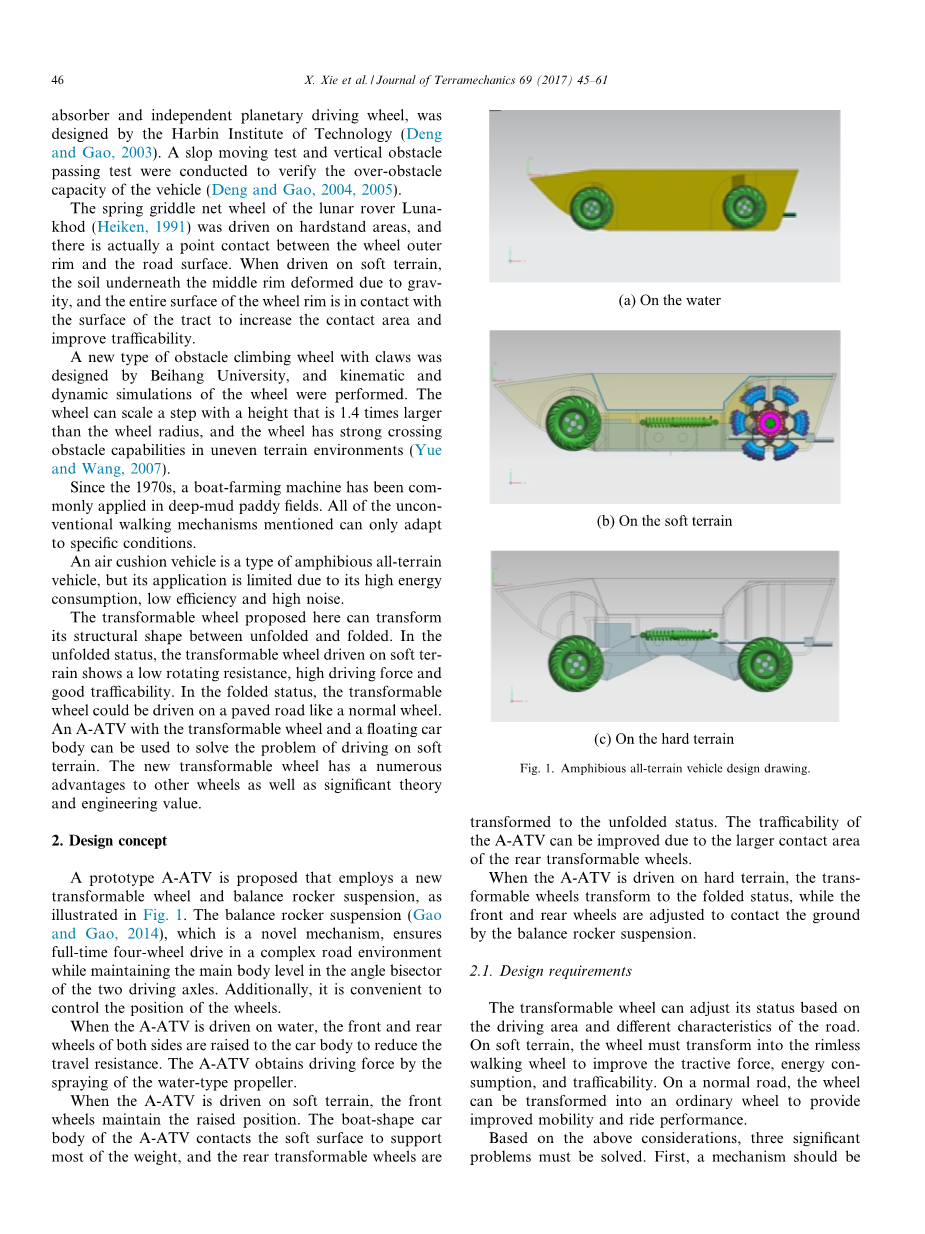
如图1所示,提出了一种采用新型可变形车轮和平衡摇臂悬架的A-ATV原型。平衡摇臂悬架(Gao和Gao,2014)是一种新颖的机构,可确保四个轮子在复杂的道路环境中行驶,同时保持两个驱动桥的角平分线中的主体水平。此外,控制车轮的位置很方便。
当A-ATV在水上行驶时,两侧的前轮和后轮升高至车体以降低行驶阻力。 A-ATV通过喷水式螺旋桨获得驱动力。
当A-ATV在松软地形上行驶时,前轮保持升起状态,A-ATV的船形车身与软质表面接触以支撑大部分重量,而后部可变形车轮则转变为展开状态。由于后变形轮的接触面积较大,可以提高A-ATV的通过性。
当A-ATV在硬质地面上行驶时,可变形车轮变为折叠状态,而前轮和后轮通过摇臂悬架调整使接触地面。
2.1 设计要求
可变形车轮可根据驾驶区域和道路的不同调整其状态。在松软的地形上,车轮必须变成展开式行走轮,以提高牵引力,改善能量消耗和可通过性。在正常的道路上,车轮可以变成普通车轮,以提高动力性和平顺性。
基于上述考虑,必须解决三个重要问题。首先,应该设计一种机制来使车轮在展开状态和折叠状态之间转换。其次,必须解决传动机构驱动可变机构的能力。第三,可以整合两种机制来减少所需的空间。
2.2 结构和工作原理
在本文中,可变形机构主要由可变形套筒,链轮组,蜗杆副和其他部件组成。可变形的套筒安装在轮毂板和驱动轴之间以围绕半轴转动。套筒的一端连接到传动链轮,另一端安装在转换制动器上。
图2是链轮组的配置图。六个从动链轮均匀分布,从动链轮的每个链轮轴均为蜗杆。当套筒与驱动轴一起转动时,安装在蜗杆副上的轮脚骨架可以转动相应的角度。使用链轮组和蜗杆副的新机制来实现转换过程。该机制有效地实现了变换操作并通过蠕虫对解决了自锁问题。
可变形车轮设计原理图如图3所示,其工作原理如下:在驱动机构的作用下,套筒在驱动轴上转动,驱动链轮安装在驱动轴上并转动轮毂板,从动链轮的端部为蜗杆,驱动链轮的转动带动蜗杆副; 此外,轮脚转动一个特定的角度,这是转换过程。另外,蜗杆副需要自锁能力来维持可变形车轮中的展开状态。同时,轮脚需要合理的几何形状进行变形过程而不受干扰。
可变形轮的展开/折叠状态图如图4所示。以下部分给出了车轮的运动学和动力学仿真,以验证本文提出的可变形车轮的适用性和有效性。
3.运动学分析
3.1 驱动轮的运动学分析
当A-ATV在松软地形上行驶时,认为车体保持水平运动,其垂直位置不受驱动轮滚动的影响。因此,驱动轮轴保持水平运动。
