
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
从里兹 - 谢普的路径到连续曲率路径 - 第一部分:过渡方案和算法
摘要 - 本工作考虑了汽车式机器人的实时连续曲率(CC)路径规划。 其目的是因为与Reeds-Shepp(RS)的路径规划与各种CC路径规划结果相比,它在计算效率和可靠性方面仍然是更好的选择。 与[1]类似,本文对RS路径进行后处理以强制执行CC属性,同时确保RS路径附近包含的CC路径是保持障碍物为0的状态。 关于降低对可靠性和计算效率的影响,我们利用由mu;相切条件[2]投射的几何见解来后处理RS路径。 具体而言,针对每种类型的不连续曲率路口设计了独特的后处理方案。 所提出的方案虽然不是最理想的,但是很直接,导致CC路径规划能在计算可忽略不计的情况下保证完整性。 所提出的方案和结果算法的有效性通过数值模拟来验证。
一引言
几十年来,机器人的路径规划已经被广泛研究,考虑到运动学,动力学和环境约束[3] - [5]。 由于其广泛的应用[10],绝大多数研究工作都面向具有非完整动力学的机器人[6] - [9],特别是类似汽车的机器人。
开创性工作[7],[8]表明,最短路径称为Reeds-Shepp(RS)路径,是最小转弯半径的线段和切向圆弧的组合。 尽管如此,RS路径具有有限数量的不连续曲率路口(DCJ),导致静态转向,这是导致轮胎磨损的原因。
旨在解决RS路径的局限性,许多贡献为类似汽车的机器人提出了连续曲率(CC)路径。 工作[11] - [13]建立了最短长度的CC路径,它由回旋曲线和线段组成; 然而,它们在线段存在时表现出无限的颤动。 这个发现激发了搜索次优CC路径。 例如,工作[2],[13]提出了一组次优的CC路径,它们由回旋线和线组成。 次优CC路径是RS路径的泛化,因为它们共享完全相同的模式。 对[2],[13]的扩展可以在[14]中找到,它提供了计算这种CC路径的分析公式。 工作[15]基于Be#39;zier曲线设计CC路径拟合[16],并开发了一种数值有效的计划方案,该方案仅适用于前进式机器人。
假设在无障碍环境下,上述现有技术通常用于实现基于分解的路径规划中的局部转向[4],[9],[17]。 据了解,探索无碰撞配置空间涉及大量的转向操作。 为了实现实时路径规划,底层控制算法的计算效率是非常重要的。 最近的工作[14]测试了RS转向和次优的CC转向,并证明后者大约慢了10倍。
这项工作执行CC路径规划,希望达到与RS路径规划类似的计算效率。 所提出的CC路径规划包含两个阶段:首先计算RS路径,其中RS路径与容差无冲突; 那么根据RS路径构造CC路径。 由此产生的CC路径必须留在RS路径的邻域内,用公差表示,以确保无冲突。 值得注意的是,[1]中已经利用了类似的想法。 然而,工作[1]采用最优控制理论,最终解决边界价值问题。 相反,通过利用mu;相切条件[2],这项工作提出了处理DCJ的转换方案并开发了算法,这保证了CC路径以有效的方式成功构建。
minus;
