英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
稳定波状摆动游泳中速度对大嘴鲈鱼中线运动的影响
总结
我们通过对高速录像进行逐帧分析,来确定大嘴鲈鱼在五个标准速度(0.7, 1.2, 1.6, 2.0和2.4 Ls-1,其中L为总长)下进行稳定游泳时其中线的运动。通过结合从X射线照片得到的形态学数据和每条鱼的中线的数学重建,我们确定了椎关节和尾下骨和四根等距的尾鳍骨头的横向位移(zmax),侧向屈曲(beta;max)和中线与前进方向之间的夹角(theta;max),方差分析解释了游泳速度与纵向位置对描述振幅、相位和波长等变量的影响。zmax、beta;max、theta;max的振幅在大约25%L位置到尾鳍顶端之间大致上以非线性方式增长,与游泳速度相关的最大增长发生在0.7到1.6 Ls-1之间。对于口鼻部、第一根尾椎骨和尾鳍边缘,zmax的平均值随着速度的增加,分别从0.004L增加到0.012L、从0.005L增加到0.012L,从0.053L增加到0.066L。从头盖骨到第一根脊椎骨、躯干到尾椎之间和后尾椎骨,beta;max的平均值随着速度增加,分别从1.2°增加到1.7°、从0.6° 增加到0.9°、从1.4°增加到2.2°。对于每个游泳速度,尾鳍末端的beta;max通常要比尾鳍近端的要高两倍以上。令人惊讶的是,在一个给定的纵向位置,最大横向位移和最大侧向屈曲并不是同时发生的。与之相反,与beta;max相比,zmax的相位偏移通常为六分之一个周期。此外,zmax和beta;max的相位偏移随着游泳速度的增加发生了显著的变化。尾部结构的冲角周期性地从负值到正值进行变化。尾鳍远端的最大冲角变化范围为5°到17°,随着速度改变而显著改变,但是变化幅度小于尾下骨的末端。平均摆尾频率随着速度增加而显著变化,从2.0 Hz增加到4.2Hz。随着游泳速度的增加,估计出的波传播速度表现出相当大的纵向变化性,并且游泳速度与后波波速的比率从0.59增加到0.83。
关键词:运动,鱼,游泳,动力学,大嘴鲈鱼,大口黑鲈
简介
