英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
钢筋混凝土梁的剪切变形模式
由一胜敏(Toshikatsu Ichinose)和Kat口胜树(Katsuki Takiguchi)
抽象的:构件的二维应变分布可以分解为一系列代表简单几何变形模式的正交应变模式张量。该级数的膨胀系数是通过在构件上积分应变张量和众数张量的乘积而获得的。构件的挠度也可以分解为变形模式的贡献之和。该方法应用于带腹板开口的钢筋混凝土梁的测试结果。对于该梁,通过应变计网络测量二维应变分布。梁剪切失败。大约达到剪切强度后,观察到的变形模式与现行塑性理论给出的变形模式非常吻合。
介绍
在过去的十年中,塑性理论已成功地应用于钢筋混凝土构件的剪切破坏问题。应该特别注意蒂尔里曼及其同事(9)以及尼尔森及其同事(8)的贡献。该理论有助于更好地理解剪切破坏机理。它已经在1978年的CEB-FIP标准规范(3)中获得认可。基于塑性理论的设计方法与传统方法相比,经验性要差得多。新方法的唯一经验方面是引入了混凝土塑性抗压强度的有效因子。选择该因素以在理论和实验强度之间取得良好的一致性。尼尔森(Nielsen)及其同事(8)表示该系数是混凝土抗压强度的函数。Collins和Mitchell(2)表示该因子为主要菌株的函数。
通常认为,通过比较理论和实验破坏载荷,已经验证了塑性理论的适用性。但是,这样的验证尚无定论,因为有效性因素本身是通过比较理论和实验失效载荷来确定的。
另一个可能的验证是将理论变形模式与实验观察到的模式进行比较,因为塑性理论(上限理论)提供了变形(或破坏)模式作为解决方案。迄今为止,仅通过直观地将测试裂纹的破裂模式与理论失效模式进行比较,才可以直观地采用这种方法。通常,这不可能是
日本名古屋市名古屋市技术研究所名古屋研究所建筑学系副教授,日本466。
2个日本东京工业大学建筑系教授^东京152,日本。
注意:讨论开放至1987年9月1日。为了将截止日期延长一个月,必须向ASCE Journals经理提出书面要求。该论文的手稿已于1986年7月7日提交审查并可能发表。本文是《结构工程杂志》第1卷的一部分。 1987年4月,第113卷,第4期。 copy;ASCE,ISSN,编号0733-9445 / 87 / 0004-0689 / $ 01.00。论文编号21393。
被认为是对该理论的可靠验证。
可以通过精心设计的实验来测量试样的二维变形模式(4)。但是,测得的变形模式太复杂,无法与理论模型直接比较。因此,应该开发一种方法来简化测得的应变分布,以便进行定量比较。
本文的目的是提出一种将构件的二维应变分布及其变形分解为几种简单几何模式的方法。该方法将应用于带有腹板开口的钢筋混凝土梁的测试结果。将分解结果与塑性理论预测的变形模式进行比较。
模式分解方法论
二维应变分解。-假定二维位移矢量u的分布在变形构件A中的各处都是已知的,如图1所示:
在第A节中所定义的内容··········································(1)
其中x和y是笛卡尔位置坐标。应变张量euro;通过微分位移矢量u来定义;
在第A节中所定义的内容··········································(2)
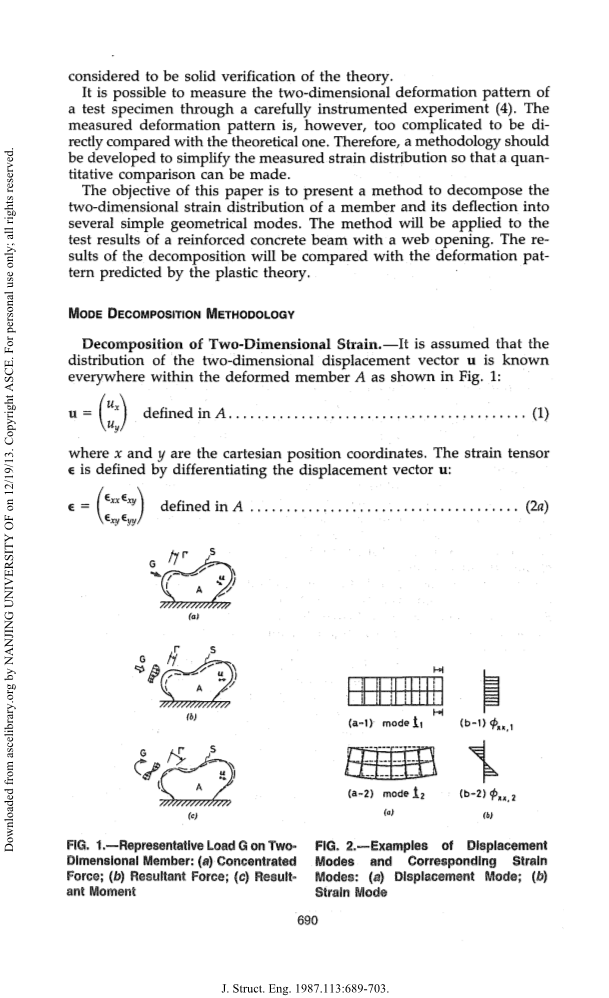
如图1.-二维成员上的代表性载荷G: 如图2.位移模式和对应应变模式的示例:
(a)集中力量;(b)联合部队;(c)结果时刻 (a)流离失所方式; (h)应变模式
接下来,我们介绍位移模式向量/ t(i = 1,n),
图2(a)中显示了代表纯延伸和纯弯曲变形的矩形构件的位移模式示例:
在第A节中所定义的内容·······································(3)
我们定义了相应的应变模态张量,(I 1,hellip;hellip;, n)微分位移模态向量t,如下:
与图2(a)中的位移模式相对应的应变模式在图2(b)中示出。只要满足以下两个限制,就可以任意选择位移模式矢量(或应变模式张量cjgt;,)的数量和形状:(1)位移模式向量t(必须满足边界条件(即,u = 0时为t,-0);和(2)应变模式张量f必须满足以下定义的正交性条件:
