英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
建立压缩天然气发动机电控喷射系统精确的动态模型
摘要
压缩天然气发动机为减少污染气体以及颗粒的排放提供了一个非标准的解决方案,然而,天然气的可压缩性和非线性流体动力学的复杂性使得计量空气—燃气组成的混合气变得非常困难。为了解决这一问题和研究出有效的共轨压力控制策略,有必要开发出一个精确的控制导向的模型,这个模型涉及到相关的组件,控制过程和动态变化。这篇文章表明了以模型为基础的方法可以被用于性能的预测和分析以及控制系统的设计。所开发的模型的验证是通过仿真结果和真实喷射系统的试验数据的比较来进行的。
关键词:燃料喷射模型 压缩天然气 共轨喷射系统 喷射压力控制 动态建模
1 引言
汽车发动机通过使用压缩天然气作为燃料可以减少有害排放物的影响,适应越来越严格的排放法规。虽然可以有效地减少柴油发动机在燃烧过程有害气体和和颗粒的排放,之所以使用压缩天然气作为发动机的代用燃料是因为分散在各地的与天然气相关基础设施,使得天然气具有广泛的可用性和简单的传送方式。(International Gas Union,2005;Geok et al.2009)。进一步说,减少燃料消耗的责任是由汽车制造商和使用者共同承担的。与此同时,某些发动机的性能水平必须被维持或者提升。以上所说的目标可以通过精确计量空气—燃料混合气来实现,这种方法在共轨喷射系统中可以被包含在两种方式里面。一种方式是精确控制喷油器开启和关闭之间的时间间隔。另一种方式是喷射压力,即使,由于天然气的可压缩性,找到一个精确而有效的控制规律是非常困难的。也就是说,转速的变化,负载的变化和功率需求的变化会决定喷射系统工作点发生大量且频繁的变化,而喷射系统的这些变化必要的对于要喷射适当的燃料量。而且,参数的变化影响着系统的性能以及扰动一定要被补偿。
本文的目的是通过先进的方案和以模型为基础的设计方法来提高控制器的鲁棒性和性能,也就是说,建立压缩天然气喷射系统的精确模型对于系统中执行机构的分析、预测和设计能够很好地控制轨压的控制器同样是有用的。这个模型对于控制的设计应该足够的简单。然而,即使在柴油机和汽油机的喷射系统上已经开发出很多控制导向的模型,和少量的压缩天然气喷射系统(Lino et al.2008; Lino and Maione.2013;ab.2014)。