轴向结构的波动起伏是水生脊椎动物最普遍的运动形式。因此,对于不同的脊椎动物,稳定波状摆动游泳的许多运动学特征已得到了很好的描述(Gray, 1968; Webb, 1975; Lindsey, 1978)。不同的物种以及同一物种在不同的运动速度下,已知的波状摆动的游泳的关键特征包括以下物理量:(1)身体波动起伏的长度;(2)波状摆动的频率;(3)横向位移的振幅;(4)推进波的长度(Gray, 1968; Lindsey, 1978)。大多数将波状摆动生物的这些属性与其解剖学关联起来的尝试都集中于外表面面积的分布上(Webb, 1982, 1988)。为了进行流体动力学建模,外部形态和描述波波形和速度的参数通常足以对不同物种和不同速度和不同波形的能量和相对效率进行大量的预测。
然而,为了弄清波状摆动游泳性能的功能基础,还需要确定内部形态与外部可见的运动有什么关系。将内部形态与运动功能联系起来的一个极为重要的变量是侧向弯曲(屈曲),因为皮肤和肌肉的张力与轴向关节的运动和侧向屈曲都是是成比例的。不仅如此,这些组织的力学行为还同时受到侧向屈曲的振幅和频率的影响(Wainwright, 1983; Long, 1992; Rome et al. 1993)。然而,与其它波形参数相比,侧向屈曲的程度和/或时间仅在部分物种处得到了量化(Grillner and Kashin, 1976; Videler and Hess, 1984; Williams et al. 1989; van Leeuwen et al. 1990; Rome et al. 1988)。除最近的研究工作外,先前对游动的鱼类的侧向屈曲进行的研究工作一般是使用曲率半径,并没有包括估算椎骨屈曲所需的脊柱和尾巴部分的直接解剖测量值。因此,对现有的脊椎动物在波状摆动游泳时弯曲的数据进行解释的工作,由于外形和椎骨骨骼数量的差异、内部解剖数据的缺乏和已研究过的不同亲缘发育关系的分类系统的巨大差异而变得异常复杂。
这项关于稳定游动时大嘴黑鲈的中线运动的研究是我们所进行的两种淡水原生中柱鱼类的一系列研究中的一项,旨在阐明形态变化对运动能力的影响。我们选择的两种淡水原生中柱鱼在外部形态上有相当明显的差异:M鲈鱼有着大致上成梭形的体形,Lepomis鲈鱼则拥有比较比一般鱼类的标准长度长大约40%的体长(Jayne and Lauder, 1994)。然而,这两种鱼的脊柱骨数量大致上是相等的(Scott and Crossman, 1973; Mabee, 1993),这有助于进行成对比较,从而隔离外部形状对运动功能和性能的影响。
