不同粘度液体在水力旋流器内运动的正电子发射粒子追踪与CFD研究
Alex C. Hoffmann *, Aring;shild Skorpen, Yu-Fen Chang
摘要:旋风分离器广泛用于从气体或液体中分离固体或液滴。它们代表了一种简易而强大的分离技术,具有低成本和维护费用的特性。因此,将旋风分离器技术扩展到新的应用领域令人关注,特别是在石油和天然气行业,这里的分离任务变得更加苛刻和多样化,此外分离过程正在运用到更偏远的装置上,如海底或井下装置。本文旨在利用最先进的实验分析技术,即正电子发射粒子跟踪(PEPT)和计算流体动力学(CFD),通过对湍流效应的大涡模拟,阐明包括作用于高粘度液体的旋流器的工作原理。结果表明,液体和颗粒流动具有许多有趣和反常的特征,如颗粒意外地向内涡流偏移,以及涡流端对颗粒流动的影响。同时发现利用极小化技术可以非常精确地确定水力旋流器的轴线,从而将笛卡尔坐标下的跟踪算法的输出转换为以旋流器为轴线的柱坐标。这对结果产生额外的影响。在三维笛卡尔坐标系和二维圆柱坐标系中都显示了不同粒子的轨迹,其中一些最终被捕获,而另一些则被丢失,并讨论了流体和粒子特性的影响。
1.引言
分离和提纯在处理复杂的多相流的预处理工业中越来越重要。例如,石油和天然气开采量的增加意味着油井的生产时间比最初预期的要长得多。因此,处理加工装置的设计需要满足分离和净化任务,而这些任务越来越多样化、复杂和繁重。
旋风分离器没有活动部件,而由外部泵驱动。它们价格便宜,用途广泛,结构紧凑,只需要很少的维护。这使得旋风分离器比洗涤器、过滤器和沉降器更具优势。旋风分离器可以将固体颗粒或液滴从气体流或将固体颗粒从液体流中分离出来;在后一种情况下,它们通常被称为“水力旋流器”,这反映了目前被净化的液体通常是水的事实。
聚焦于液体、沙子和其他固体颗粒中的固体颗粒可能会导致加工设备出现各种问题,例如腐蚀、泵和阀门堵塞、容器内固体堆积或对测量仪器的干扰;某些类型的固体也可能无法进入排出流中。
本文所描述的工作旨在研究水力旋流器用于除水以外的液体(高粘度的特殊液体)项目的延续。不管怎样,这些结果提高了人们对水力旋流器工作的认识。
2.背景与文献综述
2.1水力旋流器
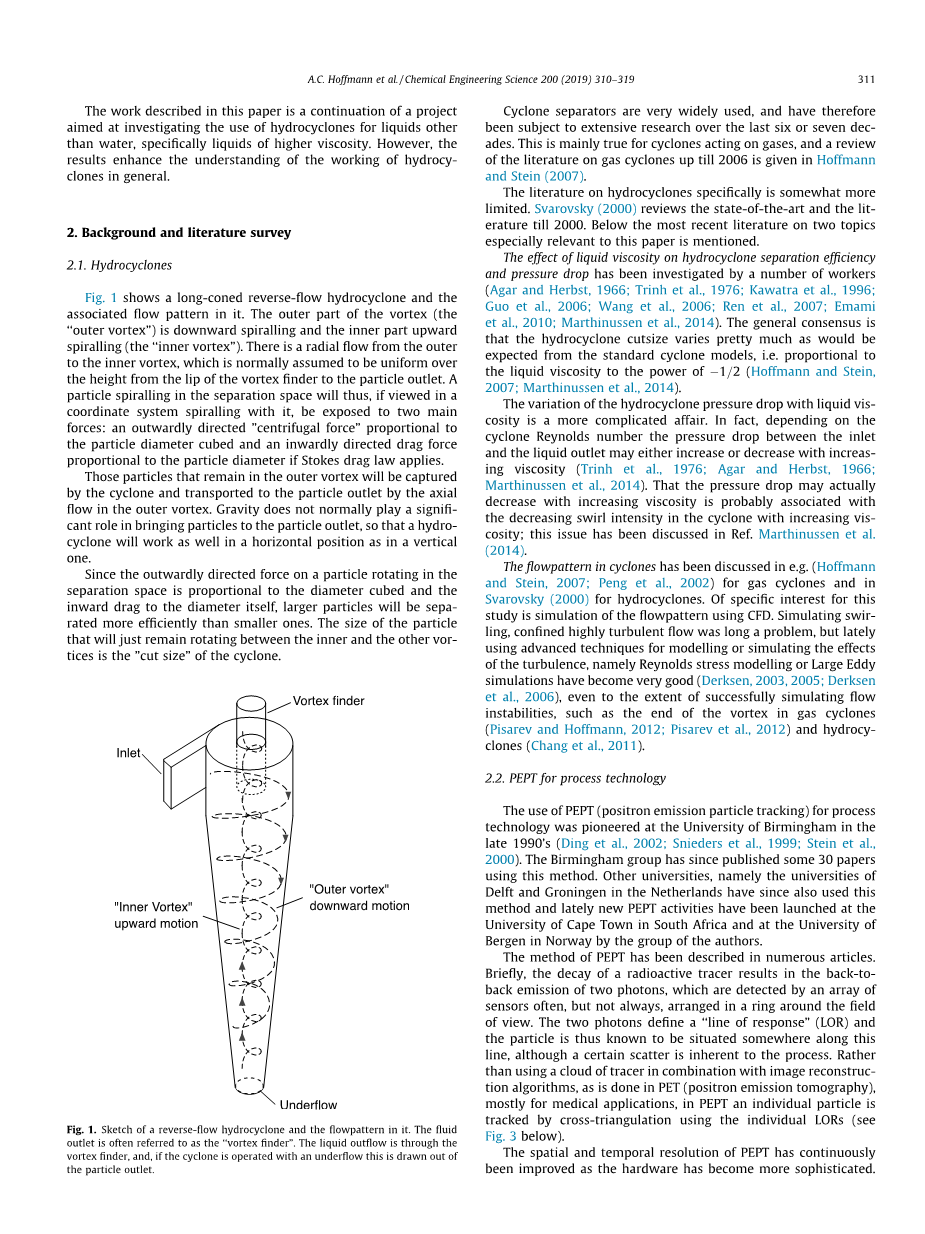
图1显示了一个长锥形逆流水力旋流器及其内部的流动模式。漩涡的外部流场(“外漩涡”)是向下螺旋,内部流场是向上螺旋(“内漩涡”)。从外涡到内涡存在径向流动,一般认为径向流动在溢流管边缘到粒子出口的高度上是均匀的。因此,如果在与其一起螺旋运动的坐标系中观察,在分离空间中螺旋运动的粒子将受到两个主要的力:与粒子直径的立方成正比的向外指向的“离心力”和应用斯托克斯阻力定律得到的与粒子直径成正比的向内指向的拖曳力。
留在外涡内的颗粒会被旋流器捕获,并由外涡内的轴向流输送到颗粒出口。重力通常不会在将颗粒带到颗粒出口这一过程中起重要的作用,因此水力旋流器在水平位置和垂直位置上都能工作得很好。
由于在分离空间中旋转的粒子受到的向外定向力与直径的立方成正比,且向内的阻力与直径本身成正比,因此较大的粒子将比较小的粒子更有效地分离。在内涡和其他漩涡之间保持旋转的颗粒的尺寸就是分离器的“分割尺寸”。