然而,现今存在的能够重复真实喷射系统动作的精确的模型并不满足以模型为基础的控制系统的设计的要求。这些模型有助于进一步了解喷射过程、评估和验证工作条件对喷射系统的影响、探索不同的配置和可供选择功能性设计(see Lino and Maione (2007); Dellino et al. (2009);Misul et al. (2014); Baratta et al. (2015), and references therein)。
所做研究的目的是建立一个压缩天然气电控喷射系统的精确模型,对于控制系统的开发是在精确性、简单性和适用性三者之间进行权衡比较。这种方法是以喷射过程中涉及到的物理方程式为基础,需要调整最小的一组参数。最开始的点是一个简单二阶非线性模型,这个模型中包含了许多假设。然后,为了提高预测的精确性,一个更高阶的包括电磁力的非线性模型被建立,机械元素的运动就会使得运动部件具有惯性、功率的损失、比例延时和体积的改变。
本文由以下几部分组成:第二部分陈述了压缩天然气喷射系统、第三部分描述了建模的方法、第四部分记录了验证分析的方法,这种方法是通过仿真数据和真实实验数据的比较来评估模型的可靠性、实时性和频率响应。最后,第五部分陈述了结论。
2 甲烷喷射系统
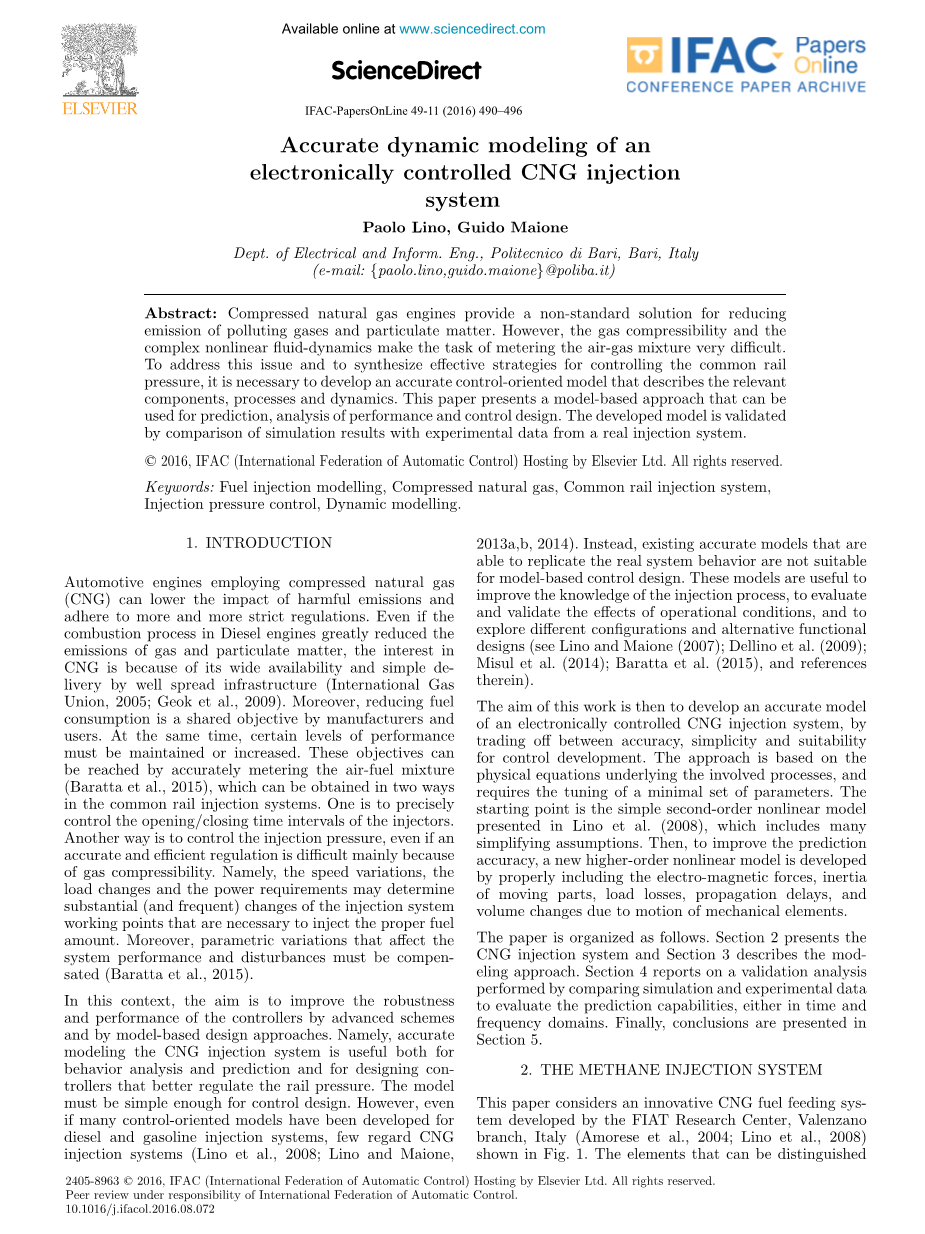
本文分析由FIAT研发中心开发的新型压缩天然气燃料供给系统(Amorese et al., 2004; Lino et al., 2008),如图1所示,在系统中的组件分别有:一个储气罐、一个用于降低压力的机械元件(减压阀)、一个电磁阀、用于组成共轨的计量系统和一组四个的电子喷射器。一个电控单元(ECU)处理传感器的信息和对系统中的阀门和喷射器的发出动作指令。天然气经过一个减压装置减压后从储气罐流向轨,通过喷射器的计量从而在进气管中获得合适的混合气。
图1 CNG喷射系统结构组成
特别地,储气罐中气体的压力高达200bar,然后把气体压力输送到一个减压装置减压到5至20bar。为了达到减压的目的,减压装置的腔室是被分割成上下两个腔室,上面的那个体积是可以控制的,气体通过电磁阀的调整来到达上面的室,气体通过一个小孔来到达下面的主室,这个孔通过一根管与储气罐连接在一起。进入控制室的流量改变活塞上下移动的活塞上的气体压力,并且移动主室中的闸门,闸门的流入根据该闸门的位置而改变。 