本文的其余部分安排如下。 第二部分介绍了一个类似汽车的机器人的运动学模型,并阐述了RS路径后处理问题。 在第三节中,我们提出CC转换方案和算法来完成这种转换。 第四部分通过仿真验证了所提出的方案和算法。 第五部分总结发言
二准备工作
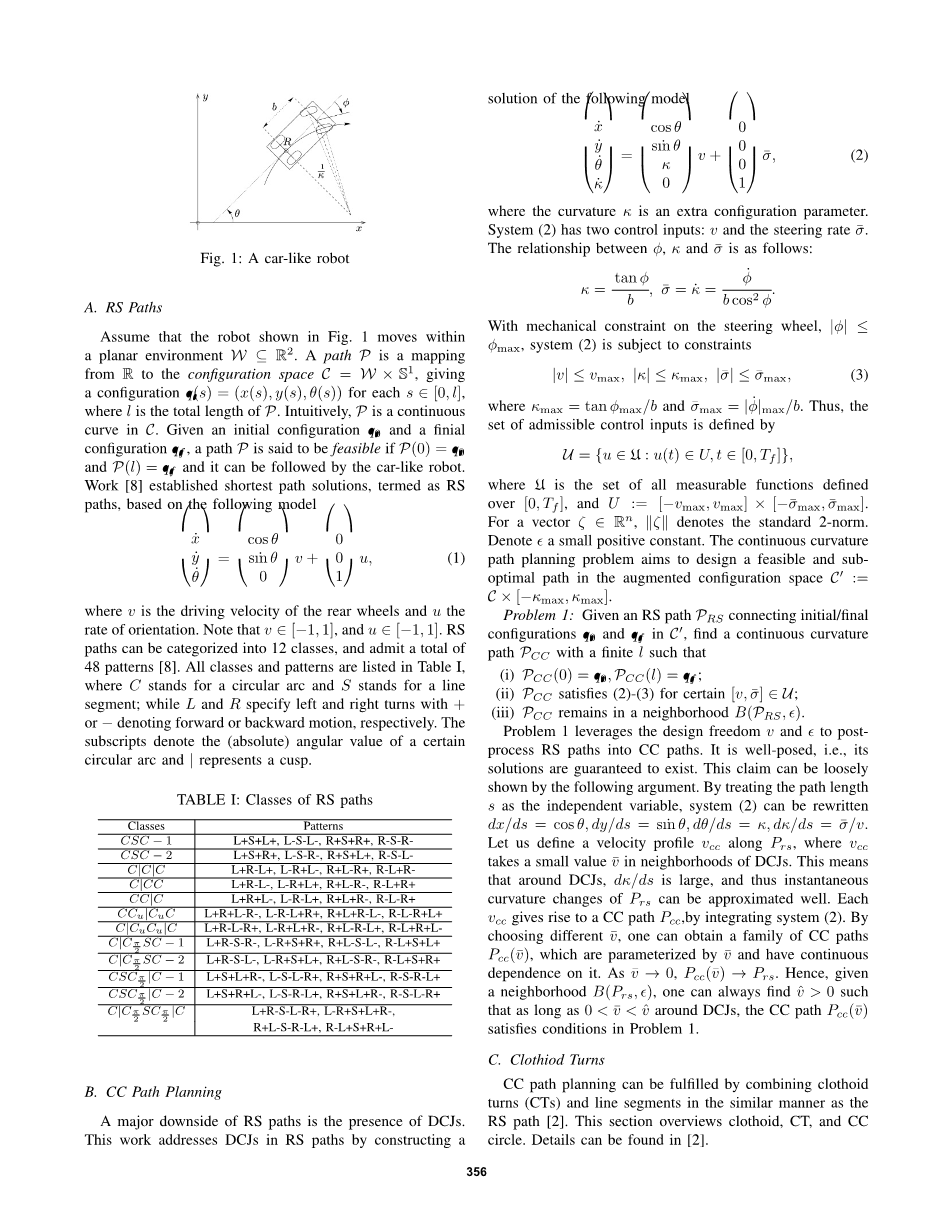
如图1所示的一辆汽车式机器人配备了一个前置式方向盘和固定的平行后轮。 点R位于后轮的中间位置。 机器人姿态由三(x,y,theta;)唯一地描述,其中(x,y)表示全局框架中R的坐标,theta;是机器人相对于x轴的方位角。 机器人具有轴距b和转向角phi;。
A.RS路径
假定图1所示的机器人在其内移动平面环境Wsube;R2。 路径P是从R到配置空间C = Wtimes;S1的映射,给出每个sisin;[0,1]的配置q(s)=(x(s),y(s) 0,l],其中l是P的总长度。直觉上,P是连续的曲线 。 给定一个初始配置q0和一个终端配置qf,如果(0)= q0和(l)= qf,路径被认为是可行的,并且它可以跟随汽车状机器人。 工作[8]根据以下模型建立了最短路径解决方案,称为RS路径
C
P P
其中v是后轮的驱动速度,u是取向速度。 请注意v [1,1]和u [1,1]。 RS路径可以分为12类,共有48种模式[8]。 表I列出了所有类别和模式,其中C代表圆弧,S代表线段; 而L和R则分别用 或者表示向前或向后运动来指定左转和右转。 该下标表示某个圆弧的(绝对)角度值,表示一个尖点。
minus;
isin; minus; isin; minus;
B.CC路径规划
RS路径的一个主要缺点是DCJ的存在。 这项工作通过构建一个RS来解决RS路径中的DCJ问题
其中曲率kappa;是一个额外的协调参数。系统(2)具有两个控制输入:V和转向率alpha;。pi;、kappa;和alpha;的关系如下:
由于方向盘受到机械约束,系统(2)受到限制。
、
因此,可接受的控制输入组定义为:
连续曲率路径规划问题的目的是在增广协调空间中设计一个可行的次优路径。
问题1:在初始路径qo和qf的RS路径PRS。找到一个连续曲率路径PCC。
(i)PCC(0)=qo,PCC(f)=qf
(ii)PCC满足(2)-(3)
(iii)PCC保持在B点附近。
问题1利用设计自由度v和E将RS路径后处理成CC路径。 它是合适的,即它的解决方案保证存在。 以下论点可以松散地显示此声明。 通过将路径长度s作为自变量,可以将系统(2)改写为dx / ds =costheta;,dy / ds =sintheta;,dtheta;/ ds =kappa;,dkappa;/ ds =sigma;/ v。 让我们定义沿着PRS的速度分布vCC,其中vCC在DCJs的邻域中取小值v。 这意味着在DCJ周围,dkappa;/ ds很大,因此PRS的瞬时曲率变化可以很好地近似。 每个vCC通过积分系统(2)产生CC路径PCC。 通过选择不同的值,可以获得一系列CC路径PCC(v)它们被参数化并且是连续的。
