英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
无人驾驶汽车的GPS追踪系统
Yassine Zein,Mohamad Darwiche,Ossama Mokhiamar
摘 要
本文提出了一种用于自动驾驶汽车的机电一体化系统的设计方案。所提出的设计能够识别基于全球定位系统(GPS)的路线,而不是使用预先保存的不经常更新且不包括所有国家道路的地图。此外,它可以自动避开障碍物并预测碰撞。使用配备有机电一体化系统的小型汽车进行实验测试。结果表明,所提出的系统运行时存在轻微的误差和滑动。提出的自动驾驶汽车方案可以服务于普通人,残疾人和老年人。它可以在道路上使用,甚至可以在校园,机场和工厂等设施内使用,以便运送乘客或货物,从而减少人力和成本。
关键词:无人驾驶;GPS;碰撞避免;追踪系统;
1绪论
在过去的五十年中,工程师继续寻求解决方案,以进一步减少驾驶车辆的人力输入。 Jansson [1]表示,93%的车祸是由人为错误引起的,黎巴嫩红十字会进行的一项研究[2]显示,2014年发生的车祸导致14,516人伤亡。Zlocki[3]等人提出,这些令人震惊的统计数据是由于缓慢发展的现有基础设施的交通密度不断增加造成的。这导致了更复杂和更困难的驾驶情况,也因此增加了人为错误的可能性并增加了事故率。所以需要开发无人驾驶车辆以消除这种错误,最重要的是为了挽救人的生命。另一个黎巴嫩社会事务部[4]进行的统计研究显示,10%的黎巴嫩人口患有残疾。所以面对驾驶存在困难的人,如残疾人和老年人就能使用自动驾驶汽车体验汽车出行的自由。在豪华方面,汽车可以成为迷你休闲室,乘客无需一直面向前方,可以睡觉,享受娱乐功能,甚至在旅途中工作而不用担心开车。该技术伴随着缺点,因为无人驾驶汽车在首次引入时可能非常昂贵。 卡车司机和出租车司机也将失去工作。 另一方面,碰撞修理厂和汽车保险公司可能会受到影响,因为该技术使这些职业的某些方面过时。在调查了这个的优点和缺点之后技术,研究人员意识到它的好处可能超过其缺点,因为可能出现的经济问题就像新技术带来的任何经济问题。 这个问题早已存在,人们找到了应对新技术的经验。那么为什么我们还没有看到道路上的自动驾驶汽车呢?这些车辆将在真实世界中面临众多场景和他们必须面对的条件是主要的阻止制造商投放市场的原因。
开发了多种车辆自动化系统解决这些众多场景。其中一个系统是设置车辆的位置跟踪系统。由Quddus和Noland [5]开发的系统使用数字路线图,该路线图是使用光图像检测和测距(LIDAR)传感器检测道路边界和路缘的道路的机器视觉,以使车辆保持在戴维斯[6]使用线控控制的道路限制内。在Kojima[7]等人的工作中。跟踪系统使用GPS位置数据粗略估计车辆的位置,激光扫描仪通过坐标估计车辆的位置大致监测车辆周围环境,并通过周围物体的相对位置变化加强它。在此外,标记跟踪系统定位车辆根据朱和陈[8]坚持特殊的标记或线条,其他自动化系统包括避免碰撞系统。