图1,逆流水力旋流器及其流型示意图。流体出口通常被称为“溢流管口”。液体流出是通过溢流口,如果旋流器作用在低流量操作下,则从颗粒出口抽出。
旋风分离器的应用非常广泛,因此在过去的六七十年中受到了广泛的研究。这主要适用于作用于气体的旋风分离器,Hoffmann和Stein(2007)对2006年之前的旋风分离器文献进行了综述。
有关水力旋流器的文献特别有限。Svarovsky(2000)回顾了2000年前的最新技术和文献。以下是与本文特别相关的两个主题的最新文献。
许多专家研究了液体粘度对水力旋流器分离效率和压降的影响(Agar和Herbst,1966;Trinh等,1976;Kawatra等,1996;Guo等,2006;Wang等人,2006;Ren等,2007;Emami等,2010;Marthinussen等,2014)。普遍的共识是,水力旋流器的分割尺寸与标准旋风器模型的预期值相差很大,即液体粘度与功率的-1/2成正比的(霍夫曼和斯坦,2007;Marthinussen等,2014)。
水力旋流器压力降随液体粘度的变化是一个比较复杂的问题。事实上,根据旋风分离器的雷诺数,入口和液体出口之间的压力降可能随着粘度的增加而增加或减少(Trinh等人,1976;Agar和Herbst,1966;Marthinussen等人,2014)。随着粘度的增加,压力降实际上可能会降低,这可能与随着粘度的增加,旋风分离器中涡流强度的降低有关; Marthinussen等人(2014年)研究了这一问题。
(Hoffmann和Stein,2007;Peng等人,2002)讨论了旋风分离器的流型,而Svarovsky(2000)讨论了水力旋流器的流型。本研究特别关注的是使用CFD模拟气流模式。模拟涡流、高湍流是一个长期存在的难题,但最近使用先进的技术来建模或模拟湍流的影响,即雷诺应力建模或大涡模拟已经做得非常好(Derksen,2003、2005;Derksen等人,2006),甚至成功地模拟了气流的不稳定性,如旋风分离器(Pisarev and Hoffmann,2012; Pisarev等人,2012)和水力旋流器(Chang等人,2011)旋涡的末端。
2.2正电子发射粒子跟踪技术
在20世纪90年代末,伯明翰大学率先采用了PEPT(正电子发射粒子跟踪)技术(Ding等人,2002年;Snieders等人,1999年;Stein等人,2000年)。伯明翰研究小组已经用这种方法发表了大约30篇论文。其他大学,即荷兰的代尔夫特大学和格罗宁根大学,自那时以来也使用了这种方法,最近,作者小组在南非开普敦大学和挪威卑尔根大学发起了新的PEPT活动。
PEPT的方法在许多文章中都有描述。简单地说,放射性示踪剂的衰变导致两个光子的背对背发射,这两个光子通常由一组传感器探测到,但并不总是排列在视场周围的环形中。这两个光子定义了一条“反应线”(LOR),因此粒子就位于这条线的某个位置,尽管这一过程存在一定的散射。与PET(正电子发射断层扫描)(主要用于医学应用)中使用的云示踪剂结合图像重建算法不同,PEPT中使用单个LORs通过交叉三角测量跟踪单个粒子(见下图3)。
随着硬件的不断完善,PEPT的时空分辨率不断提高,为提高空间分辨率,作者课题组不断研究交叉三角测量算法。
