Optics Communications 433 (2019) 1–9
Contents lists available at ScienceDirect
Optics Communications
journal homepage: www.elsevier.com/locate/optcom
使用盖革模式雪崩光电二极管探测目标激光二次反射回波的研究
Xin Zhou a, Jian-Feng Sun a,lowast;, Peng Jiang b, Di Liu a, Xiao-Jing Shi a, Qi Wang a
a 国家可调谐激光器科技重点实验室,光电研究所,哈尔滨工业大学 , 哈尔滨, 黑龙江 150001, 中国
b 北京机电工程研究所, 北京 100074,中国
文章信息
关键词:
盖革模式雪崩光电二极管
二次反射
激光雷达
泊松统计
摘要
盖革模式雪崩光电二极管(gm-apd)激光雷达(LADAR)进行空对地探测时,能探测目标与地面连续反射的回波,导致了激光雷达获得的图像中产生错误目标。本文将连续被两个表面反射的回波称为二次反射回波,仅反射一次的回波称为单反射回波。考虑到gm-apd探测光子的优越性,我们对gm-apd探测目标二次反射激光回波的触发特性进行了调查和分析,并且,利用阵列gm-apd进行了近场和远场二次反射回波探测实验,验证了阵列gm-apd能够有效地检测二次反射回波,本文为研究二次反射对gm-apd图像的影响奠定了基础。本文首先利用包含Ladar测距方程和泊松概率模型的回波触发模型和蒙特卡罗模拟方法,从理论上完全地验证了用gm-apd检测二次反射回波的可行性。理论结果表明,gm-apd能够探测到二次反射回波,视场越宽,探测距离越长,激光雷达的位置越高,目标二次反射回波强度越低,地面单次反射回波强度越高。然后,利用64times;64和32times;32阵列的gm-apd分别对远场中的室内场景和移动车进行检测,结果表明,室内实验得到了完整的第一和第二反射图像,单像素可以检测到来自多个目标的二次反射回波,也可用于远场实验。在单帧图像中可以得到单反射回波和第二反射回波,在这种实验条件下,研究了两个像素点,分别实现了25.6米和41.9米的距离扩展,这表明gm-apd可以在远场中检测到错误目标;最后,提出分别利用静态目标的多帧统计和运动目标触发位置的时间序列图像来寻找二次反射面的方法,以消除二次反射图像。本文为消除目标识别前的二次反射提供了理论依据。
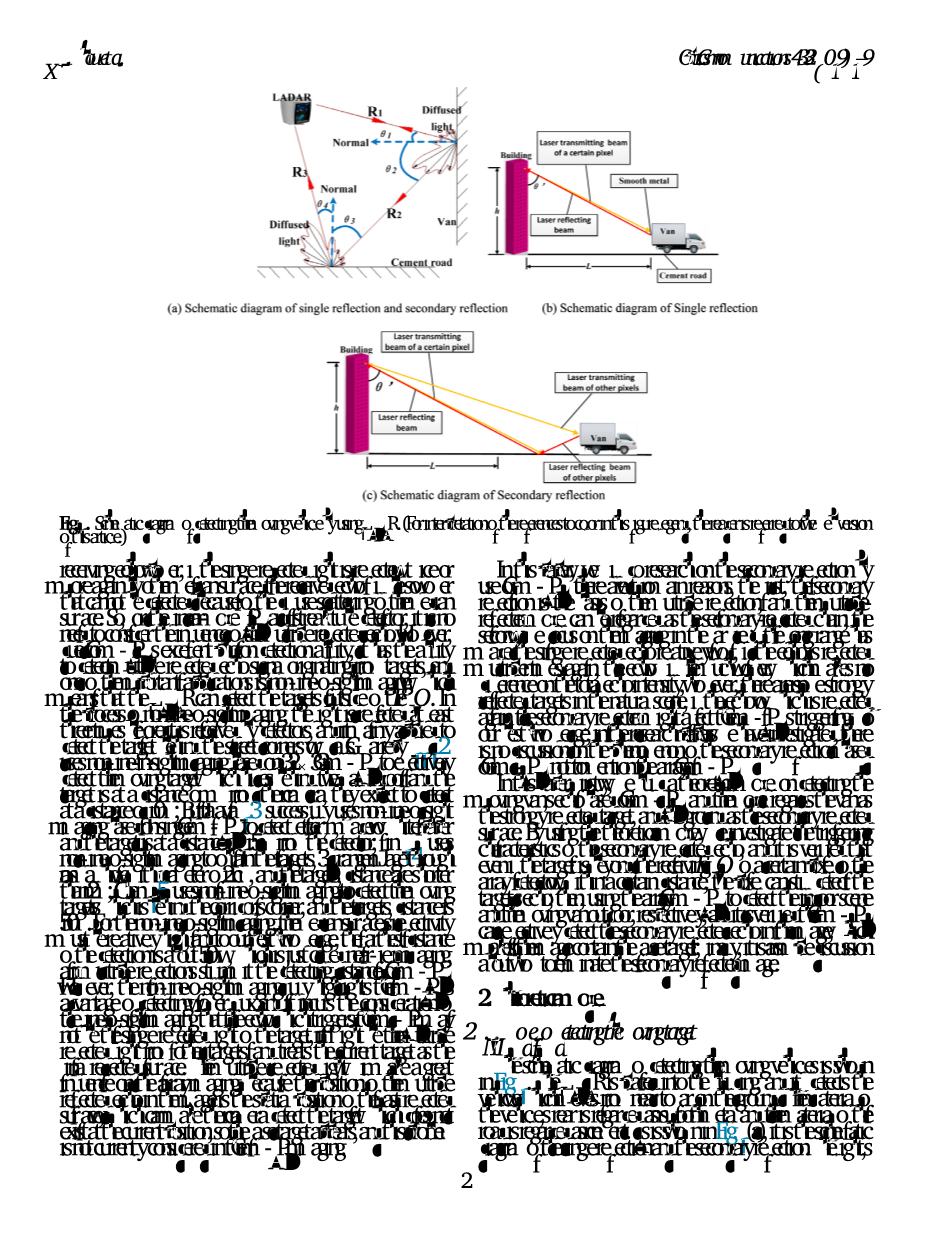
图1 利用激光雷达探测运动车辆示意图
1.引言