换句话说,打开阀增加了控制室中的压力,推动活塞向下并打开下方的快门,使得更多的燃料进入主室并增加轨道压力。 相反,关闭阀将消除向上移动的活塞上的压力:在这种情况下,快门由预加载的弹簧关闭,并且压力降低。 总而言之,在一侧,ECU能够通过适当地驱动电液阀来调节轨道压力。 另一方面,ECU基于所需的速度和施加的负载来驱动喷射器。 由于喷射流量取决于轨道压力并且喷射持续时间取决于喷射器打开时间间隔,因此两者的同时控制允许所喷射的燃料的精确计量。
3 数学模型
为了开发一个作为有效预测器的模型,重要的是选择影响轨道压力的物理变量和重要现象。喷射系统由燃料流动的控制体积的互连表示,并且其特征在于均匀的,随时间变化的压力分布。这些子系统中的压力是不同的,并且根据不同的动力学而改变。一旦确定了主独立动力学并为每个独立动力学定义了状态变量,则通过应用基本定律(理想气体定律,连续性定律,动量方程,牛顿第二律等)来推导状态空间模型。在所有考虑的体积中假设相同的温度,因为它是缓慢变化和几乎恒定的,因为它可以通过实验验证。由于罐压力在大的时间间隔内几乎是恒定的,并且在注入过程期间不显着变化,因此它被认为是输入。然后状态变量是:控制室,主室,共轨和管道中的压力,移动部件的位置和速度,以及电动阀的磁通量。主输出为轨压,其值用于反馈控制。
3.1 减压装置
喷射系统的模型是通过结合连续性流动方程和理想气体方程建立的(Zucrow and Hoffman, 1976)。特别地,理想气体方程是:,控制容积内气体压力,是气体的密度,T是气体的温度,R是气体常数。因此,根据理想气体方程的时间导数和质量守恒定律得到了下面的公式:
(1)
在式中:和分别是流进和流出气体的质量,流经小孔和流过减压装置时的气体流动可以看作是等熵过程,因此可以通过动量方程描述(Zucrow and
Hoffman, 1976):
(2)
在式中:A是最小的流通截面积,与气流方形垂直;是气体流经最小截面之前的密度;是逆流压力和顺流压力的比值;是流量系数,这个系数考虑到了由于流体摩擦引起的数量损失和动能损失。压比函数是通过帕累托法则来表示的(McCloy and Martin, 1980)。此外,给出比热容,当减小时,是一个递增的非线性函数,对于时,流动看成是亚音速流动:
(3)