C.Clothiod轮流
CC路径规划可以通过与RS路径[2]类似的方式结合回旋线(CT)和线段来实现。 本节概述了布法,CT和CC圈。 细节可以在[2]中找到。
回旋曲线是其曲率kappa;相对于其弧长s线性变化的曲线, 即kappa;(s)=sigma;s s0,其中sigma;是回旋曲线的锐度并且s0是初 始弧长。 为简单起见,s0= 0。 集成系统(2)给出了沿 回旋线的配置 。
、
CT的挠曲可以与回旋曲线完全相同地定义。 取决于其 偏转delta;,CT可以由多达两个回旋曲线和一个圆弧组成。 图2说明执行左前转操纵的CT,其中不失一般性,CT以 q s =(0,0,0,0)开始。 该 CT,例证情况2delta; c le;delta;lt;2delta; c pi;,由下式组成
(i) 从TF s 到q1的回旋曲线,满足sigma;max;
(ii) 半径为kappa;的圆弧和角度delta; - 2delta; c ,从q1开始并且结束于q2
(iii) 从q2开始的具有清晰度的第二个回旋曲线sigma;max;并结束于qt0
当delta;=0时,CT减小到长度为2R的线段在这里,期望的sigma;是由下式给出:
每个回旋体的长度为ISPdelta;/alpha;。2delta;C pi;<delta;<2pi;的情况对应于左后向运动,可以类似地对待。
图2:在qs处起源的CC环C ,C ,Cminus;和Cminus; CC Circle是从几何角度简化CC路径规划的关键概念。 图2显示了与配置q相关的四个CC圆圈每个CC圆的中心与其各自CT的圆弧完全相同。 例如,CC圆C (qs)的中心Omega;与在q1处与机器人方向相切的圆弧中心重合。 Omega;的坐标由下式给出
给定kappa;max和最大值和CC圆半径由下式给出
在qs中,机器人取向与CC圆的切线向量之间的角度
三、连续曲率过渡
在直线段和圆弧之间,特别是SC,CS,CC,C C之间的连接处。本节开发处理这四种类型的DCJ的方案。 也就是说,我们对问题1进行研究,PRS仅限于一个包含一个DCJ的简单RS路径。
|
A SC转换
我们研究如何在直线和圆弧之间进行CC转换。 不失一般性,这相当于每个回旋曲线的长度是delta;/sigma;。 2delta;c pi;delta;lt;2pi;的情况对应于左后向运动,并且可以被类似地处理。
le;
问题2:设一个简单的RS路径
- 由-infin;lt;x0le;xle;0和y = 0描述的线S
- i圆弧C,在原点(0,0)与S相切。C的半径和夹角分别由kappa;max-1 和Th给出
构建CC路径PCC同时满足问题(1)中条件(I)-(II)。
图3:一个简单的RS路径:SC型简单RS路径
- SC过渡方案:由于空间限制,我们假设theta;gt;2delta;c。 为了在S和C之间建立CC连接,提出了以下SC转换方案
- 从初始C0=(X0,0,0,0)开始的向前直线段,并在X0 (x,0,0,0)处结束。
