英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
翻译1
基于驾驶员车辆特征演化的城市路网车辆群逆向重建方法研究
在交通流管理理论中,特别是主动车辆安全性研究中有一个经常涉及的概念,那就是车辆群状况。车辆群状况是由目标车辆和相邻的交通实体组成的动态排列的状态和态势的集合。深入研究车辆群态势对城市道路交通安全具有重要意义。我们以三车道为条件进行举例,综合考虑目标车辆及其邻近车辆的特点,对车辆群状况进行了重组,并应用伽玛分布理论对目标车辆在研究结束时的车辆群状况进行了辨识分析。从驾驶员车辆特征演化的角度出发,提出了城市路网中车辆群态势的逆向重建方法。从实际驾驶、虚拟驾驶和仿真试验得到的结果可以表明,这种新式研究方法所建立的模型是合理可行的。
- 介绍
由动态交通实体构成的车辆群状态是城市路网中交通状况的核心内容。准确地研究车辆群状态的简化方法,对于研究交通流理论和主动车辆安全具有重要意义。交通状况的评价和预测在以往的研究中都有涉及。 k,afer, C. Hermes, C. Wuml;ohler, F. Kummert, and H. Ritter, 等人在相关书籍中研究了在交叉口中涉及两辆车辆的情况。他们在运动数据库的基础上,提前2 - 4秒估计了两辆车的运动轨迹,并利用预测的轨迹识别和预测交通状况。通过实际驾驶试验得到的gps数据对模型进行验证,结果表明,该方法能够在车辆到达交叉口中心前1.5~3秒内正确识别。Meyer Deliusetal提出了一种模拟和识别交通情况的概率方法。在他的理论中,交通状况被定义为一系列的状态。其应用实际意义,就是利用Hidden Markov模型得到典型交通场景的交通状况概率分布和演化规律。在以往的研究中,并没有充分考虑驾驶员在复杂多变的驾驶场景中的行为特征,缺乏对汽车群体状况的系统研究。双车道案例中的车辆组情况分析方法由张等人根据目标车辆及其邻近车辆的空间分布情况在他们的文章中进行了划分和简化。简化的车辆组情况数据采集包括八个州。在此基础上,王等人由得到的数据进行了大量的研究,研究了三车道车辆群的划分和简化方法。但是在以往的研究中,只有在车辆分组情况的划分和简化过程中,才考虑车辆的位置分布,忽略了其他车辆、车辆类型和驾驶员特征(如驾驶倾向)等对其的影响。王等人在他们的新研究中考虑到车辆类型、速度区别的特点,定位在对速率敏感的地区建立起汽车群状况的欣达维数学问题模型,在工程实际工程量的问题上研究其数学表达。但是,没有考虑驾驶员特征对车辆群状况的影响。
GPS的出现和发展为许多领域的数据采集提供了一种新的方法。同时,随着GPS的广泛应用,隐私泄露问题也日益突出。由于隐私泄露的位置和轨迹,屡屡发生被骗、财产损失甚至伤亡的案件。因此隐私权保护成为全社会关注的焦点。交通工程领域的许多学者都非常重视对隐私权保护的研究。桑和本在他们的论文中提出了一种基于移动交通传感器采样车轨迹的信号交叉口车辆轨迹重构方法。以往的研究主要集中在城市规模交通的知识提取上,忽略了城市交通精细化的知识提取。在此基础上,本和格鲁特斯总结分析了城市交通精细化的知识。他们将基于代码签名的交通建模技术和隐私保护算法相结合,提取城市交通精细化的知识,并对交通信号控制系统的性能进行评价。研究人员指出,他们在城市道路交叉口的隐私保护方面进行了研究,而对主干道的隐私保护模型(包括一些交叉口)和动脉网络将是进一步研究的研究重点。我们应当发展开发适合不同城市的隐私保护技术。