如果压比小于判定值(不满足上面给出的判定条件),也就是,流动看作是音速流动:
(4)
可以为每个控制体积适当地指定先前的方程。 注意,注入系统内的温度几乎是恒定的,因此可以假设为理想气体。 事实上,等熵热值几乎恒定,等于特定热比的倒数(McCloy和Martin,1980)。 根据这一假设,(1)—(4)给出了气体运动的近似方程,而没有必要使模型复杂化。
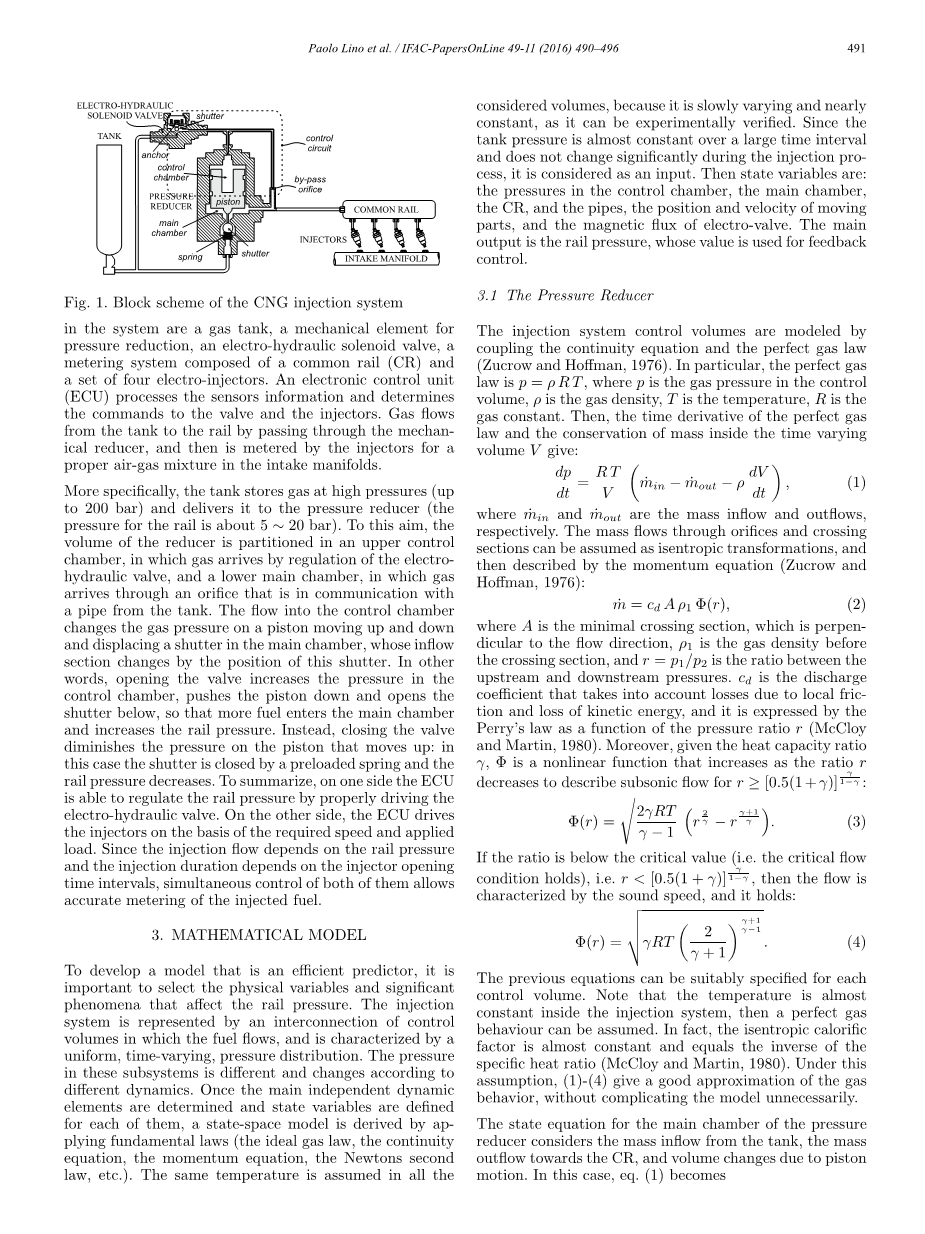
图2 (a)主室入口段计算示意图 (b)活塞/阀门联轴器的自由体图
减压器的主室的状态方程考虑来自储气罐的质量流入,朝向共轨的质量流出,以及由于活塞运动的而引起的体积变化。在这种情况下,(1)变为:
(5)
在式中:分别是天然气在减压器主室时的压力、体积和密度,是储气罐和减压器主室之间的质量流量,是主室和轨之间的质量流量。第五个方程第二项中的每个项定义如下:
由于减压器主室和轨两者的气体压力比值永远超过判定值,因此流速方程可以被估算为:
(6)
在式中:是轨中气体压力,和分别是连接管末端的气体密度和压力。是恒定的出口截面积,是相对应的流量系数。
系统正常工作时,天然气储气罐的压力超过50bar,而控制容积压力低于20bar,因此判定条件在这些容器间的流动中总是保持不变的。此时,方程式(2)和(4)可以被估算为:
(7)
在式中:是储气罐中气体密度,是可变的进口截面积,是相应的流量系数。最小流动截面取决于球形阀门在锥形座上的位置,并且由截头圆锥的侧表面确定。由于阀门和活塞通过圆柱形锚固件联接,所以它们的瞬时垂直位移是相等的。如图2(a)所示,如果是圆锥座的斜率,是阀门直径,是圆锥体斜率的高度,是最大的直径,是最小的直径,因此可以得到截面积计算公式:
(8)
为了估算,活塞和阀门的动态变化是通过牛顿第二定律描述的。事实上,阀门的移动取决于气体的压力、弹力、阻力和由活塞通过锚固件施加的力。压力和分别取决于储气罐气体压强和 主室中气体压强,弹力由用于关闭阀门的弹簧预紧力产生。阻力由流体对运动件的摩擦产生。活塞的移动分别取决于(这两个力分别由主室压强和控制体积压强提供),阻力和库伦摩擦力,关于阀门和活塞的受力平衡分析如图2(b),公式如下:
(9)
在式中:分别是活塞和阀门的质量,作用在阀门上的力通过假设从pt到pm的转变发生在最小流动截面处,并且考虑到压力垂直于球形表面。因此,分别施加在下和上球形盖部分和上的压力pt和pm都作用在直径为的等效圆形表面上(Streeter,1988)。 然后作用在阀门上的每个力项由下式表示:
