
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
关于圆检测的霍夫变换方式对比研究(学习)
本文研究了基于霍夫变换变化的各种圆检测方法,包括标准霍夫变换法、李等人的快速霍夫变换法、两阶段霍夫法和基于Gerig和Klein设计的两种节省空间的方法,并对每种方法的性能进行了分析。对合成图像和实际图像进行了对比分析,给出了各种方法的准确度、可靠性、计算效率和存储要求等方面的数字和注释。
关键词:霍夫变换法、圆检测、性能
近年来,人们提出了几种基于霍夫变换(HT)的寻圆方法,以及一些快速实现HT变换的通用技术。这些方法都声称可以提高效率、存储速度以及可靠性,但在大多数情况下,与其他方法的比较是肤浅的。本文讨论了基于霍夫变换(HT)的寻圆方法。考虑了一些基于Hough的圆查找算法,并详细检查了它们的特性。该研究并不详尽,但它涵盖了许多建议的方法,包括标准的HT、Gerig和Klein方法(有和没有边缘方向信息)、二阶段法(在参考文献3和4中讨论)和使用快速Hough变换。在某些情况下,这些算法是以其原始形式实现的,但在其他情况下,需要进行一些扩展和改进。该研究是实验性的,并给出了计算效率、存储要求、真实和合成方法的可靠性和准确性的结果。TIC图像。我们工作的一个一般结论是,HT方法的更复杂的变化不一定比直接方法好。
本文介绍了寻找圆的问题及其基本思想,并简要介绍了本文所研究的五种基于高温的方法,给出了每种方法的实验结果,讨论了研究中出现的几个问题,最后给出了工作的简要结论。
利用HT寻找圆
形状分析的HT方法使用一个约束方程,将特征空间中的点与搜索到的形状的可能参数值相关联。对于每个特征点,总是边点,满足约束条件的所有参数组合都会累积投票。投票被收集到一组计数器中,称为AC。累积器数组。累积器数组是连续多维空间的离散表示,该多维空间跨越所有可行的参数值。边缘点从形状的一个实例依次投到累积器计数器中,该计数器最接近形状的参数。在投票或累积过程结束时,这些数组含有大量投票数的Ay元素表明存在具有相应参数的形状的有力证据。使用某种方法来识别累加器阵列中的峰值,从而检测形状。
duda和hart首先概述了使用ht检测圆的方法。如果圆由其中心坐标(a,b)和半径r参数化,则这些参数与边缘点(x,y)的位置有关,边缘点通过约束形成圆:
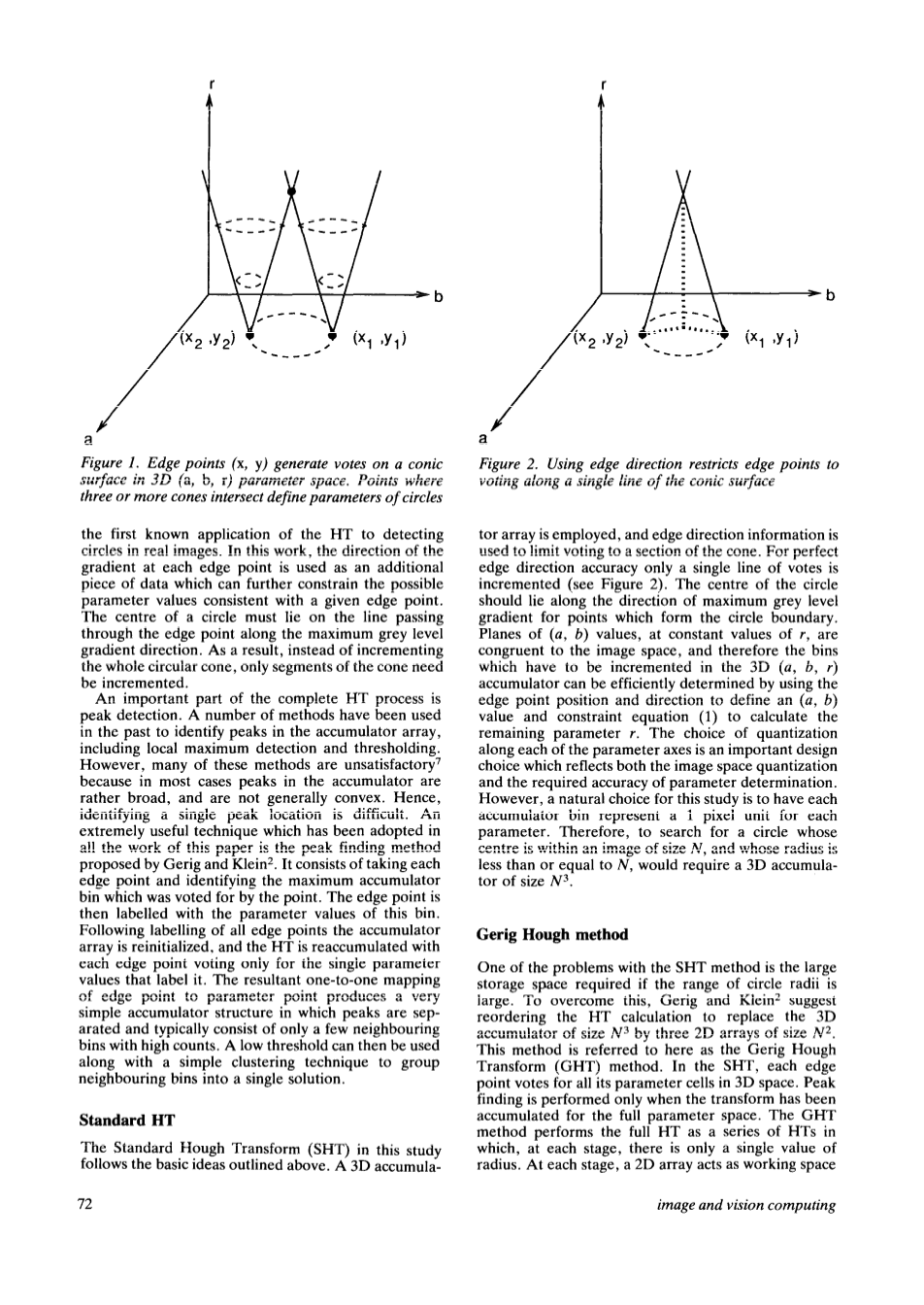
该方程还表明,任何给定的边点(x,y)都可以是在(a,b,r)参数空间中的参数位于右圆锥体表面上的任何圆圈上的点(参见图1)。如果锥体与多个边缘点相交在一个点上,那么所有的图像点都位于由三个PARAMET定义的圆上。Ers.Kimme等人6给出在实际图像中检测圆的第一个已知应用。在这项工作中,每个边缘点的梯度方向被用作一个附加数据块,它可以进一步约束与给定边缘点一致的可能参数值。圆的中心必须位于沿最大灰度梯度方向通过边缘点的线上,因此,不必增加整个圆锥,只需增加圆锥的部分。