传统PEPT应用于跟踪颗粒相对缓慢移动的过程,例如在旋转滚筒和流动床中。然而,分辨率的提高使得将该技术应用于更快的过程成为可能,例如旋风分离器和气力输送管线中的颗粒运动(Chan等人,2009a、b、c;Chang等人,2011;Middha等人,2013;Sovechles等人,2017)。
本文的目的是利用PEPT技术,阐明水力旋流器主要作用于水,或不同粘度的液体的各方面工作。PEPT技术是一种对单个颗粒进行拉格朗日跟踪的方法,可以揭示流体和颗粒流的特征。而其他方法是无法实现的,如激光多普勒测速和颗粒图像测速,在固定的空间位置进行测量等。为了更好地理解PEPT结果,在与实验结果完全匹配的系统中进行了CFD仿真。
3.实验研究
实验所用的PET(正电子发射断层扫描)相机是位于霍克兰大学医院的西门子Truepoint扫描仪。扫描仪中有三个传感器环,每个环的直径为855.2mm,由48个传感器块组成。每个块体包括13times;13个硅酸镥(LSO)闪烁体晶体,尺寸为4times;4times;20mm。一个晶体间隙在轴向和径向上分开这些块。这些环在径向上有672个晶体位置,即48个晶体间隙和13times;48个晶体。轴向上共有41个晶体位置,即2个晶体间隙和3times;13个晶体。这使得视野的长度在轴向为164mm。闪烁探测器为gamma;射线(511keV光子)提供了高阻抗效率,具有良好的能量分辨率。
设备示意图如图2所示。
水力旋流器本身的设计是为了适应扫描仪的视野。旋风分离器的尺寸如表1所示。
图3显示了安装在扫描仪视野内的旋风分离器以及记录的示踪粒子的一些响应线(见Hoffmann等人,2005)。获得的反应线数量取决于示踪粒子的活性。
示踪粒子为强阴离子交换颗粒,Amberlyst A26型氢氧化物(来自Acros机构)。测量粒径为430plusmn;56 mu;m,这是用显微镜测量的平均值加/减粒径的标准偏差得到的。浸泡在水中的颗粒的包络密度是通过在水中的沉降实验确定的,为1080到1120kg/m3之间。这意味着粒子的斯托克斯数决定其行为的因素(Hoffmann和Stein,2007年):
当以水(密度,rho;=1000kg/m3,mu;=1times;10-3kg/ms)作为流体,入口流速到达0.07704时,就与含有dp=104mu;m的粒子(密度rho;p=2700kg/m3)的水相同。注意到示踪粒子密度非常接近载体流体密度,因此只有对颗粒或流体密度的轻微修改,才会产生明显不同的斯托克斯数。推导斯托克斯数的一个关键假设是斯托克斯阻力,它可能并不适用于所有情况,特别是在分子效应或颗粒雷诺数高于斯托克斯阻力极限的气体旋风分离器中。Israel和Rosner(1982)讨论了惯性分离器的这一问题,并得出了一个广义斯托克斯数,讨论了其对颗粒分离的重要性。
将示踪粒子浸入0.6ml18F水溶液中进行标记,将其搅拌约10分钟,同时将18F离子附在多孔颗粒表面上。通过这些实验得到的粒子活性通常在450-1440mu;Ci范围内。标记技术不断提高。