当遇到可能的碰撞时,驾驶员可以有两种选择,制动或转向。 Labayrade等人[9,10]应用纵向碰撞避免系统来控制车辆的制动,以在到达障碍物之前停止车辆或保持与其他车辆的安全距离。基于类似于Glaser等人[11]的工作的碰撞事件的情况,横向碰撞避免系统通过转向使车辆远离事故。或作为Scacchiolia等人[12]设计的系统。故意造成不稳定,当转向和减速都不足以避免碰撞时,通过控制车辆的制动器使其远离潜在的危险。另外的现有系统是Paromtchik等人[13]讨论的自停车系统。和Enache等人[14]提出的车道偏离系统。无人驾驶汽车经常为用户提供数字预先保存的道路地图,他可以通过触摸屏选择他喜欢的路线,如Kaller所述[15]。该方法具有缺点,因为制造商不经常更新数字地图并且不包括所有道路。本文中设置路径的方法解决了这个问题。实际上,当GPS跟踪系统识别出道路时,用户必须在他想要的路线上手动驾驶他的汽车。这给了选择任何路径的自由,不受具体限制预先保存的路线,可以立即更新道路当出现变化 时。本文仅关注此方法。然而,为了获得两全其美,典型的和提出的方法可以在司机设置的地方一起使用使用数字地图的路线,然后根据需要更新这些地图。本文介绍了一种自动化的机电一体化系统车辆。所提出的系统能够基于GPS跟踪系统识别路线。更实际的应用它还包括以下特征:碰撞避免,碰撞预测。所提出的设计承诺,通过使用自主车辆的建造模型,用低预算的廉价的微控制器和传感器。它可以用来运输校园,机场甚至公路内的乘客。而且,它可以用来携带货物并运输它们在工厂中,从而减少人力和成本。
2 提出设计
2.1机电一体化系统
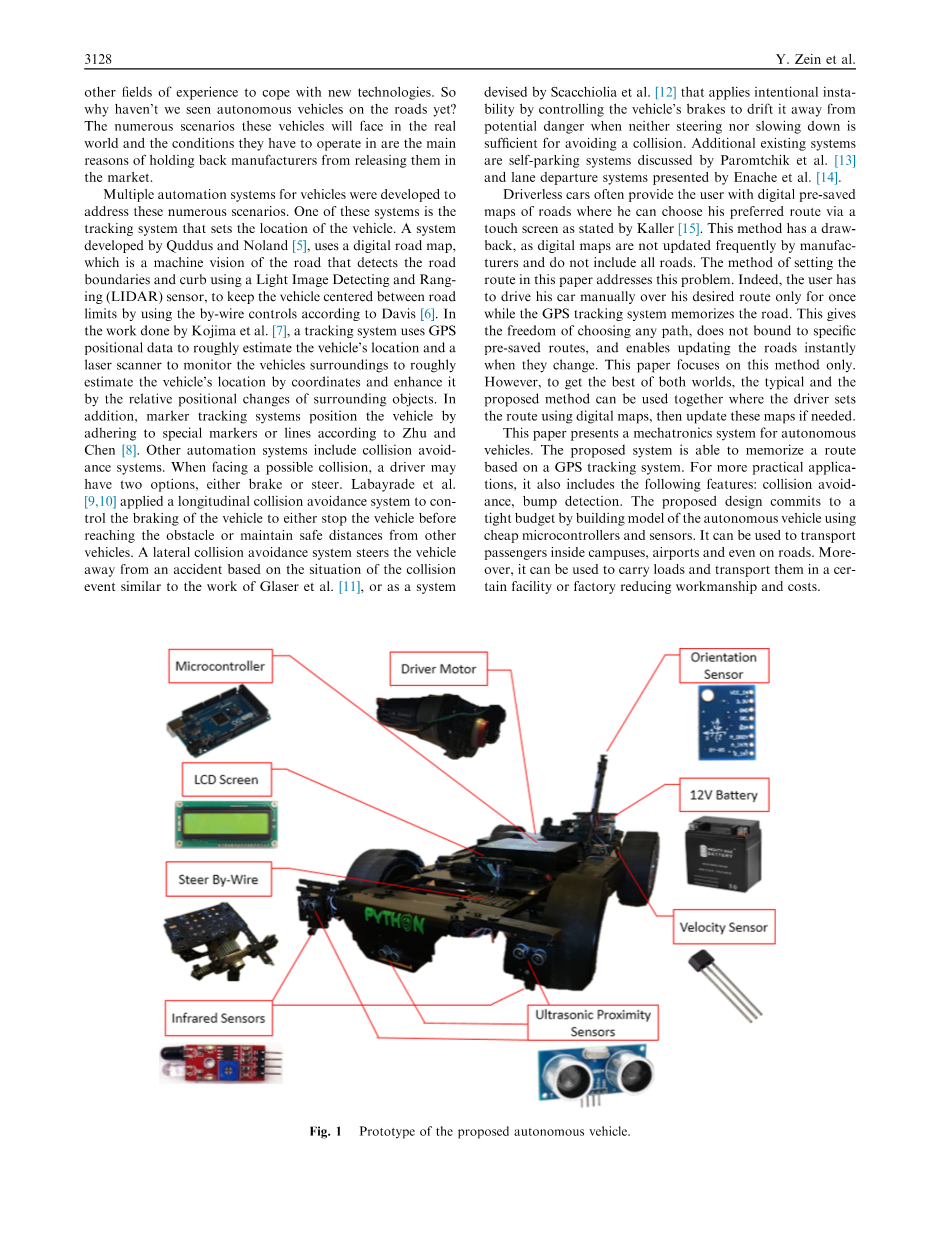
本文提出的系统是在一个基于经过修改的小型车辆的原型,具有线控控制并通过适应所有传感器和电子硬件来实现的。 它有一个金属底盘电机,变速箱传动系统和线控齿轮齿条转向组件安装在上面。 它也在中心位置使用C 语言编程的Arduino Mega微控制器,适用于分布式的多个传感器的测量仪。如图1所示,在车辆的不同位置之间。不同传感器和执行器的连接,他们在原型上的位置如图2所示。各种电子元件及其用途在表1中列出。
2.2轨迹追踪
为了能准确的自动的导航道路,司机需要在目标道路上行驶直到GPS追踪系统通过车载传感器记住了道路信息和速度传感器记录的距离。控制顺序如图3所示。
图4阐述了一条向前的直道如何被轨迹系统保存,起点是这段距离开始的基准,D通过车辆前进时速度传感器记录的速度计算得出。
这段距离结束当碰到如图5所示的弯道时。
最后的距离被保存在下一个排列中在整个自动路途中。当转向出现时,车辆当前的坐标被保存如图6所示。
当转向结束时,向前的道路再一次开始,新起点被采纳,距离如之前解释的那样测量。这一阶段在图7中阐述。如果汽车又进入另外的一个弯道,同样的程序就会进行如图8所示。
同样的程序会一直重复,直到到达了目的地如图9所示。这样追踪路径的方式让车辆能在每一次转弯时计算转角在遇到弯角的瞬间如2.3节解释的那样。