目前的研究有着以下这些目的:首先,对于每一条鱼,我们使用(从X射线照片中获得)的中线骨骼各段长度的解剖学数据将描述鱼中线的数学函数划分为离散长度。这使得我们能够预估沿着鱼长度的一些特定结构标志的运动学参数。其次,为了重建鱼的中线,我们量化了(1)横向弯曲;(2)横向位移;(3)相对于整体行进方向的方位。然后,我们量化了这三个运动事件的时间以确定它们的传播速率。接着,我们考察了这三个运动事件之间的相位关系,对于单个物种来讲,它们并不是同时被确定的。最后,我们考察了上述数量与关系是否随着不同游泳速度和不同的纵向方位而变化。我们尽可能多的检查解剖学上定义的纵向位置以弄清沿着鱼类的全长而发生的事件,并且采用了合适的实验设计来促进将来对蓝鳃太阳鱼和其他具有不同形态的物种的比较。
材料和方法
实验对象和协议
我们从加利福尼亚州南部和中部的池塘中获得了五种大嘴鲈鱼。我们对鲈鱼喂养金鱼和蚯蚓作为维持性饮食,并且在在实验前喂养了大约3个月。所有的鱼都维持在20plusmn;2℃的恒定温度,这与实验中所使用的水温(20plusmn;0.5℃)大致相同。较大的个体被安置在84升的储罐中,而较小的个体则被安置在42升的储罐中。
对于其中四个个体,总长度(L),标准长度(SL)和质量的平均值(以及范围)分别为24.5 cm(23.9–25.1 cm)、20.5 cm(20.1–21.0 cm)和165 g(145–174 g)。对于另外一个个体,相应的量分别为18.4 cm,15.4 cm和111 g。我们尽可能使用与在平行实验中所使用的蓝鳃有着相似质量的鲈鱼个体。鱼的尾部深度(B)的平均值约为0.27L,背鳍和直肠附近的最大跨度接近0.29L。在我们进行观察的游泳速度的范围内,我们发现鲈鱼的软背鳍和臀鳍并没有完全伸直,鱼的该区域的最大垂直距离的平均值约为0.26L。使用Webb(1988)的方法,大个体和小个体的湿表面积分别接近270平方厘米和145平方厘米。经过一些额外的实验后,鱼被储存起来并拍摄X射线照片以确定各种轴向骨骼结构的数量和长度,包括头骨、单根椎骨的中心以及尾骨的突起和尾下骨相加起来的长度。
我们使用校准过的流量罐来获得稳定的游动,每条鱼以平均0.7、1.2、1.6、2.0和2.4Ls-1的速度向前游动。流动槽工作部分的尺寸为18 cmtimes;18 cmtimes;46 cm,其中长度方向与水流平行。在实验之前,流速是通过对亚甲蓝染料云进行高速摄像来确定的,染料沿着工作部分的高度和宽度以2到3厘米的间隔注入,接着我们生成了关于流量的校正曲线并显示到流速计的电子显示屏上,它指示了流量罐中螺旋桨的转速。