近年来,激光主动成像技术越来越受到研究者的重视,其潜力也在不断挖掘。目前,激光雷达已广泛应用于军事和民用领域,如地形测绘、避障、目标识别、武器制导等。 探测器的探测灵敏度对激光主动成像技术有很大影响,主要影响激光雷达的最小可接受能量。gm-apd作为一种单光子探测器,可以在很低的光子水平上捕获回波,与线性模式apd和条纹管探测器相比具有更高的探测灵敏度,因此基于gm-apd的激光雷达已成为激光雷达领域的一个重要分支。
本文将连续被两个表面反射的回波称为二次反射回波,仅反射一次的回波称为单反射回波。目前,用于远场目标检测的激光雷达主要采用视线成像,即目标在视场范围内,探测器主要直接接收目标的单反射回波。检测单反射回波的原因是接收回波功率与反射回波功率成反比关系,导致接收回波功率较低,如果单反射光再被其它中间面反射两次或多次,接收到的回波会由于中间表面的漫反射散射较低从而无法检测到。
图2
因此,对于线性模式APD和条纹管探测器,不需要考虑多次反射回波的影响。然而,由于gm-apd具有优良的光子探测能力,它具有探测来自目标的多个反射回波信号的能力,其中一个重要的应用是非视线成像,这意味着激光雷达可以探测视场以外的目标.Gariepy采用基于32times;32 gm-apd的非线内成像技术,有效地检测隐藏在室内墙后、距摄像机1米处的运动目标,他们期望检测到10m; Buttafava成功地使用基于单个gm-apd的非视线成像来检测由白纸组成的字母“T”,目标距离探测器1.5米; Jin采用非视线成像,通过直径为2 cm的小孔获得目标的三维距离图像,目标距离小于2 m; Chan使用非视线成像探测走廊角落后面的移动目标,目标距离为50米。然而,非视线成像充分突显了gm-apd探测低通量的优势,并考虑了视线成像,触发gm-apd的回波可能不是目标的单反射光,也可能是来自其他目标的多反射光,并把当前目标作为最终的反射面。 多反射光对阵列成像有很大的影响,因为多反射回波在图像中的位置是最后一个反射面的空间位置,可以使相机检测到当前位置不存在的目标,从而出现错误目标,而这个问题当前并未在gm-apd成像中考虑。
本文将利用gm-apd对二次反射进行研究,主要有两个原因:一是二次反射是多重反射的基础,多重反射模型可以看作是二次反射链;二是我们聚焦于远场成像,远距离使单反射回波相对较低,如果再反射多次,回波会低得多,对总回波强度没有影响,但在自然场景中有一些强反射目标,如果再反射一次,二次反射可能影响GM APD的触发。.据我们所知,在我们研究的论文中,没有讨论基于gm-apd的二次反射现象,更没有讨论阵列gm-apd。
本文首先建立了基于GM APD的运动车回波检测理论模型,该模型以运动车为强反射目标,地面为次反射面。利用该理论模型,研究了二次反射回波的触发特性,验证了即使目标超出阵列探测器某一像素的接收视场,在一定距离内,该像素仍能检测到目标的回波,然后利用阵列gm-apd检测室内分别对场景和室外移动车进行了探测,证明gm-apd能够有效地检测图像中的二次反射回波,使图像中含有错误目标;最后,对如何消除二次反射图像进行了简单的讨论。
