英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
宽调速高转矩能力利用过调制策略在DTC恒定开关频率的感应机控制器
Auzani Bin Jidin, Member, IEEE, Nik Rumzi Bin Nik Idris, Senior Member, IEEE, Abdul Halim Bin Mohamed Yatim, Senior Member, IEEE, Malik E. Elbuluk, Senior Member, IEEE, and Tole Sutikno, Student Member, IEEE
摘要:本文提出了一种用于直接转矩控制(DTC)恒定开关频率(CSF)控制器的感应电机的调制方法。提出的过调制方法用于扩展恒定转矩区域,从而在六步操作的磁场减弱区域产生高转矩能力。 将示出使用DTC-CSF方案的过调制操作可以通过控制从圆形到六边形形状的定子穹形轨迹来建立。 这是通过在馈送到查找表之前修改从流过磁滞控制器产生的流量误差状态来实现的。 所提出的方法的主要优点是其简单性,因为其仅需要对常规的基于DTC滞后的结构的较小修改,并且不需要空间矢量调制器。
关键词——直接转矩控制(DTC),磁场减弱,感应式电机,过调制。
一、介绍
感应电机驱动器在过调制和磁场弱化模式下工作的能力在许多工业应用中非常重要。 期望在宽的速度操作范围内实现高恒定的功率和最大转矩。
几篇论文已经发表[1] - [14],提出了其他类型的解决方案,以实现最大扭矩能力在减弱区域。最常见的方法是基于逆变器电压和逆变器电流的最大值来优化最佳化。 通常,所使用的算法需要帧变换器,机器参数的知识和空间矢量调制器。例如:
手稿收到2010年6月24日; 2010年11月8日,2011年2月27日和2011年9月5日修订;接受2011年9月6日。当前版本的日期2012年2月27日。建议由副编辑F. Blaabjerg出版。 AB Jidin,NRBN Idris,AHBM Yatim和T. Sutikno与马来西亚科技大学能源转换系,Skudai,81310 Johor,马来西亚(电子邮件:ajudin@fke.utm.my; nikrumzi@fke.utm。 my; halim@ieee.org; tsutinko@fke.utm.my)。