目前,交通工程领域很少考虑隐私保护与交通应用的结合。由于GPS的普及率低以及人们对隐私保护的意识越来越强,研究人员很难收集到所有车辆的驾驶信息。此外,即使获得所有车辆的驾驶信息,我们也难以处理如此大量的数据。因此,如何能用较少的信息去研究相关问题具有重要意义,有利于隐私权保护和解决交通问题。鉴于此,本文以三车道场景为例,深入研究了在驾驶员隐私保护的前提下车辆群态势的约简方法。我们先对感兴趣区(包括目标车辆)的类型、相对距离和相对速度以及目标车辆驾驶员的倾向性进行分组。然后基于驾驶员车辆特征的演化,建立了基于目标车辆轨迹数据的城市路网车辆群态势反求推理方法。最后,通过实际驾驶、虚拟驾驶和仿真实验验证了该方法的有效性。验证结果表明,该方法在穿透率为20%时,准确率可达79%。在驾驶员隐私保护的前提下,基于驾驶员车辆特征演化的车辆群态势逆向重建方法的研究,不仅可以改进智能指挥系统,而且为研究和改进基本交通流模型奠定了基础。
- 相关工作
2.1汽车集团状况划分
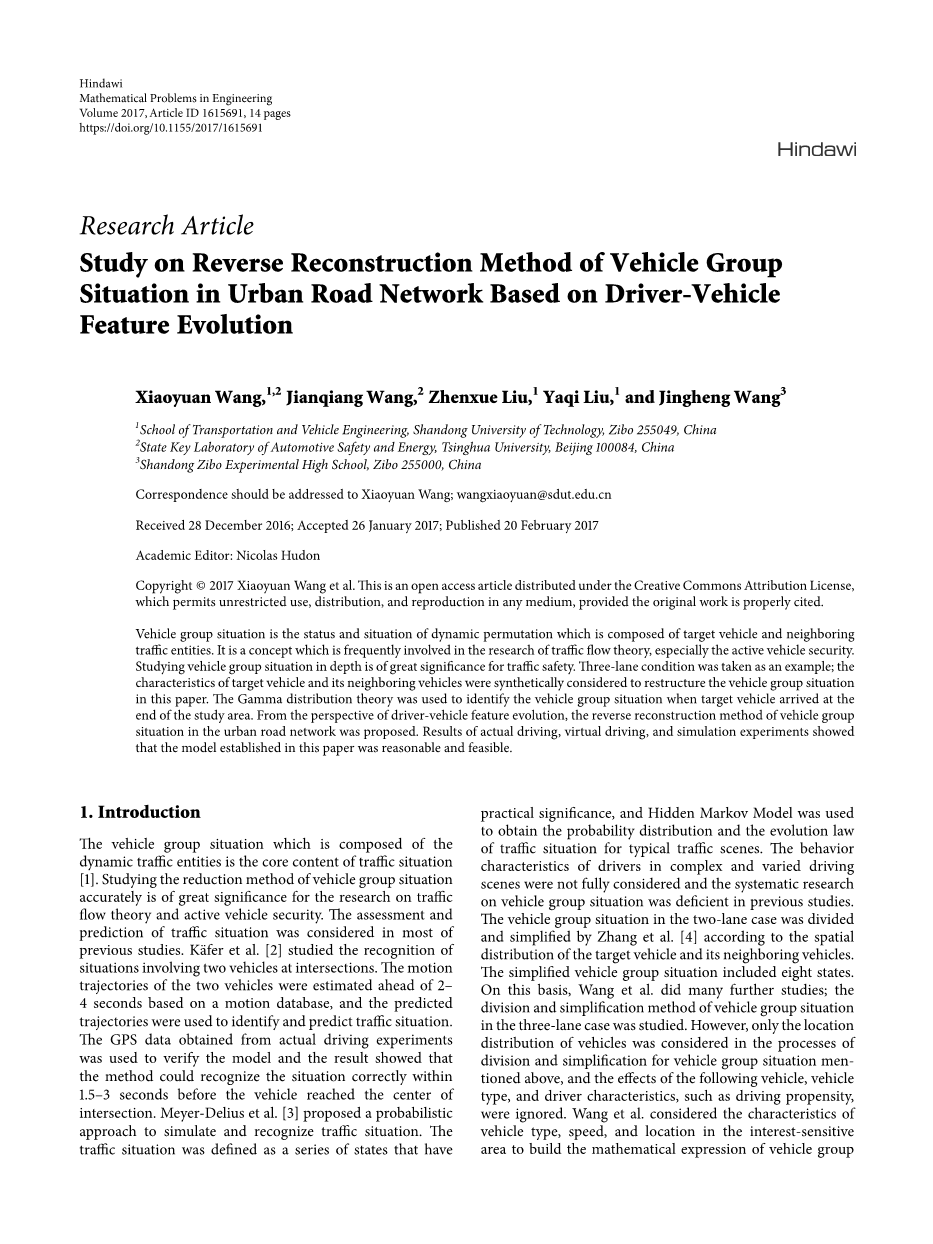
在三车道场景中,以目标车辆前保险杠为分界线,目标车辆在中间车道、左车道和右车道的3种感兴趣区域如图1(a)、1(b)和1(c)所示。
我们对感兴趣区(包括目标车辆)的类型、相对距离和相对速度以及目标车辆驾驶员的倾向性进行分组。用“力”的概念描述了各分区内车辆对目标车辆的影响。用一组力(分为斥力和吸引力)抽象地描述目标车辆所在的车辆群情况。文献中引用了力的计算方法。分汽车集团的情况如图,其中1,2,hellip;,16,分别表示在三车道的场景16种汽车集团的情况。符号“ ”为代表的吸引力,和“minus;”为代表的排斥。
2.2基于伽马分布的车辆群态势识别方法。
车辆到达道路横截面时的车头时距可用伽马分布来描述。本文假定车辆到达终点时的车头时距服从工程分布中的伽玛数学问题。Gamma;分布的概率密度函数如下所示:
在公式(1)中,k是形状参数,是尺度参数,并且x服从于伽马函数Gamma;。我们根据历史数据可获得相应的k和的参数。然后,可以得到最佳的车头时距。
对目标车辆及周边车辆的位置分布如下图所示。
目标车辆位于研究区末端时车辆群态势识别步骤如下:
1)在VTL 1和VTL 2不同分区目标车辆及周边车辆当目标车辆位于VTL 2获得到达时间。在VTL 1和VTL 2目标车辆到达n1点时,左前方车辆2,左后车3,前车后车4,5,右前和右后车辆6,车辆7被分别标记为t1,t2,t3,t4,t5,t6,t7和n1, n2, n3,n4,n 5,n 6,n7。根据时间信息,分别做以下工作:(a)计算旅行时间的实验车T=ti-ni,i= 1,2,hellip;,7,然后识别类型和基于贝叶斯决策树模型的动态识别目标车辆司机的倾向(b)计算出目标车辆与车辆之间的其他实验vtl2到达时间的差异。计算在2和3之间vtl2实验车辆到达时间的差异。计算在6和7之间vtl2实验车辆到达时间的差异。(c)根据Delta;23,Delta;41,Delta;51演绎在利率敏感地区的非实验车辆的数量,和Delta;67和车头时距的最佳模式。(d)计算各试验车辆的平均速度V。V2,V3,hellip;,V7被用来近似表示左前方车辆的速度,左后车,前车,后车,右前面的车辆,和右后方的车辆,目标车辆与相邻车辆的相对速度可以根据目标车辆的平均速度估计。