我们只分析游动位置在底部以上和在水面以下3 cm的鱼的序列。此外,我们差不多总能成功地使鱼在流量罐中位于中间的位置,结果显示大鱼和小鱼缺口跨度比分别接近1.2和1.6.。我们采用严格的标准来选择稳定的游动,仅分析逆流—顺流游动中每次摆尾幅度小于3 mm的序列。除了最高的两个速度以外,逆流游动和顺流游动的位置的变化在整个分析周期里通常小于3 mm。因此,各序列中不同摆尾之间的正向游泳速度的变化小于5%。
图像获取和分析
我们使用两台高速摄像机(NAC HSV-400)以200帧/秒的操作速度得到了鱼游动的录像。流量罐下方的一面镜子给摄像头提供了直接的腹侧视图,第二个摄像机得到的是横向视图。横向视图被用于确保鱼的中心在水面和罐底之间。大多数运动学分析是建立在鱼的腹侧视图的基础上的,它使用两个500 W的超压强烈溢光灯点亮。对于每个游泳速度,我们分析的时间间隔比四次摆尾的时间要稍微长一些。对于每个序列,我们选择的视频图像间隔约为1/20摆尾。每次分析的摆尾图像的数量约为16到23。
|
|
|
图1 |
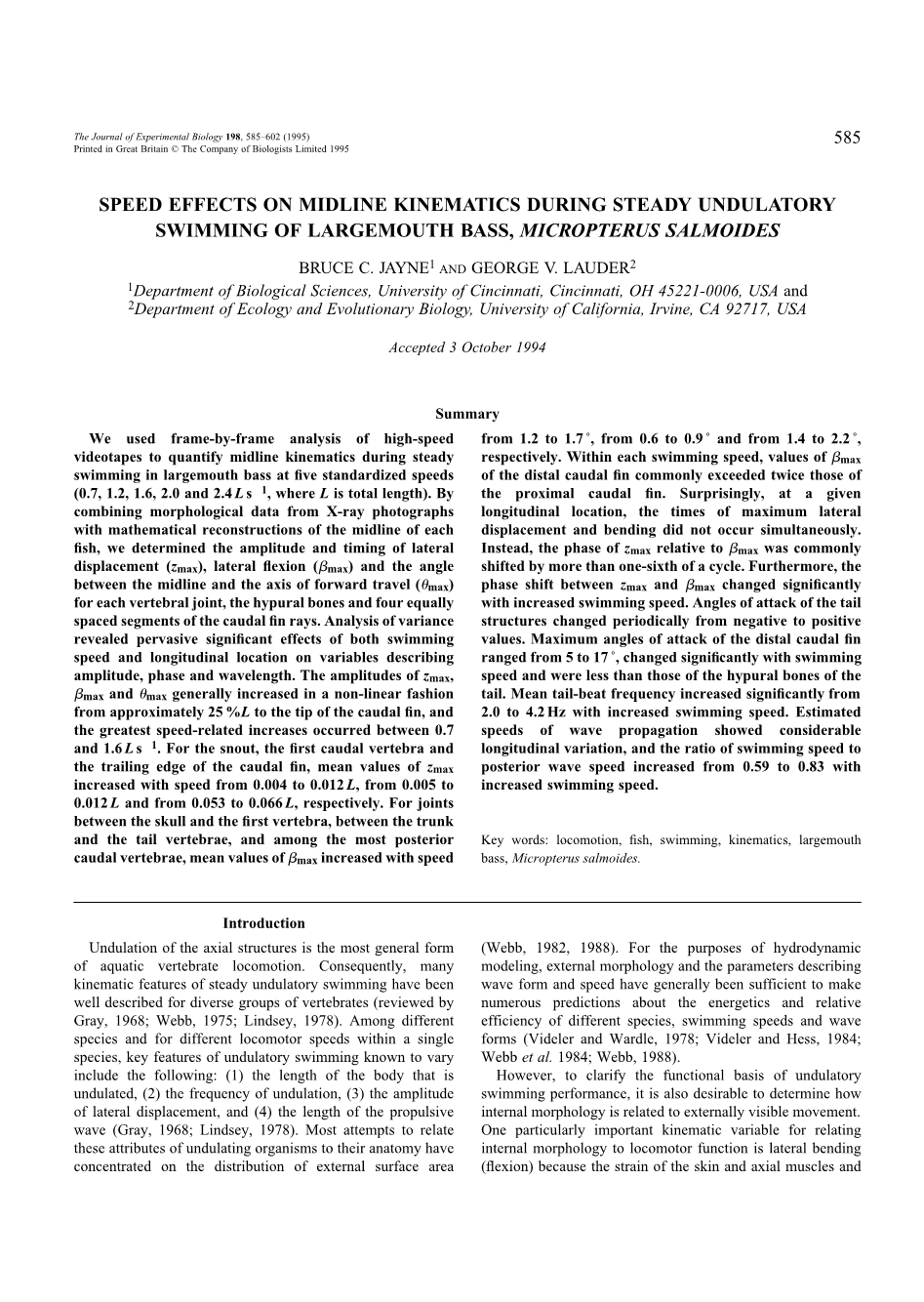
图1展示了鱼的中线的重建方法。其中(A)鱼的轮廓被数字化;(B)左右两侧都被拟合为三次样条函数;(C)使用描述两边轮廓的三次样条函数,由计算机算法迭代产生30个中线上的点;(D)用这30个点拟合出一个描述中线的三次样条函数;(E)使用X射线照片确定的各种的轴的长度分割中线,这些数字指统计分析中使用的标准化解剖位置(见表1)。
图1总结了关于定制软件的五个关键步骤的顺序,我们用它来逐帧分析腹部图像。(`)左侧和右侧数字化为25到30个点,(图1A);(2)一个三次样条函数,用它算出500个点,然后构造出每条鱼每侧的平滑轮廓线(图1B);(3)使用一个计算机迭代算法和构成重建轮廓的1000个点来确定30个点,这些点同距离它最近的左右两边的轮廓点之间的的距离是相等的(图1C);(4)对于这30个点,使用三次样条函数来生成由500个点组成的表示中线的平滑曲线(图1D);(5)从最前面的位置开始,按照下面详细描述的轴向骨骼结构进行分段,其长度与各段结构相等(图1E)。