此后,我们将其称为等式的左侧。的积,并表示为:
内积相对于坐标系的旋转是不变的。图2中的示例满足正交性条件。
为了分解应变张量euro;,其膨胀系数a定义如下:
由于应变模式张量满足方程式的正交性条件。如图5所示,应变张量e可以大致分解为:
请注意,上述方程式两侧的内积与任何应变模式张量cjjj都等于等式。由于正交条件Eq。6a。5b。
因为应变张量e和应变模式张量lt;(gt;,7满足兼容性条件如图2a和4a)所示,位移矢量u也可以根据位移模式矢量t 1分解。如下:
变形模式的贡献。-假定沿构件S的表面已知外力矢量增量Aq的分布,其中S排除了如图1所示的位移边界条件规定的区域:
在这里,我们介绍了一个代表性负载G,它是表示外力矢量q的标量。可以选择代表负载G而没有任何数学限制;只需要考虑物理意义。在图1(a)中,G是集中负载的大小。在无花果中。在图1(b或c)中,G分别是合力或合力矩的大小。接下来,我们通过以下等式定义外力分量矢量p:
在图1(a)的情况下,矢量p将是狄拉克delta;函数。在图的情况下。l(b和c),向量p将是一个正态分布的函数。
应力分量张量r 由以下公式定义:
Ac =外力引起的应力增加- Aq应力分量张量tq也可以根据应变模式张量如下扩展:
是应力分量张量的膨胀系数。将高斯积分理论应用于等式。如图13所示,我们可以从位移模式向量t和外力分量向量p的内积中获得膨胀系数fx,如下所示:
换句话说,不必知道应力分量张量r 1的分布以获得其膨胀系数(xf);仅必须知道外力分量向量p的分布。
代表性变形F定义为位移矢量u和外力分量p的内积,如下所示:
徐梓源翻译
在图1(a)的情况下,Gamma;给出了加载点的位移。在图1(b或c)的情况下,Gamma;给出了沿加载区域位移的加权平均值。乘积Gamma;·Delta;G给出了增量外力Delta;q所做的功。
····························································(16)
因此,图3(a)所示的G-Gamma;曲线所围成的区域代表了构件在载荷周期内吸收的能量。
代表性的变形Gamma;可以分解为n个分量,如下式所示:将式8代入式15,利用式14可得
························································(17)
其中,术语,表示次变形模式对代表变形的贡献。图3(b)中,曲线所围成的区域代表变形模式所吸收的能量。
R/C梁与腹板开口
测试样品和设置. 所提出的方法适用于参考文献中的一个样品.4。加固细节和加载条件如图4所示。试样的中间1,000 mm(误差39以内.)长度受到反对称弯曲剪切力的作用。中间部分的腹板和拉筋比分别为0.23%和2.08%。在纵向拉筋周围设置了直径为2.6 mm(误差0.1 以内.)的螺旋筋,以防止粘结分裂失效。腹板开口直径110mm(误差4.3英寸),是梁有效深度的0.3倍,d=366mm(14 4英寸)。
材料的力学性能见表1和表2。混凝土的最大骨料尺寸为10mm(0.4英寸)。由于#2(D6)钢筋没有屈服阶段,故将0.2%的证明应力作为屈服强度。主筋#8(D25)采用高强度钢,以防止屈服。
表1. 混凝土的力学性能
|
抗压强度 (MPa) (1) |
应变
(2) |
割线(Secant)模量在 0.4 x fc (MPa) (3) |
分裂拉伸 强度(MPa) (4) |
|
25.9 |
2.0 x |
22.4 x |
2.23 |
|
注:1 MPa = 145 psi。 |
|||
表2.钢筋的力学性能
|
种类 (1) |
屈服强度(MPa) (2) |
拉伸强度(MPa) (3) |
|
#2 (D6) #8 (D25) |
353 526 |
519 850 |
|
注:1 MPa = 145 psi。 |
||
为了获得二维变形模式,如图5(c)所示,将0.2英寸(6 mm)的螺柱焊接到试样中间部分的蹬板上。螺柱与混凝土之间用软木隔开。用精度为0.001 mm(4times;以内.)的接触量规沿图5(a)中的断线方向测量螺柱上相邻接触点[直径为1.3 mm(0.05以内.)的钢球]之间的相对位移。当相对位移超过接触规的0.5mm极限时,用精度为0.05 mm(0.002以内.)的卡尺代替接触规。通过广义最小二乘法从这些相对位移数据中得到二维变形模式。该方法的详细内容见附录一。