理论模型
-
- 运动目标检测模型
图中显示了检测移动车辆的示意图。在图1中。激光雷达被放置在建筑中,它检测到在地面上从近到远移动的车辆。车辆后部的材料被视为光滑的金属,道路的材料被视为水泥。如图1(a)所示,为单反射和二次反射的示意图 自然物体的反射特性可以认为介于完全镜面反射和漫反射之间,反射光分布在整个2pi;角空间中,特别是反射光在镜面反射方向的强度最强。当激光经过R1距离,以theta;1的角度入射到货车表面时,激光将从表面漫反射,一部分漫反射光将直接反射到事件的相反方向,并被一个像素接收,另一部分光将经过R2距离,并与在地面上的角度为theta;3,则入射光的一部分以theta;4的角度反射,经过R3个距离后被探测器的另一个像素接收,如图1(b)所示,如果车辆不超出接收范围,激光雷达的高度为H,车辆的水平距离为L。某一像素的视场,该像素通过接收单个反射光来检测车辆。理论上,发射光(黄线)和接收光(红线)是同一条线,但为了区分这两种光,我们有意将它们分开。如图1(c)所示,如果车辆超过某个像素的接收视场,则像素通过接收二次反射光来检测车辆,二次反射光首先由车辆反射,然后由路面反射。在这种情况下,像素不仅检测地面的回声,而且还检测车辆的回声。因为漫射光分布在整个2pi;角空间,所以目标的整个被照射区域对固定像素的二次反射信号有一定的帮助。
gm-apd的回波检测模型由两部分组成,首先,通过激光测距方程计算接收到的回波强度;其次,通过泊松概率模型计算GM APD的触发概率。如图2所示,是回波检测模型的流程图。主要有三个步骤:一是根据计算出的参数获得目标的光反射特性,如入射角和反射角、目标与探测器之间的距离、两反射面之间的距离等;二是根据激光雷达计算回波的光子数。测距方程;第三,计算目标不同距离的触发概率。
-
- 二次反射理论模型
激光雷达测距方程是光学雷达方程的一个推广,是描述了激光雷达系统的工作原理重要方程之一。方程如下
(1)
Pr为接收激光功率,Pt为发射激光功率,为激光束发散角,R为目标与激光雷达的距离,为目标的激光雷达截面(LRCS),t为激光的单向大气透过率,为激光雷达接收孔径的面积,和分别为激光束接收和发射的透过率。
如图1所示,目标和地面连续反射的回波功率可以表示为:
(2)
其中R1、R2、R3分别为发射透镜与目标之间的距离、目标与地面反射点之间的距离、反射点与接收透镜之间的距离,如图1(a)所示;T1、T2、T3分别为上述三个距离的单向大气透过率;1、2分别是车和地面的反射方向和表面法向之间的角度;A1和A2分别是车和地面的照明区域。
方程(2)可以清晰地描述二次反射的过程,二次反射的强度对目标的激光雷达散射截面有很大的依赖性。
表1 拟合参数