(2)以目标车辆最近的试验车为标准,假设道路上的各类车辆在每条车道上均服从均匀分布,并根据道路上不同类型车辆的比例估计相邻车辆的类型。
(3)考虑不同车辆的类型、位置、速度和目标车辆周边车辆驾驶员的目标倾向,当目标车辆到达vtl2时;每个车道上的车辆可以获得目标的力量,在路的尽头处分析收集汽车群的情况。
三.方法论
Hidden Markov模型(HMM)是一个由马尔可夫链和一般随机过程组成的时间序列统计分析模型。我们用马尔可夫链描述驾驶员车辆特征的演变,用一般随机过程描述车辆群状况下观测值的统计特征。
在文中,我们以三车道场景为例,阐述了车辆群态势的重建方法。由于交通信号控制,交叉口的车辆行驶特性不同于道路上的车辆行驶特性。而车辆在不同区域行驶时,车辆群状况的变化规律必然不同。为此,在大量观测资料的基础上,我们将城市道路网划分为不同的区域并分别研究了不同地区机动车群的变化规律,最终揭示了整个路网的变迁规律。
在图4中,在不影响交通信号的情况下,我们在交叉路口的普通公路路段设置了1号线,在加宽段入口处设置2号线,在交叉口上游加宽段出口设置3号分界线。分界线4设置在停车线的位置,在交叉口下游加宽段出口处设置5, 8、11号分隔线。分割线6, 9和12分别安装在普通路段下游交叉口。分割线7和10分别安装在人行横道的路口下游,虚拟跳闸线分别设置在5, 6, 8、9, 11分界线上。而12号线由vtl1,vtl2,vtl3,vtl4,vtl5,和vtl6分别代表。
3.1路段车辆群态势的重建方法。我们以vtl1之间路段(分5行)和vtl2(分6行)为例,说明汽车集团情况重建的步骤:(1)实验车辆分割线5和6之间的旅行时间是车辆根据到达vtl1和vtl2的时间来估计确定的。然后汽车集团情况在目标车辆位于分界线6时确认其伽玛分布。(2)假设过渡车群状况和驾驶员的车辆特征有马尔可夫物业并由相应的驱动车辆特征影响时间的汽车集团的情况。在事实上,车辆的类型没有改变驾驶时情况,只有驾驶倾向发生了变化;因此,司机驾驶车辆特征转变为代表这里的前进倾向。驾驶车辆特征的车辆组的情况在不同时期的影响是显示在图5中。
本文利用Hidden Markov模型揭示了车辆群态势随驾驶员车辆特征时变特性的变化机理。HMM由表示。
3.2。直行车辆群态势的重建方法。直线5和4之间直线行驶的车道数是恒定的,右转和左转车辆都有专用车道,因此右转和左转车辆对直行车辆的影响可以忽略。因此,分界线6和5之间的车辆群情况的转移矩阵构造方法也适用于分界线5和4之间的区段。同样,可以在4号线和3号线、3号线和2号线之间的区域内对直行车辆的车辆群情况进行重建,如图6所示,在交叉路口直通车辆群的重建过程。
3.3。右转、左转车辆群态势的重建方法。右转和左转车辆交叉路口有专用车道,为了便于研究,忽略了其他方向行驶车辆对右转和左转车辆的影响。右转和左转车辆对车辆直行的影响被忽略。左转弯车辆之间的分界线7、4、3、3和2,从右转弯的影响,直行车辆都被忽视,它只能运行在专用车道的车辆。同样,右转弯车辆的分割线10和4,4和3之间的汽车集团的情况。以左转车辆车辆群状况的重建为例,说明了车辆群情况的构造过程,如图7所示。
3.4。城市道路网车辆群态势重构方法。三车道路网由多个区域组成,其中一个区域如图3所示(除第2行和第1行之间的区域除外)。根据各区域的车辆群态势信息,可重构整个路网的车辆群状况。城市道路网车辆群状况的逆向重建过程如图8所示。
4 实验设计
