英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
BIM教育整合—以建筑技术项目Bolt Tower Dolni Vitkovice为例
摘 要
建筑信息模型( BIM )可以在AEC行业的许多工作中产生巨大的功效,即使在处理建筑技术项目时也是如此。本文提出了一种如何在高等教育中,特别是在毕业论文管理及其监督工作中使用建筑信息模型的方法。在建筑专业中,毕业设计大多是以项目为基础,以选定的建筑为目标编制一个建筑技术项目。本文说明了如何使用输入数据,并与标准输入数据(如印刷设计文档)进行比较。结论中说明了建筑信息模型作为建筑技术项目输入数据的有效性,并且说明了BIM在灯光照明领域的作用
关键词:建筑信息模型、BIM、教学、建筑管理、钢结构、灯光照明
1.介绍
毫无疑问,建筑信息模型( BIM )是AEC行业公认的发展趋势,它影响到投资者、开发商、建筑师、设计师、承包商、项目经理,也影响到高等学府的导师和教育部门。在BIM方法被应用于很多国家的建筑行业和标准且产生巨大影响的背景下,BIM教学也成为了人们津津乐道的一个话题。也许是因为每个国家的建筑行业发展程度不同,也许是因为不仅仅是各个国家,甚至每个教育机构的教学方法和做法都不同。对于“如何教授BIM”的问题,有各种各样不同的方法组合。本文介绍了如何通过毕业论文工作来领导硕士研究生学习BIM。
BIM在建筑、工程和建筑(AEC)行业得到广泛认可并产生越来越多的研究.BIM可以定义为“一个共享的知识资源,是一个分享有关这个设施的信息,为该设施从概念到拆除的全生命周期中的所有决策提供可靠依据的过程”.它代表了建筑物的数字模型,作为一个集成和协调的数据库,可以共享和传输有关整个建筑的信息.BIM工具主要用于分析多种性能标准,包括照明作为主要问题。通常,BIM软件用于实施照明条件分析,区分自然和人工照明。然而,主要障碍是缺乏准确的信息.
虽然许多作者已经深入研究了与BIM相关的建筑照明,计算机视觉的整合相对较新计算机视觉是一种获取和评估数字图像以获取某种类型信息的技术,可以广泛应用。此外,计算机视觉有助于缩短检查过程的耗时。计算机视觉系统(CVS)已经取得了巨大的进展,并且目前除了基于边缘的图像算法之外人们还关注于深度数据。在许多情况下,基于边缘的图像算法仍然可以为对象检测和定位提供更好的结果。用于物体检测,定位和3D姿态估计的方法已在前一篇文章中进行了全面解释,将它们分类为基于图像的技术和基于模型的技术适用于无纹理对象检测。匹配是数字图像分析中的一个关键问题,边缘可能是最重要的低级图像特征.倒角匹配算法是基于形状的物体检测的高性能解决方案,它可以计算边缘之间的距离,倒角距离变换已经有效地用于基于模型的边缘匹配方法,深入收集和解释了最先进和不同的倒角距离变换算法.本工作中提出的新程序在不同方面优于其他方法。新程序是我们以前工作的改进版本,它增强了候选和模型选择,同时利用快速方向倒角匹配(FDCM)和直接定向倒角优化(D2CO)的姿态细化和评分。
图像配准是将不同时间,不同视角和不同传感器重叠同一场景的两个或多个图像的匹配过程。通常,遥感、医学、制图和计算机视觉需要图像配准。一些作者已将其应用于检测照明和灯具。Elvidge等人研究了用于识别光照类型的最佳光谱带,并估计了用于测量光照效率的四个主要指标,这导致具有最小光谱重叠的良好结果。Liu等人提出了一种基于成像传感器的发光二极管(LED)照明系统,该系统实现了对环境照明的更精细感知,从而实现更精确的照明控制。Ng等人提出了一种综合方法,结合CVS和实时管理系统(RTMS)来解决照明产品制造中的质量控制问题。