整个热处理过程的一个重要组成部分是峰值检测,过去已经使用了许多方法来识别累加器阵列中的峰值,包括局部最大检测和阈值。然而,这些方法中的许多都不令人满意,因为在大多数情况下,蓄能器中的峰都比较宽,通常不是凸的,因此很难识别单个峰的位置。本文所有工作中采用的一种非常有用的技术是Gerig和Klein提出的寻峰方法。它包括取每个边缘点并识别最大值。由该点投票选出的最小累加器箱。然后用该箱的参数值标记边缘点。在对所有边缘点进行标记之后,累加器数组将重新初始化,并且每个边缘点只对标记它的单个参数值进行投票,从而重新累积HT。边缘点到参数点的一对一映射结果生成一个非常简单的累加器结构,其中峰是独立的,通常由仅对少数具有高计数的相邻存储桶使用低阈值,然后使用简单的聚类技术将相邻存储桶分组为单个解决方案。
图1.边缘点(x,y)在3D(a,b,r)参数空间中的圆锥曲面上生成投票。三个或更多个锥体相交的点定义圆的参数
图2.使用边缘方向将边缘点限制为沿着圆锥曲面的单条线进行投票
标准HT
本研究中的标准Hough变换(SHT)遵循上述基本思想。采用3D累加器阵列,并使用边缘方向信息将投票限制在圆锥体的一部分。为了获得完美的边缘方向精度,只增加一行投票(见图2)。对于形成圆边界的点,圆的中心应沿着最大灰度梯度的方向。在r的恒定值下,(a,b)值的平面与图像空间一致,因此,使用边缘点位置可以有效地确定3d(a,b,r)累加器中必须递增的垃圾箱。定义(a,b)值和约束方程(1)以计算剩余参数r的离子和方向。沿每个参数轴选择量化是一个重要的设计选择,它反映了图像空间量化和所需的参数确定精度。然而,本研究的自然选择是每个累加器箱代表每个参数的一个L像素单位。因此,要搜索一个中心在n大小的图像中且半径小于或等于n的圆,需要一个n大小的三维累加器。
格瑞格-霍夫法
SHT方法的一个问题是,如果圆半径的范围较大,则需要较大的存储空间。为了克服这一问题,Gerig和Klein2建议重新排序HT计算,以用3个尺寸为n2的二维数组替换尺寸为n3的三维蓄能器。
此方法在这里称为Gerig-Hough变换(GHT)方法。在SHT中,每个边点在3D空间中对其所有参数单元进行投票。只有在对整个参数空间累积变换后才进行寻峰。GHT方法将完整的HT作为一系列HTS执行,其中每个阶段只有一个单独的V半径的值。在每个阶段,一个二维数组充当转换累积和局部峰值查找的工作空间。
峰的特征是它们的位置、大小和变换的累积半径。峰的大小和半径信息可以记录在两个与工作数组一致的二维数组的适当的容器中(见图3)。然后重新初始化工作数组,并用于计算另一个值的变换。半径r的。对所有可能的不同半径值重复此过程。在该过程结束时,两个二维数组包含有关变换峰值的位置、大小和半径的信息。GHT方法的一个缺陷是,由于在两个二维数组的相应空间位置记录了峰值的详细信息,因此值结束如果两个圆圈共用一个位置,则写入。因此,在这个最简单的实现中,不可能存储同心圆的所有细节。
参考文献2中所述的GHT方法不使用边缘方向,因此每个半径值处的每个边缘点都会增加一个完整的圆。但是,通过合并边缘方向信息,可以提高GHT方法的效率。这种新方法在这里被称为带梯度的Gerig-Hough变换(GHTG)。。如果使用边方向,则仅递增沿边点梯度方向的圆形参数轨迹上的单个bin。
二阶霍夫变换
如果可以获得边缘方向信息,那么减少圆查找的存储和计算需求的一种方法是将问题分解为两个阶段,由一个2d-ht来查找圆心,然后再由一个1d-ht来确定半径(该方法已在参考文献3和4中使用)。该方法在这里称为2-1小时。h变换(21ht),如图4所示。由于圆的中心必须位于圆上CACH边缘点的梯度方向上,因此这些梯度的公共交叉点标识圆的中心。使用二维数组累积中心查找转换形式,并识别候选中心参数。d通过局部峰值检测。该方法的这一阶段可被视为沿半径轴的一个积分,所有的HT值在一个单一的值(a,b)。该方法的第二阶段使用第一阶段的中心参数和约束方程(1)来构造和分析可能的半径值的柱状图。半径历史记录。每个候选中心都有m,半径柱状图中的峰值表示圆的证据。