M. Elbuluk与美国阿克伦大学Akron 44325-3904 OH电子计算机工程系(电子邮件:melbuluk@uakron.edu)。
本文中一个或多个图的颜色版本可在http://ieeexplore.ieee.org在线获得。
数字对象识别符10.1109 / TPEL.2011.2168240
Sang-Hoon和Seung-Ki [3]使用面向控制空间矢量调制(FOC-SVM)来考虑电压和电流极限条件,以计算可控电流(在定子电流参考系中)弱化区。其他论文报道了一个鲁棒的弱化策略,因此用于计算最优流动的机器参数的任何变化都可以补偿[5],[9],[11],[14]。
一般来说,SVM技术被用来利用逆变电压到过调制区域,其中电压参考通常用于定义过调制的模式[15]。 SVM充分利用可用逆变器电压的能力主要取决于矢量控制策略,以产生最大可能的电压参考,同时保持FLUUX和转矩的调节。已经提出了各种方法来估计电压基准[13],[16] - [22];例如,在直接转矩控制(DTC)-SVM的情况下,Tripathi等人[17]利用定子电流误差矢量的预测控制来估计参考电压。[16]利用几个复杂的方程组,利用几个复杂的方程来实时生成参考电压。在各种方法[12]和[13]在[6]中,由于定子电流轨迹的六边形,电流包含低频谐波分量,使其在稳定状态条件下工作。另一方面,Tripathi et al。 [13]通过使用SVM的过调制实现了六步模式操作。最终,所有提出的方法[13],[16] - [18],[21],[22]复杂化了DTC驱动系统的基本控制结构,最初在[23]中提出。
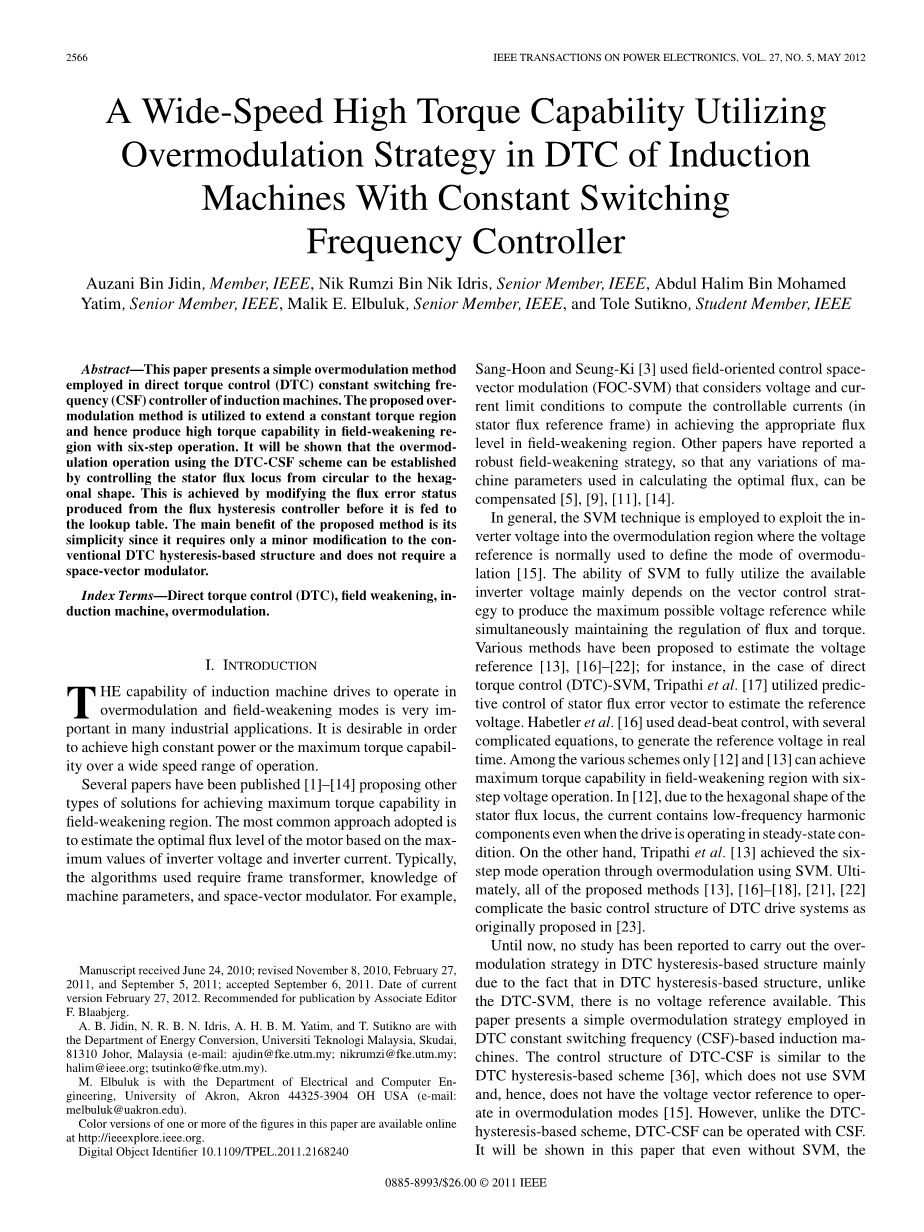
图1基本的DTC磁滞感应电机的结构
直到现在,还没有研究报道进行过调制策略在DTC hysteresis-based结构主要是由于这样的事实,在DTC hysteresis-based结构中,不同于DTC-SVM,没有可用的参考电压。本文提出一种简单的过调制策略用于直接转矩恒定开关频率(CSF)的感应的机器。DTC-CSF的控制结构是类似于DTC hysteresis-based方案
[36],而不使用支持向量机,因此,没有参考电压矢量在过调制模式