如图5所示,当驱动轮以一定的角速度滚动时,轴点O以速度v沿着水平方向移动。它相当于一个半径为r的刚性车轮。这是沿着虚平面A-A的纯滚动。通过轴点O形成一条垂直线,与平面A-A的交点即为滚动轴。车轮滚动半径称为r。
当驱动轮在地面的驱动扭矩下作纯滚动时,尽管驱动轮会发生一些滑动,车轮地形相互作用可以提供驱动力。当轮子作为从动轮时,需要外力使车轮滚动。理想情况下,驱动轮将滚动而不滑动。
如图5所示,驱动轮作纯滚动时,A-ATV的速度为理论速度Vl,理论滚动半径为rl。wq是滚动角速度。理论速度可以根据公式(1)来计算
在实际应用A-ATV时,即使在空载状态下,驱动轮总会有一定的滑移率。 因此,驱动轮的实际速度V小于理论速度Vl。 实际速度可以根据公式(2)来计算
由滑移引起的速度损失可以通过实际的滑动d0来计算:
在实际应用中,由于理论滚动半径在不同的工作条件下变化,因此使用实际的滑移率进行理论分析和计算是不方便的。半径取决于土壤性质,驱动轮的结构参数和其他因素。因此,本文将滚动半径替换为外侧半径来计算滑移,这被称为相对滑移率d,由以下公式确定:
滚动半径r随着A-ATV牵引负载而变化,这可以在测试期间获得。如果A-ATV在一定负载下通过一定距离s,并且车轮转速为n,则可根据式(5)计算出滚动半径
3.2可变形车轮脚和脚孔运动轨迹的运动学分析
当驱动轮在土壤中滚动时,轮脚不断进出土壤,这在土壤中形成了轮脚孔,其成形过程反映了轮脚和土壤之间的相互作用。因此,重要的是分析轮脚孔的形状和成型过程以确定轮脚的应力,轮脚孔的理论形状和尺寸由轮脚轨迹确定,并且它们随着驱动轮的滑动率和轮脚的结构参数而变化。以下部分包含脚部轨迹,轮脚孔的形状以及一些因素的影响分析。
当可变形轮在展开状态被驱动时,由于轮脚冠表面是风扇柱体,所以最高点位于轮脚骨架滚动轴的轴线上。与路面的接触点始终在沿着垂直平面的车轮轴向骨架轴线上,因此展开状态下的可变形车轮的运动学分析相当于发现包含接触点的部分的滚动条件。
图6中示出了包含轮脚骨架滚动轴的部分的滚动条件图,其中A是具有坐标(xA,yA)的轮中心,h是轮中心的高度,B是带有坐标(xB,yB)的轮辋冠边的一个点,是AB和直角坐标的x轴之间的角度,w是滚动角速度,r是等效半径。
假设转速保持不变,轮心初始位移为xOA = 0,滑移率为,又有。点B的坐标可以用下面的等式表示。
从方程(7)中可知,点B的轨迹与可变形车轮半径和可变形车轮滑移率相关联。