21HT方法的一个潜在问题是,二维中心查找累加器可能比三维空间更难分析,因为它是该空间的一个整体投影。此外,第一阶段参数估计中的任何虚假峰值或不准确都会影响第二阶段的性能。
图3,GHT方法使用三个2D阵列。数组(a)充当用于单个半径值的变换累积和分析的工作空间;数组(b,c)记录有关候选峰的位置,大小和半径值的信息
图4,21HT将圆检测问题分解为两个阶段。在(a)中,累积变换以找到中心坐标。在(b)中,为(a)中得出的每个候选中心建立了半径直方图
快速霍夫变换
李等人提出了一种称为快速霍夫变换(fht)的方法,该方法使用多维四叉树结构来同时积累和检测HT中的峰。在它们的公式形状中,参数化使它们映射到参数空间中的超平面。他们认为fht所需的存储量比sht.ttie算法所需的存储量要少。以层次搜索为例,将原始参数体积视为单个超立方体,如果在超立方体中对参数进行投票的图像点数大于阈值,则假定参数空间的相应区域包含一个参数峰值,并用D对该体积进行更详细的研究。将超立方体分解为子循环。这种累积分析和划分的迭代过程一直持续到每个超立方体体积达到所需的参数分辨率极限,或者超立方体降到定义峰值结构的阈值以下。对于fht树搜索算法,有几种可能的控制策略。在这种情况下工作中,采用了最简单的深度优先的政策。
最初的fht是基于参数化的使用,该参数化将形状映射到参数空间中的平面投票表面:超平面公式。当考虑使用梯度截距参数检测线或平面时,这种映射是自然的,并且作为有效的方法,可以设计用于增加参数空间体积与这些超平面交叉点的实验测试1.在超平面公式中可以发展圆查找,但我们的经验8表明,沿着参数轴产生的非线性会导致严重的问题。为了避免这个问题,提高fht的效率,我们使用了一个不同的公式,其中包含了边缘方向信息。这里将修改后的方法称为修改后的快速hough变换(mfht)。该方法使用了这样一个事实:具有位置(x;,y,)和梯度方向o的边缘点;在(a,b,r)空间中生成一个轨迹由点(Xi,Yi,0)向外指向的正交直线组成。这些直线与每个超立方体的中心之间的正交距离提供了一个简单的、近似的测试线是否与超立方体相交的基础。如果垂直距离小于超立方体上的对角线距离,则行。按照Li等人1的定义,在径向意义上与超立方体相交,超立方体接受投票。与最初的fht不同,此交叉测试不使用简单的增量更新公式。
fht算法的一个重要方面是选择投票阈值,它定义了何时出现峰值结构并继续进行划分。阈值太低会导致对参数空间的搜索效率低下,而阈值太高则可能导致小圆圈的检测效率低下。对于本文的工作,我们开发了一个自适应方案:首先选择一个高阈值,在一个较窄的半径范围内搜索较大的圆。然后将构成这些圆的边缘点从考虑中删除,并将mht应用于具有低阈值和小半径范围的其余点,以找到小的圆。
实验结果