[15]。然而,与DTC hysteresis-based方案不同,DTC-CSF可以与CSF操作。这将是本文所示,即使没有支持向量机,逆变器电压可以逐渐从脉冲宽度调制(PWM)六步模式通过改变定子磁通轨迹从圆形到六角形状。通过这种方式,可以实现恒转矩区域的扩展导致更高的扭矩在场强减弱地区的能力。通过使用这种技术,也有可能操作驱动的六步模式在加速(减速),恢复到PWM模式当达到稳态条件,基于以外的操作速度。在第二部分中,恒频转矩控制器的DTC是简要讨论。第三部分解释了转矩能力DTC和描述过调制实现基于定子磁通轨迹转换。第四部分提出了改善转矩与拟议的过调制策略能力。第五部分描述了该控制结构。第六部分介绍了该方法的硬件实现和实验结果。最后,第七节中给出了结论。
二、DTC与CSF方案
不像磁场定向控(FOC),DTC方案如图1所示,提供了一个简单的控制结构,可以分别控制转矩和磁通使用三级和二级迟滞比较器,分别。比较器的输出和定子磁通角是用来索引查找表的最优电压矢量作为[23]提出,以确定适当的电压矢量控制转矩和磁通。然而,磁滞力矩控制器利用基本DTC结构结果的两个主要的缺点,即变量逆变器开关频率和高转矩脉动。提出了几种方法来克服这些问题。例如,使用的变量滞后的问题最小化乐队[24],[25],[26]抖动技术,控制占空比周期技术[27],[28],空间矢量调制(DTCSVM) [21],[29]-[31],最近使用预测控制[32]-[35]。
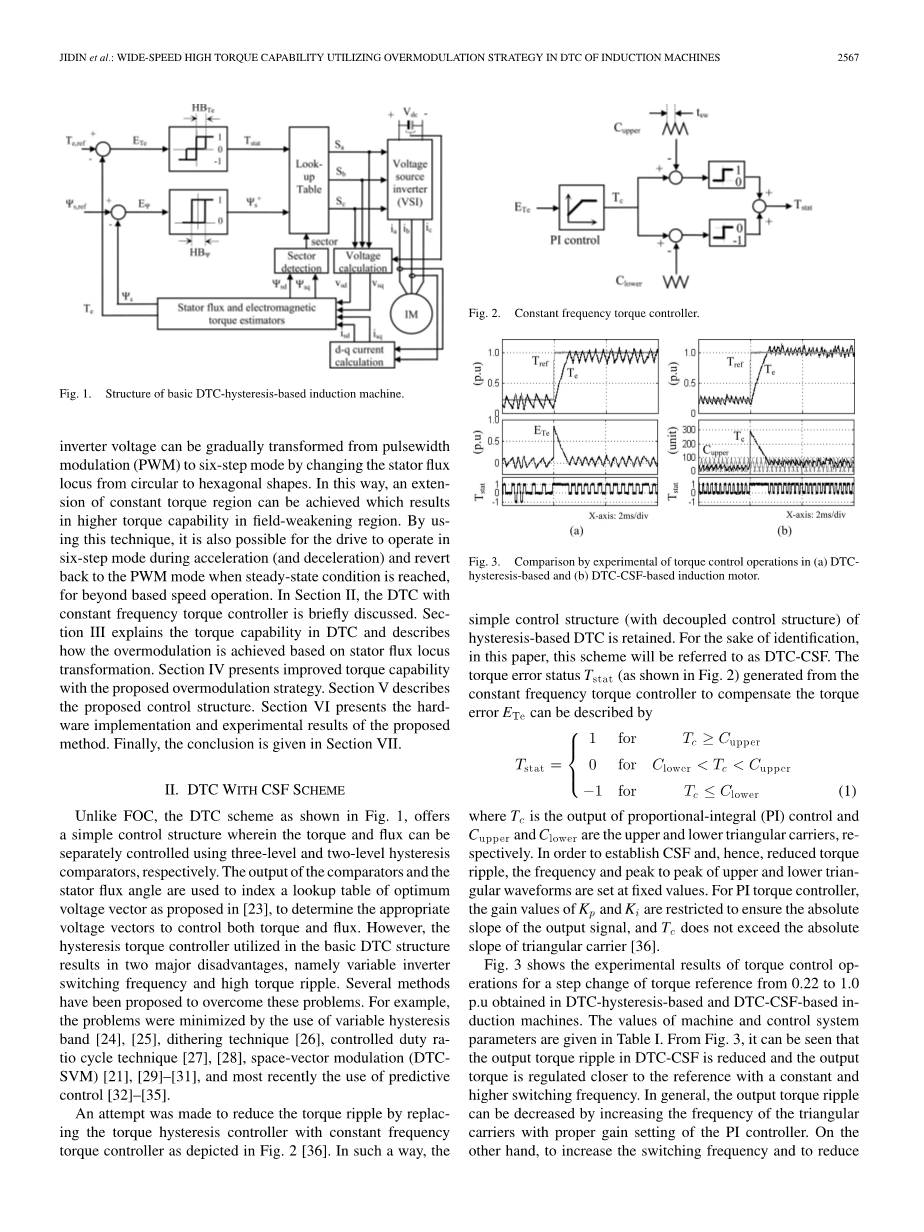
图2 恒频转矩控制器。
图3 在基于DTC滞后(a)的和基于DTC-CSF的感应电动机中(b)的扭矩控制操作的实验比较。
试图通过用如图2所示的恒定频率转矩控制器代替转矩磁滞控制器来降低转矩波动。 以这种方式,保留了基于滞后的DTC的简单控制结构(具有解耦控制结构)。 为了识别,在本文中,该方案将被称为DTC-CSF。 从恒定频率转矩控制器产生的用于补偿转矩误差ETe的转矩误差状态Tstat(如图2所示)可以描述为
其中Tc是比例积分(PI)控制的输出,而Cupper和Clower分别是上三角载波和下三角载波。 为了建立CSFand,因此降低转矩波动,频率和峰值上限和低频矩形波形的固定值。对于PI控制器,Kp和Ki的增益值限制了输出信号的绝对斜率,Tc不超过三角载波的绝对斜率。
表格1
感应电机器参数,基于迟滞的DTC和基于CSF的DTC驱动器