2.3自动导航
当路径已经在追踪旅途中被记住之后,车辆就能在没有司机干扰下自主的导航路径了。图9所示的一样的道路会在这一阶段被考虑。自动导航的程序如图10所示流程图解释的一样。车辆的驱动电机开启自动化在选择自动模式后。 对于向前的路径,保存的距离D与车辆所覆盖的当前距离D c进行比较。 如果D c较小比D,车辆将继续直线行驶如图11(a)所示,直到两个距离相等如图11(b)所示。
前进路径的结束表示下一个转角的开始。 因此,第一个和第二个航点被调用来计算转弯方向和角度h,如图12所示。
为了计算转弯角h,坐标,第一个航路点的经度(LAT)和经度(LON)值被从下一个航点的坐标中减去。该经度和纬度差异分别为Dk和Du,如公式所示。 (1)和(2)。
使用直角三角形的特征,角度h可以计算如图13和公式(3)所示。
这种情况仅适用于车辆接近弯道的开始,在Du线的相同方向上如图14(a)所示。 如果车辆以一定角度接近转弯如图14(b)所示,先前的计算是错误的,并且新的转角h 0应该被计算。
要计算h 0,公式(3)应修改以补偿用于入口处车辆的航向。 这个补偿 取决于通过方向传感器从正北方测量的车辆的航向角如图15中所示。
在转弯的入口点获得此角度后,可以根据象限条件和Du的标志计算角度h 0如表2所示。
表2中给出的公式将用于计算第二圈的转弯角度,在以前在图9中所示的考虑路径中,因为车辆接近转弯处,角度不是沿垂直线Du如图16所示。
如果计算的转弯角度h 0为正,则车辆应该向右转,如果是负的,车辆应该向左转向。 车辆将继续转动直到方向传感器读取旋转位移角度等于计算转弯的角度。 在达到该角度后,车辆朝着前方并重复本节中说明的相同步骤。
2.4碰撞避免
为了避免与靠近自动驾驶汽车的其他车辆和任何障碍物的碰撞,碰撞避免汽车系统是自动驾驶汽车的必备品。安装在自动驾驶汽车中的系统的版本是由三个接近的超声波传感器安装在车辆的鼻子并朝前,如图17所示。他们用于检测宽度范围内的任何障碍物。 这些传感器可以高精度的读取最远3米的距离并返回障碍物相对于车辆的确切位置。
防撞操作包括两个阶段。如果障碍物落在1米以内,则触发第一阶段车辆前方。 然后命令汽车停下来直到道路上障碍消失。 值得注意的是,第一阶段是如果至少有一个传感器读取1米内的障碍物,则被触发,如图18所示。
障碍物突然掉落在车辆前方距离小于0.5米时会触发第二阶段落。车辆会被命令执行逃避策略, 因为它不能在0.5米内完全停止而不可避免地会撞上障碍。 取而代之,车辆转向远离障碍。 如果左传感器检测到障碍物,车辆向右转向,反之亦然,如图19所示。
以下解释的逃避策略有两个序列; 第一个是图20所示,第二个是如图21所示。当障碍物突然落入0.5米以内时,车辆转向立即躲避障碍物。当障碍物不再能观测到时,车辆停止转向。