如图6所示,测量了试样中间部分的挠度。在试样关键部位的纵筋上和图7右下角1-8所示点的蹬子上分别贴上箔片量规。
图5.-二维测量仪器(尺寸mm;1,000 mm = 39.4 in.)。) (a) 接触石笼网;(b) A-A段;(c)详细介绍
图6.-试样中间部分的挠度测量(尺寸以毫米为单位;1,000毫米=39.4英寸)。
图7.剪切力与挠度的关系
试验结果.--试样中间部位内的剪力与挠度delta;的关系如图7所示。-delta;曲线上的实心圆圈表示测量二维变形模式的加载步骤。'屈服6、7 '表示6号、7号应变片检测到的应变大于2.0times;,视为马镫的屈服应变。
在开口两侧的Q=88kN(20kips)时,首次检测到镫骨的屈服。试样中央部分的四根马镫在=118kN(27kips)时屈服。沿着开口附近的剪切裂缝,混凝土的破碎开始于=123kN(28kips)。抗剪强度为=158 kN(35.5 kips),此时在临界截面主筋中测得的应变为屈服应变的30 35%。达到最大荷载后,没有再出现明显的裂缝。在挠度=20 mm(0.8 以内.)和25 mm(1.0 以内.)时,观察到镫骨破裂,但阻力的退化很小。
图8所示为试样刚承受最大载荷后的裂纹形态。主剪裂纹从腹板开口边缘开始,在二维测量区域内沿着约45°的方向传播。靠近纵向钢筋时,方向变得更加平坦。
二维变形.--图7中双圈表示的三个加载点的测量二维变形模式如图9所示,夸张了40倍。变形几乎是对称的,且集中在开口附近。
假设应变在元件内线性变化,(如有限元法矩形元素的应变分布),计算出测量点围成的每个方形元素中心的应变。) 在图9(c)的载荷步长,即最大载荷之后,主应变El和£2及其与水平轴BETA的倾斜角如图10所示。图中阴影处为四个主应变较大的元件。阴影元素的主应变方向和大小都很相似,说明变形模式比较简单。在二维测量区域内(约45°),阴影元素的主应变方向比观察到的裂缝法线方向更陡峭。
图9.二维变形图(0.49英寸) - 二维变形模式。(a)Q=99kN,delta;=1.54mm;{b)Q=145kN,delta;=5.45mm;(c)Q=157kN,delta;=12.51mm。
图 8.-挠度为 12.5 毫米(0.49 英寸)时的裂纹图案
模式分解的过程.--根据观察到的裂纹模式,我们考虑图11(a)所示的三种模式,其中应变被假定为集中在裂纹处。根据观察到的裂纹形态,我们认为图11(a)所示的三种模式,应变集中在裂纹处,剪力裂纹在模式SN和ST中的倾斜度假设为45°。剪切法线模态SN与剪切切线模态ST正交,因为剪切裂缝处的相对位移(=集中应变)方向相互正交。屈曲模态B与SN和ST这两种模态的应变都是正交的,因为模态B的变形元件与SN或ST两种模态的变形元件都不同。为了计算公式6a中的应变膨胀系数,将图11(a)中的离散裂纹模型转换为图11(b)中的连续应变模型,在图11(b)中,假定应变在每个方块元素内线性变化。这种转换扰动了模式ST和SN之间的正交性,具体如下。
图10.-挠度为12.5毫米(0.49英寸)时的主应变
图11.变形模式。(a)集中应变;(b)分布应变。
························································(18)
这个值与统一相比足够小,所以我们忽略了正交性的缺失。如公式6a所述,图9中测得的应变分布和图11(b)中假定的应变模和B的内积除以应变模的平方,就得到了应变的膨胀系数和。
为了获得应力分量张量的膨胀系数(,在公式12和14中),我们必须评估外力分量(在公式10和14中的p)沿二维测量区域的外围分布。实际的外力及其在梁的临界部分的增量假设为如图12(a- b)所示。在图12(b)中,我们假设。(1)拉力增量与压
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[262285],资料为PDF文档或Word文档,PDF文档可免费转换为Word