4.1实验设备。汽车行驶中的实验数据获得在城市道路环境中通过动态驱动车辆环境信息采集系统(包括生物治理3便携式生理信号测量仪器和sg299-gps非接触式多功能表,如图9所示)。此外,许多类型的软件进行试验,如psylab软件,SPSS 19和会声会影10。
4.2实验内容
- 共50司机参与了我们组织的心理问卷测试,通过这种测试方法我们可以得到50名司机的驾驶倾向数据。
- 我们在在实际驾驶试验中收集了车辆群体状况(车辆类型、位置等)影响因素的时间序列数据。
- 实验条件:实验在正常工作日上午8:30至10:30进行,天气和路况良好,交通状况为非自由流。
4.3 试验地点和路况。选择了图10所示的三条实验路线进行实验。实验路线包括华光路南京路联通路重庆路(标记为黄色线)、华光路南京路人民西路重庆路(标记为蓝色线),和华光路世纪路人民西路重庆路(标记为红色路线)。50名驾驶员组织驾驶实验车,在实验循环上设置动态信息采集系统,驾驶员可以根据自己的习惯和喜好自由变换车道。从每个司机身上收集多组实验数据。不同的司机到达时间信息记录在车辆到达VTL(绿色标记线)时。我们采用高清晰摄像机、激光测距等方法记录目标车辆、环境(内外)和驾驶员行为等信息,为进一步研究提供依据。
5.结果和讨论
5.1我们研究了不同侵彻率下车辆群的构造情况。在仅限于空间的情况时,我们团队以20%的渗透率为例进行了重建,从所有数据中选取了30名驾驶员的部分实验数据作为样本数据。根据所提出的方法我们可以得到车辆组的转移概率矩阵,并由此对实验区的车辆群状况进行了重建。
对于同一类型的车辆,当驾驶员有不同倾向驾驶同一车型时,车辆组情况的转移矩阵不同。同样地,同样的倾向,当驾驶者具有相同的倾向驾驶不同类型的车辆,过渡矩阵的车辆集团的情况是不同的。因此,驾驶员车辆特征演变对车辆群态势的影响是复杂多样的。由于车辆类型没有改变,所以驾驶时,当驾驶员的驾驶倾向发生了变化,驾驶员的车辆特征跃迁就代表了一条轨迹数据驱动倾向的演变。我们以“小型车 普通型”到“小型车 激进型”为例的过渡,并在一些地区的汽车集团情况的过渡矩阵如下,其中P(1le;mle;12,1le;nle;12)为代表的汽车集团情况之间的过渡矩阵的分界线:
同样,对于中型车辆和大型车辆,也可以根据所提出的方法得到某些地区的车辆组情况的转移矩阵。由于空间有限,这些具体的分析不再在这里演示。通过对汽车集团的情况是由目标车辆及周边车辆当目标车辆到达vtl2,vtl4,和vtl6鉴定,在道路网的车辆组的情况会根据每个地区的相应的过渡矩阵重构。
5.2讨论
5.2.1。实际驾驶验证。选取了20个未用于模型标定的驾驶员的部分实验数据,验证了模型的正确性。我们接着选取50组数据进行车辆群态势重构。换言之,每个驾驶员的车辆群状况的50次转变被重建。将重建结果与车辆组实际情况进行比较。我们选取了20%的穿透率计算来说明计算方法的重建精度,得到的实际行车试验结果均显示在表1。可以从表1得知,平均准确率为79.6%,普及率为20%,平均准确率(简称准确率以下)是用来评估的准确性。此外,我们计算了穿透率为20%、25%、30%、35%和40%的准确率,不同渗透率的准确率见图11。
从图11可以看出,当渗透率为20%时,模型的准确率约为80%。随着渗透率的增加,准确率不断提高。当钻速从20%增加到30%时,重建准确
全文共6406字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9800],资料为PDF文档或Word文档,PDF文档可免费转换为Word