Hoffmann等人开发的一种算法(2005),用于消除(X-Y平面上)虚假和分散的二维切点,并计算其余切点的优化平均值,从而提高了计算时空分辨率。在随后的研究中,为了检验标记方法和定位算法,计算了水中静止粒子的质心在所有三个坐标方向上的1000个位置(每毫秒确定一个位置)的标准偏差低于100mu;m。是否在一个静止的粒子上进行是无关紧要的,毫秒平均粒子位置的不确定性仍然是正确的。对于运动粒子,连续的位置可以看作是一系列随机变量,例如k变量,可以是连续的毫秒位置或单个交叉三角测量。这些变量在统计意义上是独立的,但是有相同的方差,比如sigma;2,由于粒子的运动,它们有不同的平均值。这些变量的合并标准差将表明,在估计示踪剂粒子位置的不确定性时,示踪剂粒子是运动还是静止没有区别,而文献Sovechles等人(2017)中提及的相反说法是基于错误的。在目前的这些实验中,在一毫秒内检测到的响应线数量约为800条(Chang等人,2011年),足以达到上述空间分辨率。时间分辨率可以增加到0.5毫秒,或者通过在一毫秒内均匀划分数据的时间序列来更好地研究更快的移动。
为了阐明水力旋流器工作的各个方面,进行了大量的实验,即通过跟踪中性密度示踪粒子来研究液体粘度增加的影响、流量不足的影响和流量模式。表2显示了所进行的实验的概述。
解释这些结果,有助于了解旋风分离器的切割尺寸。这可以通过两种方式进行估算(Hoffmann和Stein,2007年)。
(1)使用经过测试的Barth模型。在该模型中,轴向向上流动的内涡被认为是在CS的表面内,CS的涡由壁延长到旋流器的底部,使CS内部的颗粒与旋流器分离,而向下流动的CS外部的颗粒被分离。因此,表面CS在Barth模型中假定为轴流向上的“内涡”与轴流向下的“外涡”分离的表面。在CS中平衡旋转的颗粒为分割尺寸。该颗粒在从CS入口到出口的过程中受到径向向内的阻力,这是由于流体流动(假设是均匀的)穿过CS,并由于旋转受到向外的“离心力”。分割尺寸dp,50的估计值为:
通过CS的径向速度vrCS为,在CS处的切向速度vtheta;CS常由估算而得,这反映了涡旋外围气体的近无损涡旋运动(Peng 等人,2002)。
(2)通过使用几何相似旋风的现有实验数据进行缩放,利用经验事实,即颗粒分离效率是颗粒斯托克斯数的函数仅是颗粒直径dp的函数,即使两个旋风的旋风雷诺数不相同,但是只要雷诺数足够高就可。
这里我们使用等式(1)。表2中列出了所有实验,包括分割尺寸的估计值。每次实验都可能包括许多轨道,因为一个或多个示踪粒子多次穿过旋涡,因此获得了大量的数据。
4.数值计算
4.1CFD软件与数值模型
计算模拟采用CD-ADAPCO的商用CFD程序STAR-CCM 版本6.06.017。参考文献Pisarev等人(2011)给出了所求解的方程的全部内容,但本文简要讨论了方程的自包含性。
对于不可压缩流体流动的大涡模拟(LES),将空间滤波应用于流动变量。对于可能是流体速度或压力组成部分的任意流量变量,空间滤波为:
其中G(X)是与一个计算单元的大小相关的空间坐标的适当函数。D是过滤波的宽度,其大小与计算单元的大小相似。
将该滤波应用于Navier-Stokes方程得出:
通过这种方式,在时间相关模拟中直接模拟大于一个计算单元的气流特征,包括较大的涡流,而子网格湍流(由子sub-SGS表示)对气流的影响仍然需要建模。校准过的粘性应力张量为:
其中是应变张量的变化率。等式(3)中的未知
全文共15039字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[943]