使用步骤2和4(图1B、C)中提到的三次样条多项式,样条的第一个三次多项式是拟合点1到6(其中点1是最前面的),第二个多项式对应点2到7,依次对应。多项式加权使得两个多项式能够重叠(比如对应点2的最先两个多项式)从而在该区域形成连续曲线。在初步分析中,我们将重建的轮廓直接覆盖到视频图像上以确保我们三次样条多项式的采样间隔与原始图像紧密匹配。因为在腹部(或者背面)视图看到的鱼缺乏严格的同源标志,一个类似于在形态测量中缺乏地标的形态学研究的技术问题被提出了。因此,我们选择了中线重建的方法,它与中轴值法很相似,被用于轮廓形状的形态学研究(Straney, 1990)并且已经证明了可以用不同的傅里叶法来进行形状分析。与波动中鱼不断改变的两侧长度相比,轴骨骨骼的长度相对恒定。因此,将中线划分为代表骨骼长度的部分,为分析游动中鱼的轮廓的这个困难的问题提供了部分但并非完美的解决方案,因为它缺乏大量清晰可辨的同源地标。
在实验完成后,鱼被保存并从侧面获取鱼的高分辨X射线照片(使用Hewlett-Packard Faxitron X射线系统)。通过X射线拍照,鲈鱼的每个轴向结构的长度都被数字化了。具体地说,从每条鱼的X射线照片中,我们测量了头骨、每一根椎骨和脚骨以及尾椎骨的长度。可弯曲的尾鳍片被分为5个长度相等的段,我们用上面所有的测量结果来划分重建的中线(图1E)。因此,对于沿中线的每个节段关节,我们生成一个包含其x坐标和z坐标的文件和每个关节相邻段的夹角b。用x坐标和z坐标来计算每一个中线段的端点,然后计算出一个单独的线段的方向和整个行进方向的夹角。为了校正不同个体之间微小的差异,我们将所有线性测量值转换为以总长度(L)为单位的值。使用来自尾鳍边缘的数据(图1E,部位12),绘制z坐标与时间的关系曲线用于确定每次摆尾的周期和其倒数——摆尾的频率(单位为Hz)。
|
|
|
图2 |
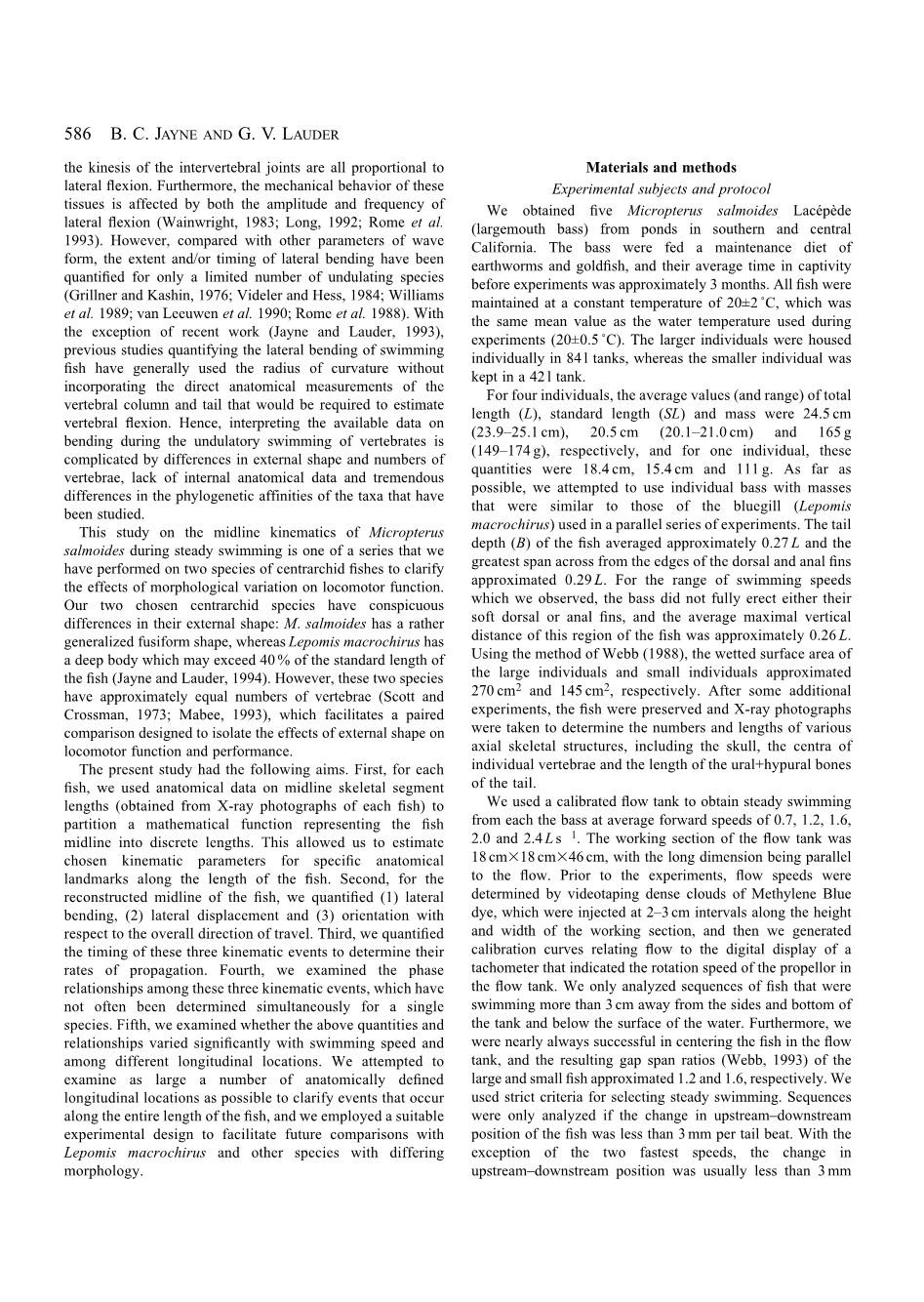
图2是计算一个单一位置所假定的正弦运动的运动学变量时的约定,以及对运动学变量的相位关系的预测。(A)坐标轴的方位,较细的点划线表示一个轴向位置的运动(0%、25%、50%和75%周期)。所有向前的方向(平行于流量和流量罐的长轴的方向)由x坐标指示。侧向位移和它的振幅分别为z和zmax。在A和B中,较大的点表示中
全文共6786字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[10016],资料为PDF文档或Word文档,PDF文档可免费转换为Word