- 一个右右CT,其起始于qg=(x,0,0,0),并以q1=(x1,y1,delta;,0)结尾
- 一个向左前的CT,其delta;从q1开始,结束于q2=(x2,y2,0,0)。
- (iv)连接Q2和Q3=(x3,y3,delta;c,kappa;max)的左前回旋线,使得点(x3,y3)属于C
备注1:在delta;lt;2delta;c的情况下,可以找到sigma;SCsigma;最大,使带有sigma;SC的左前方回旋体产生挠度delta;SC delta;/ 2。 在左前方回旋体和圆弧体之间可以形成连续的曲线连接
图4示出了确定SC过渡方案中的参数的过程,即QS、Q1、Q2。
- 如图4所示,CC圆和圆弧C共用同一中心Ω3=(0,kappa;- 1 max),然后q2的坐标由下式计算
(ii)考虑到Q2是左前向CT的终点坐标,可以立即确定CC圆C l的中心Ω2。
(iii)对于某一X,CC圆C R(qs)具有中心x 1(x*),由x唯一地解。另一方面,对应于从QS开始的右CT的CC圆C R(QS)应该与C L(Q2)相切。因此,X可以通过求解以下非线性方程来确定。
(v)用x*,Ω1=(x Ω1,y Ω1)和Ω2=(x Ω2,y Ω2),计算辅助角alpha;。
两个CT的偏转由delta;和-delta;给出,其中delta;=alpha;-pi;/ 2 mu;。 直线段的长度由xlowast; - x0给出。
图4:SC转换方案
- SC过渡算法:算法1总结了前面的过程。CCP—Sc算法将初始和周期函数q0、qf以及误差界作为输入。初始设计参数sigma;0是以满足theta;gt;2delta;c的方式进行选择。 首先,CCP SC算法计算(第2至9行)适当的sigma;最大,使得y2E保证CCB(RS,E)在获得sigma;max之后,CCP SC算法计算对应的xlowast;。正如在计算过程中所解释的那样,xlowast;应同时满足(7)和路径约束x0lt;xlowast;lt;0.我们将(7)简化为基于简单几何分析的第13行中的等式。一旦得到正确的解终止循环。
B CC转换
在RS路径类中,两个半径为的Kmax-1圆弧可以连接。 我们在这里处理一个CC连接(没有尖端)。 CC转换问题的数学表述如下所述。
问题3:设一个简单的RS路径
(i) 从原点q0=(0,0,0,0)开始并终止于A的圆弧C1.C1的半径和角度由kappa;minus;1和theta; 决定
(ii) 在A处与C1相切的圆弧C2移动,在与C1相同的方向上,并且具有半径Kmax-1和角度theta;2
构造保留在B(PCC,E)中的CC路径满足问题1中的(i) - (ii)的条件。
程序如下:
为了说明目的,我们假设theta;1[0,pi;](逆时针)和theta;2[0,pi;](顺时针)。 这种情况如图5所示.C1和C
全文共7793字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[17356],资料为PDF文档或Word文档,PDF文档可免费转换为Word