-
- BRDF模型
LRCS和BRDF(双向反射分布函数)之间的关系描述如下:
(3)
A是目标区域,0是单位区域的LRCS,fr是目标的BRDF,分别是激光入射方向和接收方向的角。
为了获得目标的BRDF,利用模型拟合由brdf测量仪获取的有限数据往往是一种很好的方法,然后通过拟合得到模型的参数,从而预测整个空间内的激光散射。本文采用五参数模型,包括镜面反射部分和漫反射部分。模型是
(4)
是激光入射方向和接收方向的天顶角,是接收方向的方位角,是激光入射方向和接收方向的中间矢量的天顶角,G是几何因子,kb是镜面反射系数,kd是漫射散射系数,kr,,b为待定参数。
在理论分析中,我们假定单个反射回波被车辆后部反射,来自车辆后部的二次反射回波被路面反射。因此,测量了光滑金属(其散射特性与车辆后部相似)和水泥块(其散射特性与路面相似)的BRDF。通过将实测数据与BRDF模型进行拟合,得到参数,拟合参数见表1。单反射回波的最终模型写为:(5)
是目标单反射光子数的速率函数,也是回波单位时间的光子数;h c/是单光子的能量,h是普朗克常数,c是真空中的光速,是光的波长;fr是目标的BRDF;r是激光雷达和目标之间的距离。二次反射回波的最终模型为:
(6)
是二次反射光子数的速率函数;fr1和fr2分别是货车后部和地面的BRDF;A1和A2分别是货车后部和地面的照明面积。
-
- Gm-APD触发概率模型
gm-apd的触发过程分为三个步骤:(1)触发过程光子吸收过程中,探测器吸收背景噪声和目标回波;(2)被吸收的光子和暗计数产生随机数的初级电子,由目标回波引起的初级电子数服从负二项分布,由背景噪声和暗计数引起的初级电子数服从泊松分布。由于负二项分布与泊松分布的差别很小,为了便于计算,通常将目标回波引起的一次电子数视为泊松分布;一次电子触发雪崩效应,理论上只有一个一次电子能触发雪崩效应,输出信号。对于泊松过程,在t1到t2之间产生k事件的概率:
(7)
N为:
, (8)
而r(t)是触发过程的速率函数。对于gm-apd,k事件是k作为主电子,速率函数可以描述为:
(9)
是量子效率,n1(t)和n2(t)分别是噪声和回波的速率函数,n1(t)被认为是常数,n2(t)与回波波形的强度有关,不考虑湍流引起的脉冲扩展和目标的斜率,通常是q开关激光波形。Nd(t)是暗计数的速率函数,非常小,本文忽略了暗计数。回声的光子数和速率函数之间的关系表示为,
(10)
Nr(t1,t2)是t1和t2之间的光子数。t1与t2之间触发概率是:
(11)
是探测器没有被触发的概率,即产生零个主电子的概率。
图3 单反射对二次反射触发概率的影响。
二次反射探测特性
-
- 地面单反射光对二次反射探测的影响
因为gm-apd的触发服从泊松概率,先前接收到
英语原文共 9 页
资料编号:[3580]