这项工作提出了一种基于计算机视觉的完整和新颖的方法以检测、识别和定位所有类型的灯,而不受其光表面形状的影响。我们描述了使用计算机视觉和成像处理工具增强文献中当前方法的新算法的设计和开发。适用于任何类型的灯形状的整个系统的结果被集成到BIM中,目的是解决与耗时操作和人为错误相关的问题。这项工作的主要贡献在于形状和姿势估计技术的普遍化,以允许识别更广泛的灯形状以及定位系统和BIM集成步骤的改进。这项工作以快速实用的方式应用了一项新技术,从而创新了建筑照明。然而,考虑到该方法的横截面特性,应用可以扩展到其他扇区。此外,该方法可广泛应用于灯具的连续自动扫描、灯具状态的精确了解、灯具的建立、电气设备的维护、能源审计以及居住者适应性室内条件的设定。
-
- BIM与教学
其他学者在BIM教学方面提出了许多研究、评论和调查。一些论文致力于一般的BIM教学,其中教授和讲师的BIM能力被用于BIM教学评估,并将概念和学科知识应用于教学。一些论文更侧重于建筑管理,2016年,BIM导向这门学科被正式纳入课程。本课题的研究目标是学习从模型、4D和5D建模中提取数据,并将其应用于建筑公司的项目管理中。我从另一篇论文得出了一个结论,基于BIM的综合教育平台可以帮助学生形成和加深对项目生命周期的理解,并能够根据现实世界的项目和商业情况提供大量的教学材料。施工技术经理和施工技术专业的学生工作的重点是利用或检验基于BIM方法的成本估算。不幸的是,关于BIM在建筑成本估算中的有效性的数据仍然很少。
1.2 输入数据
在施工过程的设计施工技术确定时,建议收集尽可能多的输入数据。在传统项目步骤上,这想工作就是收集招标文件、工程量清单、成本估算和合同。这些文档可以通过应刷版或电子版本实现,也可以编辑或不编辑。
1.3方法
布尔诺理工大学的技术、机械化和建筑管理学院通过了名为“建筑技术”的全日制硕士课程。去年的学生准备了一个建筑技术项目作为毕业论文。项目基于从实践中获得的真实数据(通常是可以建筑但尚未建成的真实项目文件)。
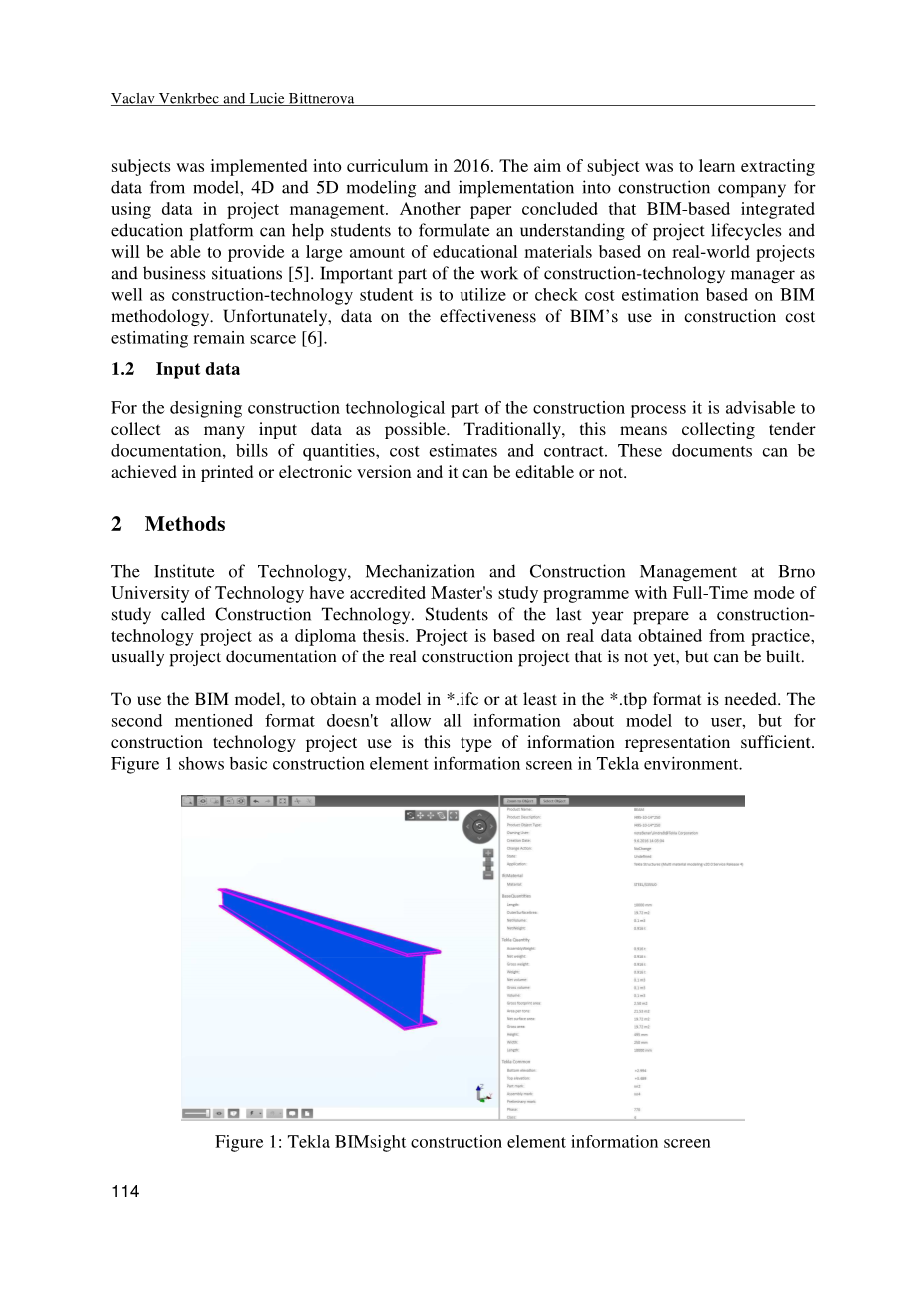
要使用BIM模型,需要获得*.ifc或*.tbp格式的模型。第二种提到的格式不允许用户获得关于模型的所有信息,但是对于建筑技术项目来说,这种类型的信息足够了。图1显示了Tekla环境中的基本构造元素信息屏幕。
图1:Tekla BIMsight建筑元素信息屏幕
我建议将模型分解成几个部分,以便将对象模型划分为单独的技术阶段。Tekla BIMsight查看器允许按类别显示和隐藏单个结构元素。这个工具可以帮助建筑技术工程师按照传统的技术流程分解成明确定义的单元,如上部结构、承重结构、非承重结构等。
2.结果-案例研究
在这个案例研究中,展示了硕士研究生Lucie Bittnerova毕业论文的一些部分。
2.1.BIM集成中的表面投影
建筑物的BIM模型代表了可用于提高检测准确性的额外信息源。除了插入[数据]中举例说明的新数据,我们还可以使用BIM模型中的几何信息来提取具有空间信息的曲面列表,并使用它们来调整检测的位置。假设gbXML - 为了便于将存储在BIM中的建筑数据转移到工程分析工具而创建的开放模式 - 作为BIM信息的支持格式,我们可以通过访问具有路径“gbXML / Campus / Surface / PlanarGeometry”的元素来获取所需数据“在XML树中。