在躲避序列期间,偏离角度注意是为了保留原始朝向。 如果是车辆转过一个角度w向右,它再次转向左侧以同样的角度。 现在车辆与原车平行轨迹如图20所示。实线代表看到正常路径,虚线代表逃避路径。
第二个序列与第一个序列相反,车辆通过相同的偏角转向原始路径。 然后车辆转向右侧返回原始路径,如图21所示。
2.5 凸点检测
为了应对不断变化的道路状况,建议车辆配备凸点检测系统,道路上的任何减速带都会减慢车辆的速度为了防止损坏和妥协乘客的不适。 该系统由两个红外发射器探测器组成,安装在前轮前方并指向道路。只要传感器读取到地面的距离恒定,这意味着道路是平坦的,如图22(a)所示。 如果其中一个传感器读取的距离减小,它指的是碰撞在相应车轮前面出现 如图所示图22(b)。 然后,车辆被命令减速直到车辆通过的距离为0.7米,以便后轮如图22(c)所示,通过凸起。
3 测试结果与讨论
3.1自动导航结果
通过测试跟踪系统获得的数据被分析来完成预定设计。 保存的轨迹的现实的维度被用胶带和量角器进行测量,如图23所示。 从跟踪轨迹获得的保存的GPS坐标和距离呈现在图24中。
现在可以通过表2中转角方程计算每条曲线的转角,以第一条曲线为例,得出:
实际上,第一条曲线的角度为69,而计算出的角度为67.这是由于GPS读数中的一些误差,并且可以相对接受该误差。 在自动轨迹中,路径的实际尺寸如图25所示,其中红色1线代表保存的轨道,蓝色线代表自动轨道。
另一方面,由速度传感器测量的尺寸和根据给出的方程计算的角度显示在图26的表2中。
观察到,利用测量的距离和计算的转角获得的误差是合理的比例。 如图26所示,蓝线非常接近红线,指的是0.5至1米的误差范围保存的轨迹。 可以进一步减少这些错误通过使用更精确但昂贵的GPS模块,更准确的里程表和额外的定位系统。
3.2 凹凸检测结果
监测的参数是速度和脉冲宽度调制(PWM)值。 PWM是通过减少或增加流向直流电动机的电流用来控制驱动电机的转速的一种技术。 一旦传感器检测到凸起,PWM值下降归零,以便在通过凸起之前大幅降低车辆的速度。 然后1秒后,PWM增加到150,直到后轮通过凸起。接下来PWM恢复到原始值255,这对应于原始速度,如图27所示。图28显示了车辆的历史速度。
据观察,当PWM从255变为0,速度急剧下降;然后当PWM值增加到150时变得大致恒定。车辆的后轮通过凸起后,PWM恢复到255并且速度增加回原来的值。实验结束后,时间间隔和PWM值变化被设定为了达到合适的速度来安全越过凸起。 合适的速度介于3和3.5 km / h之间,并相应地设置PWM值。
4 总结
在本文中,提出了一个用于自动驾驶汽车的机电一体化系统。 它解决了预先保存的数字地图不经常更新且不包含所有道路的的问题。 该提议使用轨迹系统将未知道路引入传统数字地图。并 详细讨论了跟踪方法。 为了构建安全的自动驾驶车辆,还集成了一套用于避免碰撞和凸起检测的系统。 几个测试和试验
全文共5082字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[778]