显示了转矩控制操作的实验结果在阶跃变化的扭矩参考从0.22到1.0便士。你获得DTC-hysteresis-based和DTC-CSF-based感应的机器。机和控制系统参数的值在表i从图3可以看出,输出转矩脉动DTC-CSF降低和输出转矩调节接近参考与一个常数和更高的开关频率。一般来说,输出转矩脉动可以减少通过增加的频率三角航空公司通过适当的增益设置的PI控制器。另一方面,提高开关频率,降低转矩脉动的直接转矩hysteresis-based,理想情况下可以减少滞后乐队之一。这可能会导致不正确的电压矢量选择(Tstat =minus;1),将导致快速增加在输出转矩,因此减少转矩脉动,而不是减少它[36]。
三、DTC控制转矩能力
基于DTC控制的感应电机行为可以在以下定子磁通参考系中来描述
其中p是极数,delta;sr是定子磁通和转子磁通和通量向量的夹角,omega;s定子角频率通量,omega;r是转子角速度,Ls,Lr,和Lm是电机的电感,sigma;是泄漏系数。泄漏系数sigma;已给定为
在实践中,一个额定定子磁通和逆变器电流限制(即。150 - 200%的额定电流机)用于获取最大扭矩能力。最大输出转矩可以被保留,只要转子转速不超过其基本的操作速度。根据公式(6),角delta;sr在控制输出转矩起着至关重要的作用。因为角delta;sr主要取决于滑角频率(omega;sminus;omega;r),维持输出扭矩的最大值,滑的角频率(omega;sminus;omega;r)必须始终保持在它的最大价值。这通常是建立了速度低于基础速度的原则。
图4在特定位置用于低速操作(a)和高速操作(b)的相量图。
图4说明了相量图(2)在稳态条件下的操作速度[见图4(a)]和基础速度(见图4(b))。对于每个向量图,使用相同的定子磁通矢量的大小和向量在定子磁通dq参照系。在低速的情况下操作,反电动势,jomega;sPsi;s足够小,这样可以生成足够的定子电压来控制定子磁通和转矩,同时进行。基础速度(参见图4(b)),定子电压矢量触动六边形定子电压边界限制。因此,有两个方法来进一步提高基地外的速度,同时保持最大扭矩能力。
1)削弱磁通量(在正常的情况下与速度成反比),所以矢量的大小jomega;sPsi;s随着频率的增加而增加。然而,d分量的定子电流将减少。在这种情况下,平均定子电压将保持六角边界和定子磁通是规范使用两个活跃的电压矢量。这时发生在DTC hysteresis-based驱动磁通轨迹是圆,没有过调制是利用定子电压。
2)在过调制模式下运行逆变器;从而平均定子电压将超越六角边界限制。在正常的实践中,获得最大电压向量(即六步模式),参考电压矢量的SVM修改