(10)
在式中:分别是阀门关闭时弹簧的弹劲系数和预紧力。斯托克法则表明层流中的拉力取决于绝对液体的绝对粘度和相对速度。
作用于活塞上各项力表达式如下:
(11)
在式中:分别是活塞的底表面和顶表面,压强均是垂直于活塞表面,如果两者都在正交平面上运动,那么它们是作用于活塞的投影面积。拉力取决于活塞的拉力系数,此系数与缸体的形状、表面积和活塞的速度有关,活塞的速度是被假设与阀门的速度相同,燃料的密度取决于流体运动方向(Streeter ,1988)。
最后,主室在(5)式中的体积变化率如下式:
(12)
在式中:是方程式(9)的积分。
3.2 控制回路
控制回路中包括了控制室和电磁阀,方程式(1)对回路描述为:来自储气罐的质量流入,流向共轨的质量流出,活塞运动引起的体积变化:
(13)
在式中:分别是回路中气体的体积和密度,是储气罐与回路间的质量流量,是回路与轨之间的质量流量。每个项的计算如下进行。
流经控制回路和共轨之间的旁路孔的流体近似静止,则由(Zucrow和Hoffman,1976)确定:
(14)
在式中:是连接控制回路和共轨的管道的末端的燃料压力,是共轨内燃料密度,考虑了旁通孔最小截面中的动能损失。
来自储气罐的质量流入通过电磁阀的动作来调节,该电磁阀包括在锥形座上的电压控制的电磁体和球形挡板。阀驱动信号允许控制进入流量。控制回路和油箱两者的比值总是低于临界值,因此质量流量由(2)和(4)定义:
(15)
因为阀门/阀座的几何结构类似于图2(a)所展示的结构,有着相似的尺寸,最小流入段是由阀门的轴向位移确定的截头圆锥的侧表面:
(16)
在式中:是锥形座的斜度,是阀门的直径。
阀门的轴向位移取决于电磁力、压力、由压强共同产生的力、弹簧预紧力产生的弹力和拉力:
(17)
在式中:是阀门的质量,每个力的表达式如下:
(18)
在式中:是弹簧弹性常数,是阀门关闭时的弹簧弹力,拉力与速度、粘度有关。此外,假定从pt到pc的压力梯度完全施加在入口最小截面上,施加到下
全文共11664字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144953],资料为PDF文档或Word文档,PDF文档可免费转换为Word