根据其运动特点,B点的可变轮纯滚动轨迹在一个周期内是对称的,所以B点的坐标应该与轨迹一致,如图7所示。
如图8所示,展开车轮的仿真模型由软件建立,车轮胎冠表面边缘点M,N,P和Q的轨迹通过模拟可变形轮的纯滚动给出。
图9中示出了具有90°的车轮转向角的4个点的轨迹,该x轴是水平位移,y轴是点的垂直位移。曲线1,2,3和4分别代表点M,N,P和Q的轨迹,E和F被认为是曲线1和曲线3的底部,所以EF是可变形车轮车辙的投影长度。
如图10所示,建立了路面转角(45°,60°,75°和90°)作纯滚动的运动模拟,给出了轮脚胎冠表面边缘点的轨迹,结果如图11所示,垂直(y轴)轴代表点的垂直位移,而水平(x轴)轴表示水平位移。曲线1,2,3和4分别代表在转角45°,60°,75°和90°处的轨迹。纵向长度随着转向角度的增加,轮脚的车辙减小。在实际的车轮地面相互作用下,这种情况会减轻相邻轮脚的影响。
对于90°的转向角,模拟松软地形上具有变化滑移率的可变换车轮转动,并且所得到的轨迹如图12。其他转角的轨迹具有相似的趋势,如下面的仿真结果所示。垂直(y轴)轴表示点的垂直位移,水平(x轴)轴表示垂直位移,图12a-c分别表示滑动速率分别为0.3,0.5和0.7的点M,N,P和Q的轨迹,并且可变形轮的滑动假定是均匀的。
当可变形轮以一定的速度进行纯滚动时,图13示出了轮脚冠表面边缘点的垂直位移,速度和加速度之间的关系。垂直(y轴)轴表示垂直位移,速度和点的加速度。水平(x轴)轴表示水平位移。曲线1,2和3分别表示垂直位移,速度和加速度。
当可变形轮在松软路面上以0.5的滑动率进行滚动时,图14中示出了轮脚冠部表面边缘点的垂直位移,速度和加速度之间的关系。曲线1,2和3分别表示垂直位移,速度和加速度。
在车轮脚孔成型过程中,车轮脚上的土壤会产生功率损失,滚动阻力是由于土壤反作用力产生的,它是在轮脚向下向前冲击土壤或挖掘土壤时产生的,应减少或避免。轮脚向后冲击土壤也会产生动力损失,但可以在土壤中获得车轮推进力,是必要的。从分析车轮脚孔成形过程可以发现:
(1)驱动表面对土壤的向下作用由轮脚进入土壤表面时的运动特性决定,并且不可避免。这是此类车轮滚动阻力较大的重要原因。
(2)当车轮脚离开土壤表面时,驱动表面与未成形土壤的相互作用产生挖掘土壤的效果。这个问题随着滑差率的增加而恶化,必须采取措施来避免这个问题。