本研究中所考虑的图像属于医学或冶金应用中常见的一类。此类应用通常涉及液体或金属液滴,这些液滴在图像中投射出近似圆形的图像。通常,此类图像包含许多尺寸范围广泛的过度研磨圆。一个重要问题涉及计数。不同圆的数量和数量分布的确定,如液滴大小和/或空间分布。许多形状检测方法都很难解决遮挡问题,以及通过边缘查找等方法提取轮廓的碎片性。合成图像中的每一个边缘像素都被随机选取的一个值涂抹在plusmn;5的均匀分布范围内。所示合成图像包含1397个边缘点和19个半径小于30像素的随机位置生成的圆。真实数据来自冶金实验,所示图像有3750个边缘点和大约有76个圆形,大小不等。所有的算法都是在一台uvax-2计算机上用pascal实现的。
图5.从合成图像中提取的边缘数据
图6.从真实图像中提取的边缘数据
准确性
通过测量估计值(A、B、R)与用于合成图像的已知参数之间的绝对误差,利用合成图像确定每种方法的精度。图7显示了在所有图像上平均的方法的CACH的这些误差测量。可以看到,所有方法都表现良好,并且平均实现参数估计的亚像素精度。在大多数情况下,误差为0或1像素。
可靠性
在本研究中,术语可靠性包括两个影响:找到真圆的概率和检测假阳性的机会,即结合来自不相关边缘碎片的证据而产生的圆检测。图8显示了正确检测到的圆数和假检测数作为图8a显示了合成图像中真圆的分数。所有方法得出的数字都大于0.8。图8b显示了典型真实图像中真圆的分数。可以看出,正确识别的圆的数量下降了,在许多情况下都非常显著。但是,有原因-ab关于每种方法的相对排序的一致性:首先是GHTG方法,其次是SHT和MFHT方法。GHT方法是最差的方法。21HT在合成图像上表现得很好,但在复杂的真实图像中会恶化。这与第一阶段小圆圈作为累加器空间丢失有关。是对所有半径值的投票投影。在21ht方法的第一阶段,对应于小圆的小峰值会丢失。图9显示了基于GHTG方法检测到的圆参数的图6真实图像的重建。可以看出,即使是非常小的圆,重建也非常好。图8c显示了在真实图像中发现的假阳性的部分。这些值通常对应于小圆圈的假检测。在合成图像中,所有“ASP”中的假阳性几乎为零。
图7.作为方法函数的参数(a,b,r)估计的绝对误差平均值
图8.检测率作为图像中真实圆圈数的一部分。(a)在合成图像中找到的正确识别的圆圈;(b)在真实图像中找到的正确识别的圆圈:(c)真实图像的误报率
图9.使用从G HTC方法导出的参数重建真实图像中的圆圈
存储和计算效率
每个方法的存储和计算时间如图10所示。除MFHT外,所有方法都使用了一个累加器大小,它允许确定每个参数的精度为1像素。对于256times;256图像,中心坐标可以在图像中的任何位置,但圆的半径假定小于35像素。ELS,即标准的HT要求存储256times;256times;35个整数存储位置。在MFHT中,终端循环被设置为对应于1个像素的参数精度。MFHT方法使用的存储包括动态分配的空间,用于存储树搜索中节点和节点属性。每个节点的存储量可以是相等的。te large,正如li等人1所建议的,维护标志指示哪些边缘点对每个节点有贡献。
方法的计算效率由算法的CPU时间来衡量。
虽然这不是一般意义的度量,如复杂度分析所提供的度量,但从粗略的意义上说,它的使用是合理的,因为除了MGHT之外,所有算法都有很多共同点。
图10所示的数字是CPU时间
全文共8835字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[215],资料为PDF文档或Word文档,PDF文档可免费转换为Word