鉴于检测到的灯嵌入建筑物的天花板中,我们可以在每个检测的3D空间中执行投影到最近的建筑物表面。设S = {si}为建筑物模型的表面集合,每个表面具有单位法向量nk 和点xk
包含在由表面定义的平面中。然后,模型中最接近点p的表面由下式给出
K = arg min dk= arg min | nk ·(p - xk)|。
k k
然后,位于p的检测的投影位置pi与最近的模型表面sk 在距离dk 和单位法向量nk处,是
pi= p-dknk。
通过这种方法,我们可以改进检测的位置,同时根据最近的表面将检测分配给建筑模型中的相应空间。与在中使用的多面体点测试相比,这是一种更有效,更简单的方法。
实验系统的描述
实验数据的获取发生在西班牙维哥大学采矿与能源工程学院的两个地方。数字2显示该建筑物的BIM模型的几何形状。用于我们测试的两个位置如图所示3.第一个是带有矩形灯的教室区走廊,第二个是带圆形灯的大厅。两种灯都嵌入天花板中。
图2. SketchUp中维哥大学采矿与能源工程学院BIM模型的几何图形。
(a) (b)
图3.实验中使用的空间:(a)教室走廊,矩形灯(模型4);及(b)大厅,圆形灯(型号5)。
我们使用高精度传感器提取的点云作为我们实验灯位置的基础事实。这些云如图所示4.图中的云4a是使用基于背负的检测系统获得的,该检测系统基于LiDAR传感器和惯性测量单元(IMU),其数据采用同步定位和映射(SLAM)技术进行处理.第二个云,如图4b,用来自FARO Technologies Inc.(Lake Mary,FL,USA)的FARO Focus3D X 330激光扫描仪捕获。表2列出了两种系统的技术特性1.
(a) (b)
图4.两个空间的点云用作实验结果的基本事实:
教室走廊,矩形灯(型号4),用背包系统提取;(b)用FARO Focus3D X 330提取的大厅,圆形灯(型号5)。
表1.用于提取点云的两个系统的技术特征。
|
背包系统 |
FARO Focus3D X 330 |
|
|
最大。范围 |
100 m |
330 m |
|
测量率 |
300,000点/秒 |
122,000-976,000点/秒 |
|
步长(垂直/水平) |
2.0◦/0.1–0.4◦ |
0.009◦/0.009◦ |
|
视场(垂直/水平) |
30◦/360◦ |
300◦/360◦ |
|
测距错误 |
3厘米 |
2毫米 |
我们使用带有Google Tango的Lenovo Phab 2 Pro获得了两个地方的灰度图像和位置数据.图像以大约30帧/秒的速率提取,原始分辨率为1920times;1080,但之后缩小为960times;540。
处理以提高方法的速度。位置数据是从信息中获得的
由IMU提供的设备结合环境的视觉特征,使用先进的计算机视觉和图像处理技术来提高运动跟踪信息的准确性.表格中显示了完整的图像数据集和实验中使用的两个位置的一些统计数据2.收购过程,如图所示5,完成了
步行速度约为1米/秒,将相机定位在离地面1.5米处,相对于水平面的间距为asymp;60◦。
表2.数据集的统计数据和用于实验的空间。
|
长方形 |
圆 |
总 |
|
|
号码图片 |
lt;
剩余内容已隐藏,支付完成后下载完整资料 资料编号:[445333],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