[15]。一旦达到六步电压,以进一步提高速度,电流将会削弱。这种方法可以执行基于SVM的DTC。这种方法不能应用于DTC hysteresis-based启动,因为没有可用的定子电压参考实现过调制。
基本上这两种方法将确保(omega;sminus;omega;r)保持最大值。在第一种方法中,零电压矢量不可用;因此,角速度的定子磁通将会增加。随着速度的增加,更切向电压矢量的选择,因此,提高定子磁通角速率。在第二种方法中,零电压矢量也不可用。定子的角速率通量增加,因为两个向量之间的交流,而是一个电压矢量正逐渐从PWM波形逐渐变化应用于六步模式。磁通量将只被削弱一次六步电压。这意味着在第二个方法中,恒转矩区域扩展自电压能力增强。
前面的讨论表明,在较宽的转速范围内最大扭矩控制是和延长定子角频率的限制flUX或定子电压限制的能力密切相关的。在本文中,提出了一种采用过调制的方法。。但是,与其他调制方法相比,使用支持向量机(第二种方法)较为合适,该方法是基于DTC hysteresis-based结构,其中没有包含参考电压矢量。
四、改进的扭矩能力与建议的过调制策略
本节介绍了提出的过调制策略,以提高转矩在宽速度范围操作的能力。该方法不同于基于SVM的系统,其中参考定子电压可用,并且通过修改参考电压实现过调制。DTC中可用的参考电压 -CSF,通过逐渐地将PWM电压波形转换为步进模式来实现过调制,其通过将定子匝轨迹的形状从圆形变换为六边形来实现。由于DTC-CSF使用与DTC滞后相同的结构 控制结构简单,但可以实现CSF和减少的转矩波动,而不需要SVM。 本节将首先讨论如何通过对定子电流轨迹进行整形来实现PWM到六步模式运行,而无需解决基于DTC-SVM的驱动。 接着,使用所提出的过调制在场弱化模式下的操作进行说明。
- 将定子电压操作扩展到六步模式
图5 电压矢量和定子磁通轨迹的映射图
在基于SVM的系统中,当参考电压矢量超过定子电压六边形轨迹时,过调制开始。每当超过六边形限制时,参考电压将被修改[15]。如果修改的参考电压沿着六边形轨迹移动,合成电压将没有零电压矢量。在基于DTC滞后的驱动中,当实际(或估计)转矩未达到参考转矩时,将不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141844],资料为PDF文档或Word文档,PDF文档可免费转换为Word