(3)非驱动表面和土壤之间的相互作用产生阻力,这会使车轮前的土壤变形,必须通过减小非驱动表面的角度来避免。这种现象会随着滑移率的增加而降低,这是降低转动阻力并增加滑移率的原因之一。
(4)轮脚孔成形过程的主要因素是滑移率,如图12所示,随着滑移率增加,轮脚孔的上部宽度趋于减小并且底部宽度趋于增加,底部宽度由行驶表面和未成形土壤的相互作用决定,当滑差率增加时会产生水平力,从而降低滚动阻力。
(5)比较分析图13和14表明当可变形轮滑动时,轮脚的位移、速度和加速度在空间中重复。 因此,车轮脚冠表面的垂直位移,速度和加速度出现在边缘点处,并且运动条件比纯旋转更复杂。
4.动力学分析
当车轮在松软地形上滚动时,产生下沉和滑动的力的条件与土壤的机械性能密切相关。可变形轮具有展开和折叠状态,地面反作用力随着车轮脚的不同转向角度而变化。在下面的章节中,描述了在松软地形上滚动的可变形轮的力学性质和受力情况。
4.1 折叠式变形轮的驱动力分析
土壤的机械性能主要表现为压力下降和剪切特性。Bekker(1960)和Terzaghi(1996)等人最初进行的岩土力学工作得出公式(8)。
其中是压力,b是车轮宽度,z是土壤下沉量,n,kc和是土壤参数,三个土壤参数是经验性的,没有固有的物理意义,如果至少测试了两种不同的钢板尺寸,则可以根据实验压力下沉数据估计参数。根据实验数据确定土壤参数的过程最初由Wong使用加权最小二乘法(Wong,1980)进行估算,这是本文使用的主要估算技术。
Janosi和Hanamoto(1961)提出的剪切位移表达式如方程式(9):
其中代表剪切应力,j是剪切引起的位移,kr是剪切模量,可通过将Janosi和Hanamoto方程拟合到每个数据集来确定,c是地形内聚力,是内摩擦角,这可以使用莫尔 - 库仑破坏准则得到。
从剪切理论看,折叠轮沿着切线方向有两个主要的土体反作用力:(1)由车轮底部与下沉土壤之间的剪切应力和(2)由车轮侧面和下沉土壤间的剪切应力。当变形轮固定时,两个反作用力的合力为切向推力。
A1是底面剪切面积,A2是侧面剪切面积,由于侧面剪切面积过小,在计算过程中被忽略。
基于Wong和Reece(1967)的工作结论,刚性车轮受力如图15所示。本文用它来模拟车轮和土壤之间的相互作用。剪切变形j由滑移速度vj决定:
在前接触
全文共13217字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13393],资料为PDF文档或Word文档,PDF文档可免费转换为Word

